SystemVerilog SPI communication protocol
Implementention in SystemVerilog of SPI Communication protocol.
The source files are located at the repository root:
The testbench comprises three tests covering controller with single periphey unit and multiple-peripheral unit systems. The SPI communication protocol sub-modules are teste for a single-master and four peripheral units. This is illustrated in the following figure taken from the RTL-viewer in Quartus environment:

-
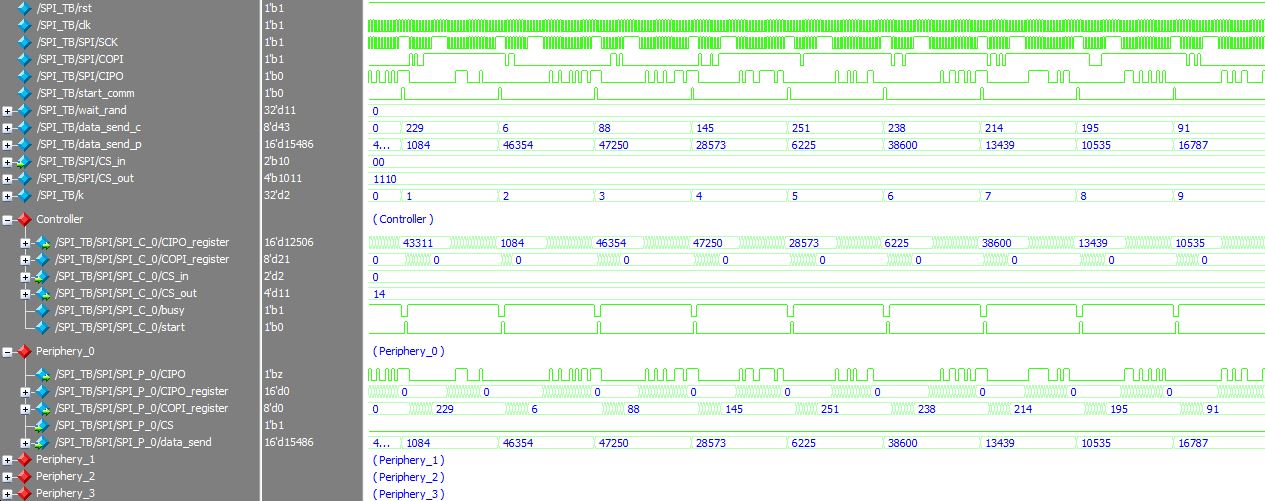
Communication between a single periphery unit and the controller Here the data sent from the controller to the peripheral unit is 8-bit long, the recieved data is 16-bit long and a halt of 5 cycles is enforced betweeb communication intervals (can be observed in the SCK signal). The peripheral unit is 'Periphety_0' (CS==2'b00) and therefore the CIPO line of the other units is 1'bz. The sent words (data_send_p, data_send_c) are randomly generated and compared with the recieving regiters in the controller/periphery unit.
Communication between a single periphery (waveform):
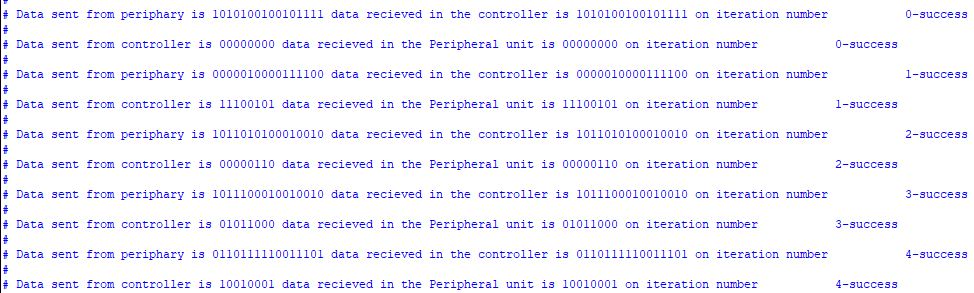
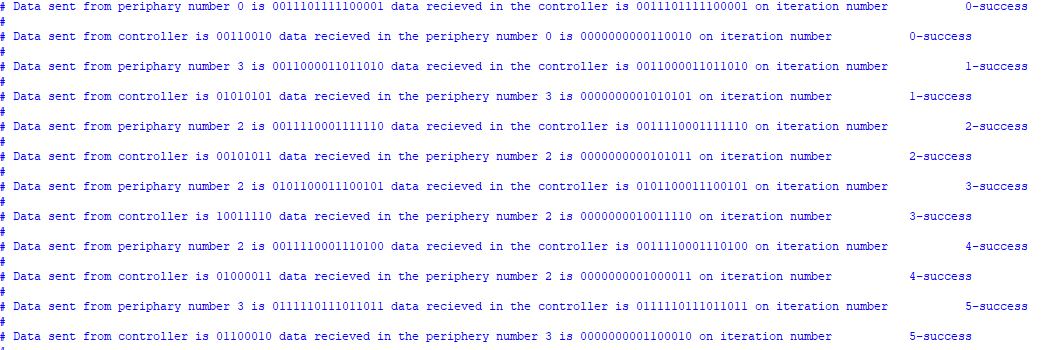
Communication between a single periphery (terminal):
Note: all communication parameters are defined as constants which can be overidden to comply with different data length, pause interval etc.
