 |
 |
 |
 |
 |
 |
 |
 |
The code was from scout_ros of Agilex and husky packages of Clearpath Robotics.
- 11/30/2023: Add joystick Enable and Enable Turbo
- 11/29/2023: Add a new joystick user interface
- 11/20/2023: Merge the
noetic-develbranch tomaster - 11/16/2023: Start Noetic version
- 10/29/2023: Add RTabMap example. Tested in the Gazebo simulator.
- 10/23/2023: Change the build system.
catkin_make-->catkin_make_isolatedto supportcartographer - 10/19/2023: Add Gmapping and AMCL test with a simulated 2D LiDAR
- 10/12/2023: Add simulated
YDLIDARforGazebo. - 08/09/2023: Add
xavierparam forstart.launch. The default isxavierwhere the default FPS of Realsense camera is 15. - 08/09/2023: Add a joystick option. The default
XBox. - 08/07/2023: Change the code block to make easier to copy and paste.
- 08/01/2023: Add
CAN port#option - 07/28/2023: Add
YDLIDAR - 07/28/2023: Add more ROS packages.
- 05/14/2023: Reorganize the project to add sensors.
- 05/14/2023: Fix wheel orientations.
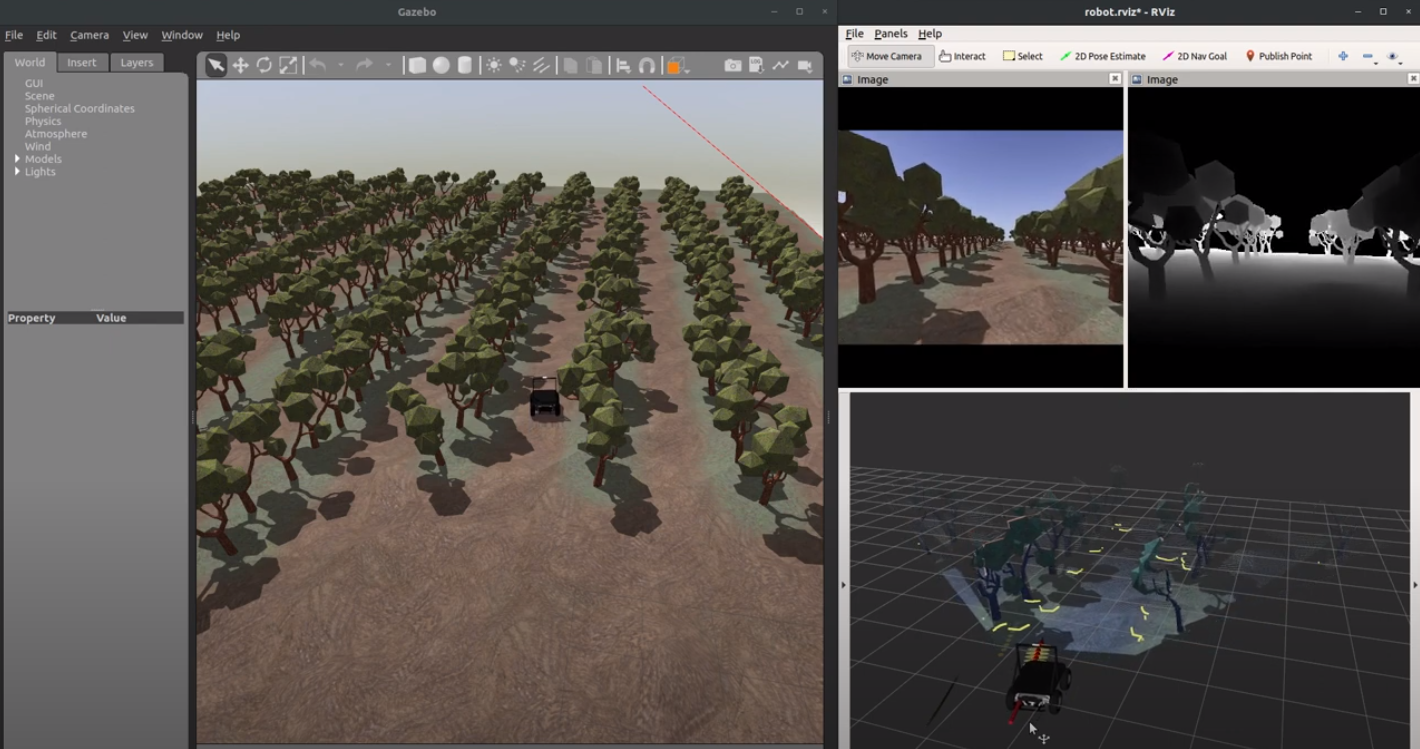
- 05/15/2023: Add a orchard world to test SLAM algorithms in simulation.
