- A real-time LiDAR SLAM package that integrates A-LOAM and ScanContext.
- A-LOAM for odometry (i.e., consecutive motion estimation)
- ScanContext for coarse global localization that can deal with big drifts (i.e., place recognition as kidnapped robot problem without initial pose)
- and iSAM2 of GTSAM is used for pose-graph optimization.
- This package aims to show ScanContext's handy applicability.
- The only things a user should do is just to include
Scancontext.h, callmakeAndSaveScancontextAndKeysanddetectLoopClosureID.
- The only things a user should do is just to include
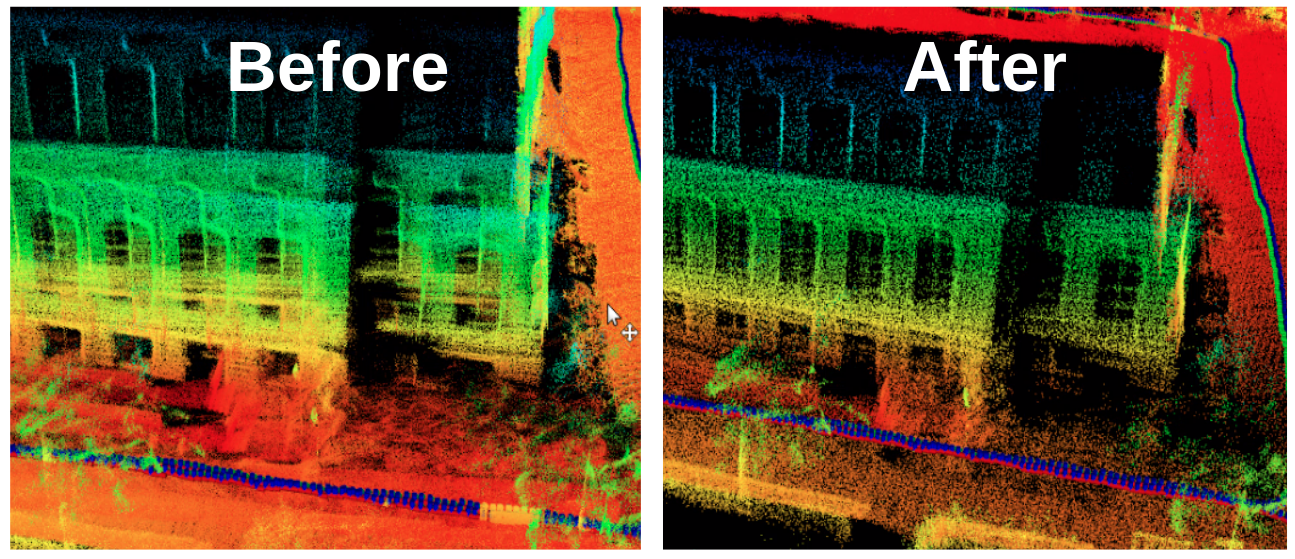
- A strong place recognition and loop closing
- We integrated ScanContext as a loop detector into A-LOAM, and ISAM2-based pose-graph optimization is followed. (see https://youtu.be/okML_zNadhY?t=313 to enjoy the drift-closing moment)
- A modular implementation
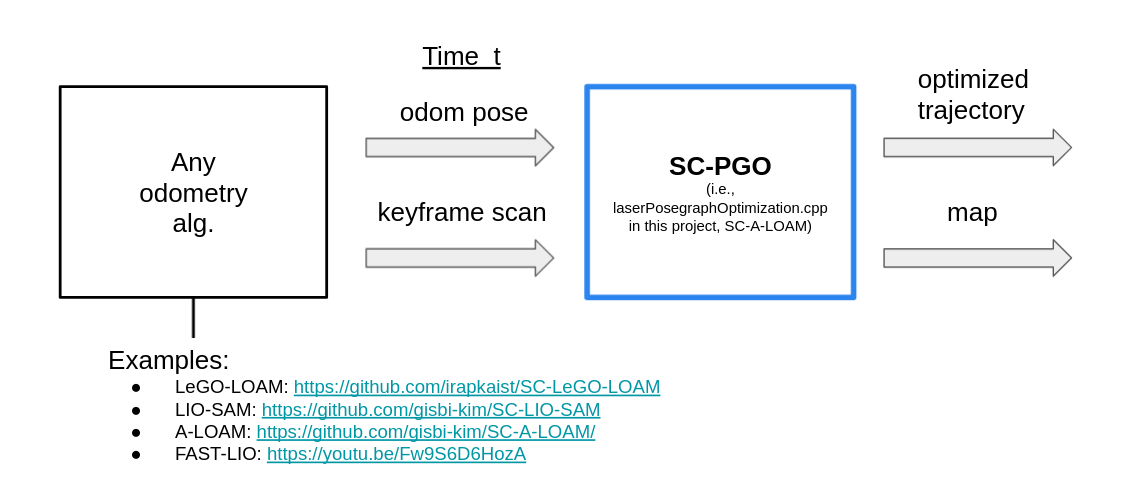
- The only difference from A-LOAM is the addition of the
laserPosegraphOptimization.cppfile. In the new file, we subscribe the point cloud topic and odometry topic (as a result of A-LOAM, published fromlaserMapping.cpp). That is, our implementation is generic to any front-end odometry methods. Thus, our pose-graph optimization module (i.e.,laserPosegraphOptimization.cpp) can easily be integrated with any odometry algorithms such as non-LOAM family or even other sensors (e.g., visual odometry). -
- The only difference from A-LOAM is the addition of the
- (optional) Altitude stabilization using consumer-level GPS
- To make a result more trustworthy, we supports GPS (consumer-level price, such as U-Blox EVK-7P)-based altitude stabilization. The LOAM family of methods are known to be susceptible to z-errors in outdoors. We used the robust loss for only the altitude term. For the details, see the variable
robustGPSNoisein thelaserPosegraphOptimization.cppfile.
- To make a result more trustworthy, we supports GPS (consumer-level price, such as U-Blox EVK-7P)-based altitude stabilization. The LOAM family of methods are known to be susceptible to z-errors in outdoors. We used the robust loss for only the altitude term. For the details, see the variable