-
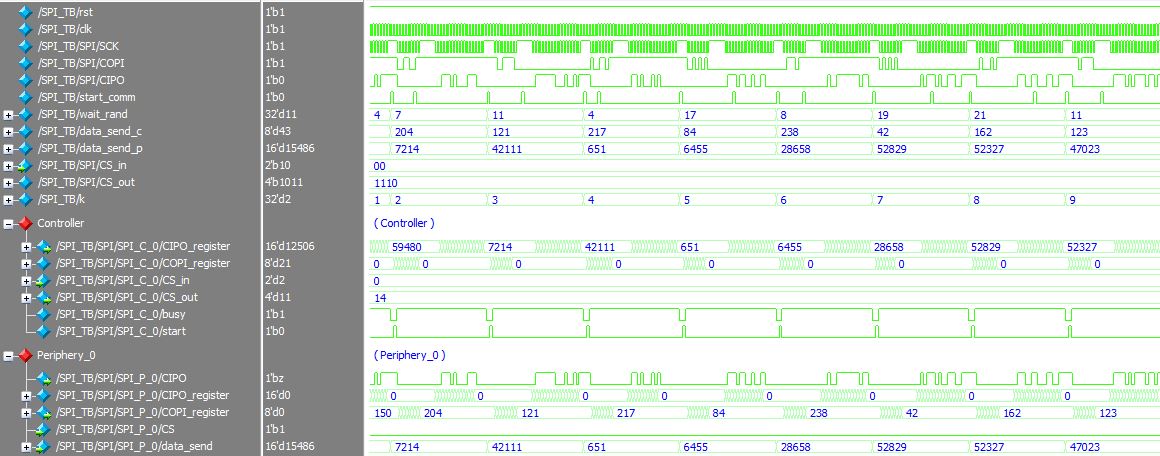
Initiating communication when communication is taking place Communication initiation is carried at the rising edge of 'start_comm' signal. This test verifies that re-trigerring of this signal does not affect ongoing communication activities. Here, a re-trigerring event occurs after 'wait_rand' (randomly generated on each iteration).
Communication between a single periphery (waveform):
-
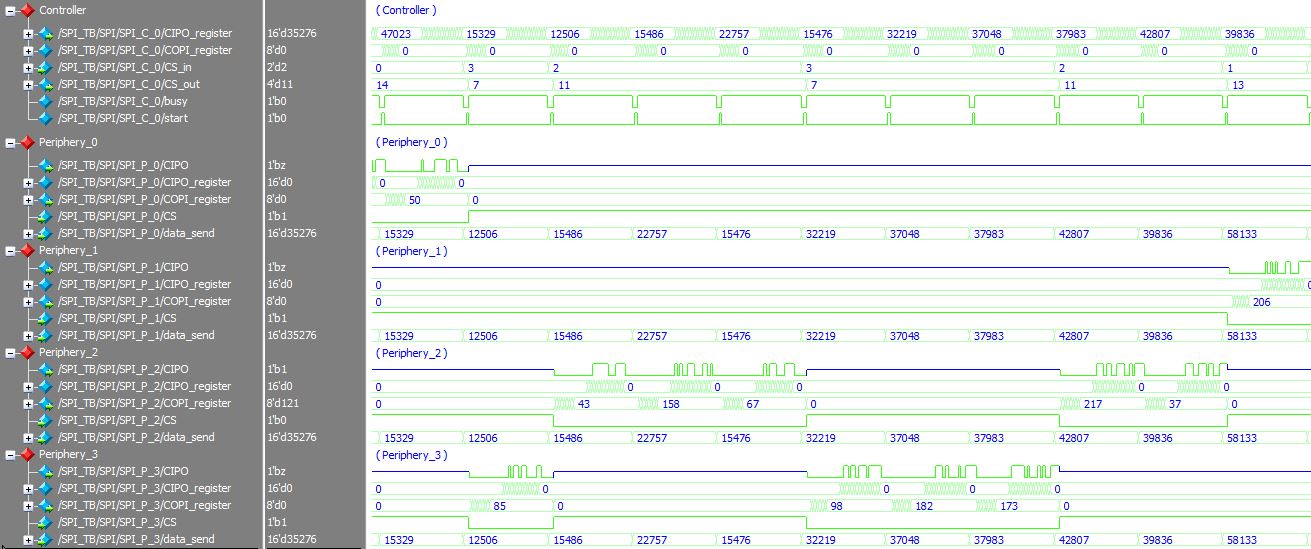
Multiple peripheral units system Communication attributes remain as in the first test. Here, there are four peripheral units communicating with the controller according to the randomly generated CS_in value. As can be seen, based on the CS value the inactive peripheral units' CIPO line is 1'bz.
Multiple peripheral units system (waveform):
Multiple peripheral units system (terminal):





I will be happy to answer any questions.
Approach me here using GitHub Issues or at tom.urkin@gmail.com