sudo apt install -y build-essential
sudo apt install -y libasio-dev
sudo apt install -y lua5.2
sudo apt install -y liblua5.2-dev
sudo apt install -y libceres-dev
sudo apt install -y ros-$ROS_DISTRO-teleop-twist-keyboard
sudo apt install -y ros-$ROS_DISTRO-ros-control
sudo apt install -y ros-$ROS_DISTRO-ros-controllers
sudo apt install -y ros-$ROS_DISTRO-joint-state-publisher-gui
sudo apt install -y ros-$ROS_DISTRO-robot-state-publisher
sudo apt install -y ros-$ROS_DISTRO-roslint
sudo apt install -y ros-$ROS_DISTRO-teleop-twist-joy
sudo apt install -y ros-$ROS_DISTRO-move-base
sudo apt install -y ros-$ROS_DISTRO-rqt
sudo apt install -y ros-$ROS_DISTRO-rqt-common-plugins
sudo apt install -y ros-$ROS_DISTRO-rqt-robot-plugins
sudo apt install -y ros-$ROS_DISTRO-rqt-robot-steering
sudo apt install -y ros-$ROS_DISTRO-dwa-local-planner
sudo apt install -y ros-$ROS_DISTRO-lms1xx
sudo apt install -y ros-$ROS_DISTRO-velodyne-description
sudo apt install -y ros-$ROS_DISTRO-realsense2-camera
sudo apt install -y ros-$ROS_DISTRO-realsense2-description
sudo apt install -y ros-$ROS_DISTRO-robot-localization
sudo apt install -y ros-$ROS_DISTRO-interactive-marker-twist-server
sudo apt install -y ros-$ROS_DISTRO-twist-mux
sudo apt install -y ros-$ROS_DISTRO-joy
sudo apt install -y ros-$ROS_DISTRO-teleop-twist-joy
sudo apt install -y ros-$ROS_DISTRO-pointcloud-to-laserscan
sudo apt install -y ros-$ROS_DISTRO-imu-filter-madgwick
sudo apt install -y ros-$ROS_DISTRO-rviz-imu-plugin
sudo apt install -y ros-$ROS_DISTRO-gmapping
sudo apt install -y ros-$ROS_DISTRO-amcl
sudo apt install -y ros-$ROS_DISTRO-map-server
sudo apt install -y ros-$ROS_DISTRO-octomap-rviz-plugins
sudo apt install -y ros-$ROS_DISTRO-fake-localization-
YDLIDAR SDK
https://github.com/YDLIDAR/YDLidar-SDKgit clone https://github.com/YDLIDAR/YDLidar-SDK.git cd YDLidar-SDK mkdir build cd build cmake .. make sudo make install
Follow the official link for Cartographer installation if there is any discrepancy.