- We mainly depend on ROS, Ceres (for A-LOAM), and GTSAM (for pose-graph optimization).
- For the details to install the prerequisites, please follow the A-LOAM and LIO-SAM repositiory.
- The below examples are done under ROS melodic (ubuntu 18) and GTSAM version 4.x.
- First, install the abovementioned dependencies, and follow below lines.
mkdir -p ~/catkin_scaloam_ws/src
cd ~/catkin_scaloam_ws/src
git clone https://github.com/gisbi-kim/SC-A-LOAM.git
cd ../
catkin_make
source ~/catkin_scaloam_ws/devel/setup.bash
roslaunch aloam_velodyne aloam_mulran.launch # for MulRan dataset setting
- The MulRan dataset provides lidar scans (Ouster OS1-64, horizontally mounted, 10Hz) and consumer level gps (U-Blox EVK-7P, 4Hz) data.
- About how to use (publishing data) data: see here https://github.com/irapkaist/file_player_mulran
- example videos on Riverside 01 sequence.
- with consumer level GPS-based altitude stabilization: https://youtu.be/FwAVX5TVm04
- without the z stabilization: https://youtu.be/okML_zNadhY
- example result:

- For KITTI (HDL-64 sensor), run using the command
roslaunch aloam_velodyne aloam_velodyne_HDL_64.launch # for KITTI dataset setting - To publish KITTI scans, you can use mini-kitti publisher, a simple python script: https://github.com/gisbi-kim/mini-kitti-publisher
- example video (no GPS used here): https://youtu.be/hk3Xx8SKkv4
- example result:

- ScanContext also works at indoor environments (use smaller sc_max_radius value).
- example video: https://youtu.be/Uv6_BRmxJho
- example result:

- Scan Context also works for Livox LiDAR data
- In this example, Scan Context is integrated with FAST-LIO (https://github.com/hku-mars/FAST_LIO).
- Note: No additional integration effort is required. A user just run seperately FAST-LIO node and SC-A-LOAM's posegraphoptimization.cpp node!
- example video (tutoial and results): https://youtu.be/Fw9S6D6HozA
- example result:

- Thanks to LOAM, A-LOAM, and LIO-SAM code authors. The major codes in this repository are borrowed from their efforts.
- please contact me through
paulgkim@kaist.ac.kr
- More examples on other datasets (KITTI, complex urban dataset, etc.)
- Delayed RS loop closings
- data saver (e.g., pose-graph, optimized map)
- SLAM with multi-session localization
- Efficient whole map visualization