-
Install some ROS build tools if you haven't.
sudo apt update
sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow
-
Download source code and prepare worksapce. Since the source code doesn't need to stay after installation, you can do this at your temporary directory, such as
Download.mkdir -p carto/catkin_ws cd carto/catkin_ws/ wstool init src wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall wstool update -t src -
Commment out
libabsl-devinsrc/cartographer/package.xml.<?xml version="1.0"?> <!-- Copyright 2016 The Cartographer Authors Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0 Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License. --> <package format="3"> <name>cartographer</name> <version>2.0.0</version> <description> Cartographer is a system that provides real-time simultaneous localization and mapping (SLAM) in 2D and 3D across multiple platforms and sensor configurations. </description> <maintainer email="cartographer-owners@googlegroups.com"> The Cartographer Authors </maintainer> <license>Apache 2.0</license> <url>https://github.com/cartographer-project/cartographer</url> <author email="google-cartographer@googlegroups.com"> The Cartographer Authors </author> <buildtool_depend>cmake</buildtool_depend> <build_depend>git</build_depend> <build_depend>google-mock</build_depend> <build_depend>gtest</build_depend> <build_depend>python3-sphinx</build_depend> <depend>libboost-iostreams-dev</depend> <depend>eigen</depend> <!-- depend>libabsl-dev</depend --> <depend>libcairo2-dev</depend> <depend>libceres-dev</depend> <depend>libgflags-dev</depend> <depend>libgoogle-glog-dev</depend> <depend>lua5.2-dev</depend> <depend>protobuf-dev</depend> <export> <build_type>cmake</build_type> </export> </package>
-
Install dependent ROS modules.
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -yCartographer uses the
abseil-cpplibrary that needs to be manually installed using this script:src/cartographer/scripts/install_abseil.sh
-
Build
cartographerSDK andcartographer_roscatkin_make_isolated --install --use-ninja
Install
cartographerSDK andcartographer_rosto the systems'srosdirectorysudo cp -r install_isolated/lib/. /opt/ros/$ROS_DISTRO/lib/. sudo cp -r install_isolated/include/. /opt/ros/$ROS_DISTRO/include/. sudo cp -r install_isolated/bin/. /opt/ros/$ROS_DISTRO/bin/. sudo cp -r install_isolated/share/. /opt/ros/$ROS_DISTRO/share/.
==Note==
If you installed ceres-solver from source code previously, you must uninstall it before building the Cartographer.
cd path-to-the-ceres-solver-bin
sudo make uninstallOtherwise, you would see some CMake errors with CUDA::xxx messsages when you trey to build the Cartographer.
- scout_base: robot node that communicates with the robot hardware
- scout_bringup:a ROS wrapper around ugv_sdk to monitor and control the scout robot
- scout_control: robot control
- scout_description: URDF model for the mobile base, a sample urdf (scout_description/sample/scout_v2_nav.xacro) is provided for customized robot with addtional sensors
- scout_gazebo: simulation
- scout_msgs: scout related message definitions
- scout_navigation: robot control
- scout_viz: visualization of robot and sensors
Launch ROS nodes
A CAN port number must be given. The following code uses CAN1 as an example.
-
IF: this is the first time to use this package, run this bash script to set up the CAN interface for your system.
rosrun scout_bringup setup_can2usb.bash 1
-
ELSE: Start CAN bus. Assumption: You're at
~/catkin_ws./src/agribot_ros/start_can.sh 1
-
Start the base node for scout. The CAN port number can be identified. The default joystick type is XBox. If you want to use the AgileX joystick, you should set
agilex_joystickbe true.roslaunch scout_bringup start.launch can:=1
The default computing platform is set as xavier. If you're using a computer that is not xavier, set this param false when start.launch is used.
The frames per second are set 15 for xavier
The following combination of the versions has been verified for the proper operations.
- Camera firmware :
5.13.0.50 - Realsense SDK version (librealsense2) :
2.50.0 - Real sense ROS Wrapper :
2.3.2
YDLidar ROS driver expects the serial port name as /dev/ydliar. Here is how to change a default linux serial port name and keep it.
https://github.com/YDLIDAR/YDLidar-SDK/blob/master/doc/howto/how_to_create_a_udev_rules.md
Before starting a launch file, you should set environment variables.
- YDLidar Enable
export SCOUT_YDLIDAR_ENABLED=1 - YDLidar Disable
export SCOUT_YDLIDAR_ENABLED=0
-
Start the robot with YDLidar enabled. (default: false)
roslaunch scout_bringup start.launch can:=1 ydliar_enabled:=true
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _repeat_rate:=50.0Make sure the mode switch is “X.” In XInput mode, the gamepad uses standard Windows XInput gamepad drivers. “D,” DirectInput is an older input standard for games on the Windows operating system.
The Enable Button (LB) must be held to control directions. When this button is released, the robot stops.
Teleop configuration for Logitech F710 Gamepad
using the x-pad configuration.
Original User Interface Design in "teleop_twist_joy"
Left thumb-stick up/down for velocity, left/right for twist
LB for enable
RB for enable-turbo
New Design for Agribot <-- This is the current default selection
Left thumb-stick (LJ) up for thrtttle
Left thumb-stick (LJ) down for brake
NOTE:
No brake is for the Scout robot.
When Left thumb-stick is down with the FORWARD gearshift,
the robot actually moves backward.
Left thumb-stick (LJ) left/right for twist
LB for enable
RB for enable-turbo
Gearshift:
Y: Forward
A: Reverse
B: Neutral
(LB) (RB)
(LT) (RT)
_=====_ D( .)X _=====_
/ _____ \ / _____ \
+.-'_____'-.---------------------------.-'_____'-.+
/ | | '. .' | | \
/ ___| /|\ |___ \ (back)(Lgtc)(strt) / ___| (Y) |___ \
/ | | | ; __ __ ; | | |
| | <--- ---> | | (__) . (__) | | (X) (B)| |
| |___ | ___| ; MODE VIBE ; |___ ____| /
|\ | \|/ | / _ ___ _ \ | (A) | /|
| \ |_____| .','" "', |___| ,'" "', '. |_____| .' |
| '-.______.-' / \ANALOG/ \ '-._____.-' |
| | LJ |------| RJ | |
| /\ / \ /\ |
| / '.___.' '.___.' \ |
| / \ |
\ / \ /
\________/ \_________/
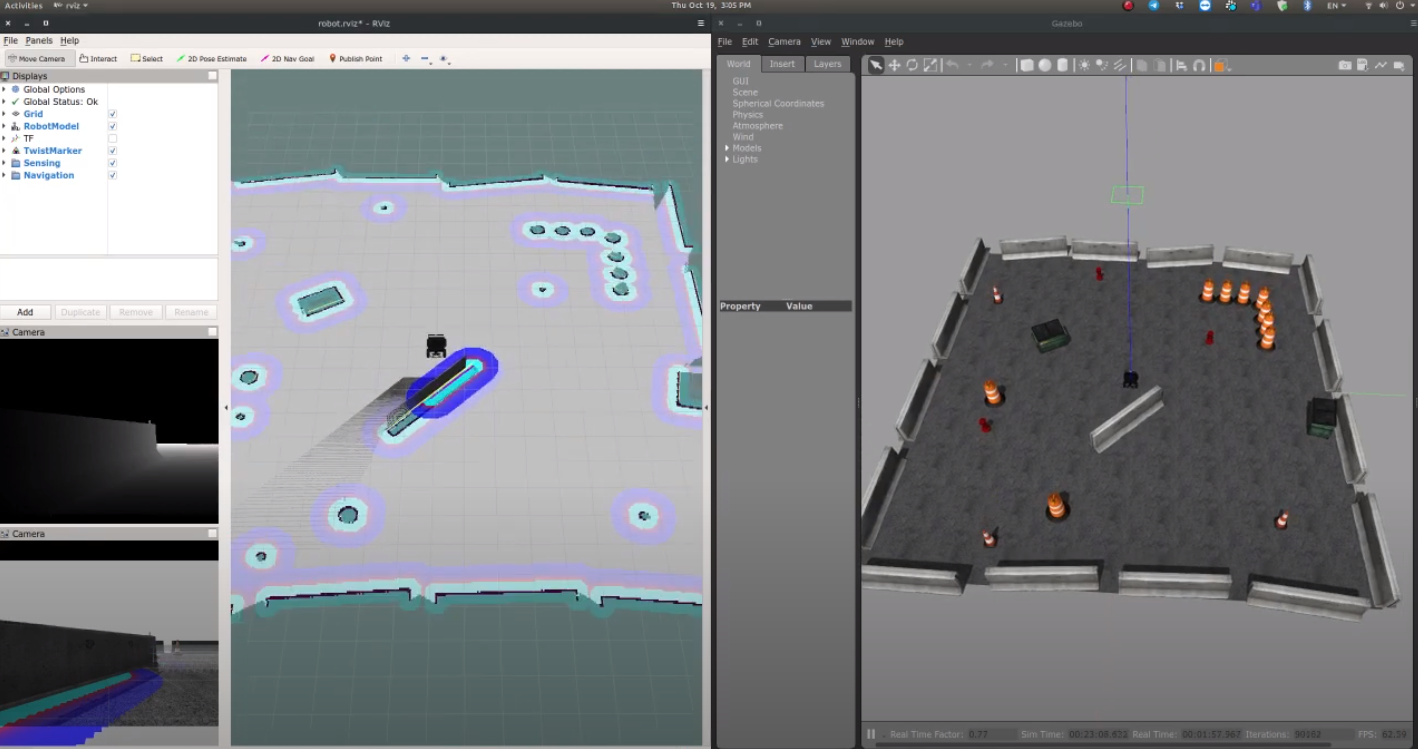
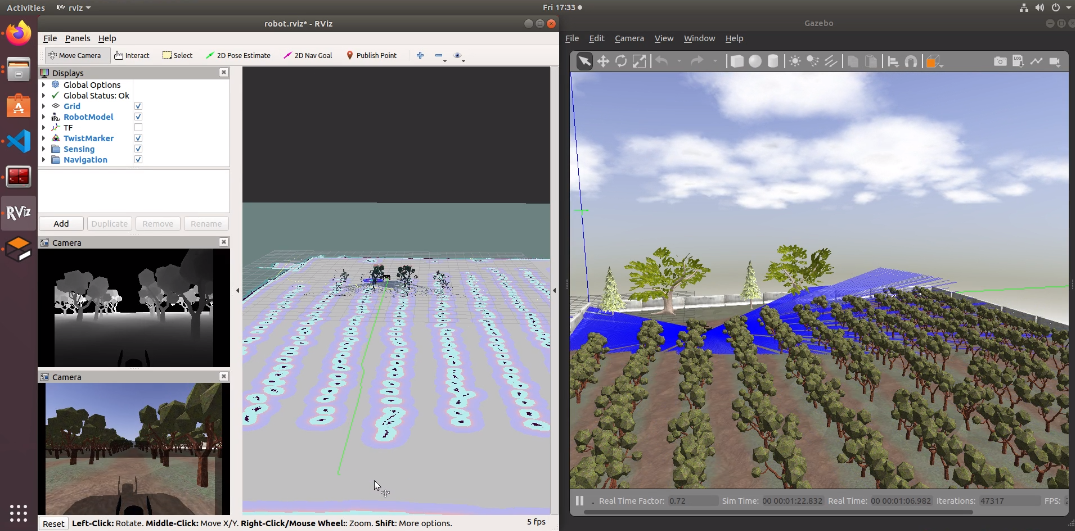
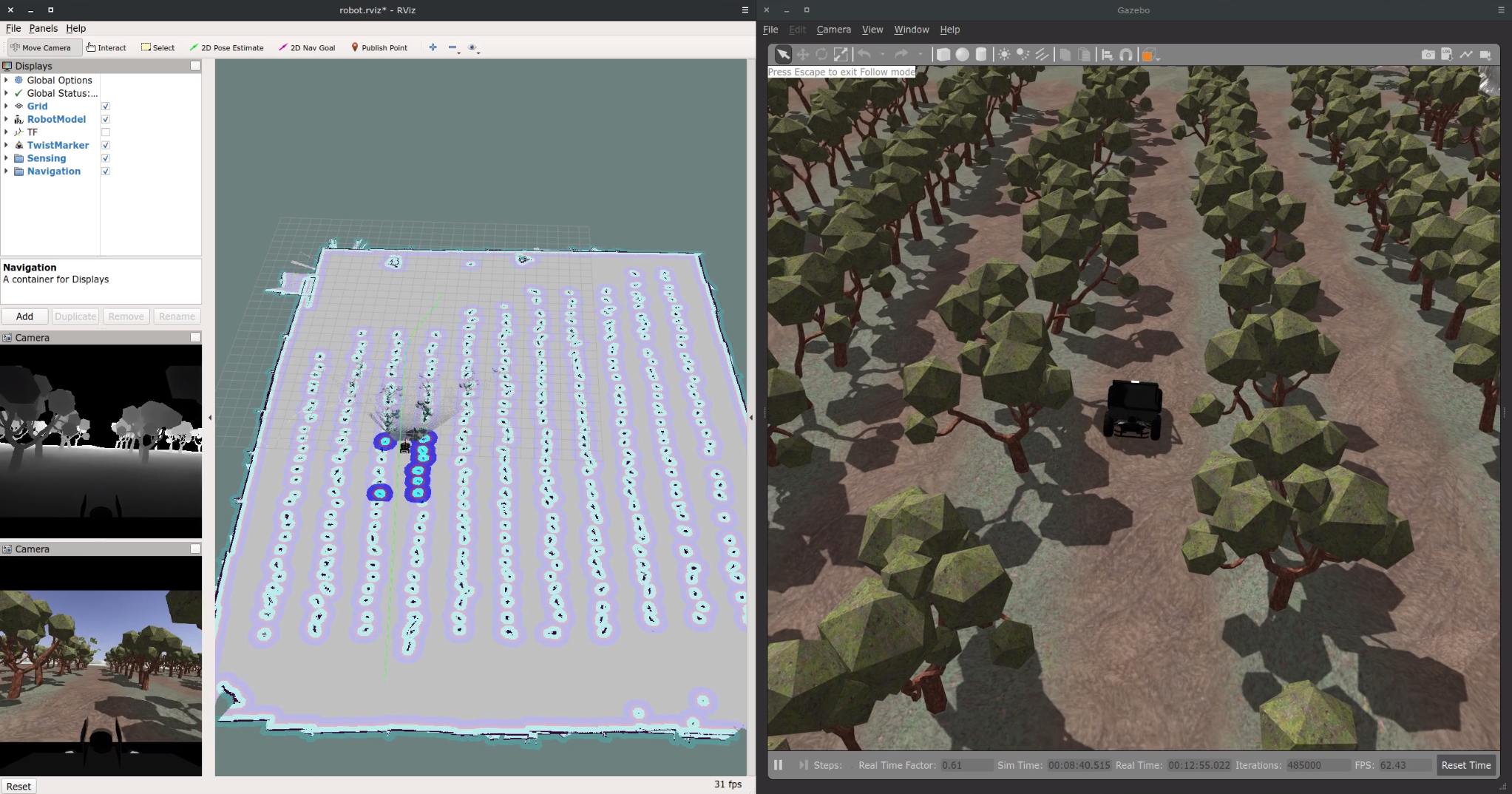
roslaunch scout_control teleop_joystick.launchIf you test a SLAM inside the Gazebo, start a Gazebo with a world file. The available world names are
scout_playpenscout_orchard_world
roslaunch scout_gazebo <world_name>.launchOpen another terminal.
roslaunch scout_navigation gmapping.launchDrive the robot to build a map. You can save a map using map_saver of map_server.
rosrun map_server map_saver -f <map-filename>Start amcl_navigation.
roslaunch scout_navigation amcl_navigation.launch map_file:=<map_file.yaml> In the rviz, you will see a map. Set a goal with the 2D Nav Gaol button. If the goal position can make a path from the current robot position, the robot will start moving.
- Make sure
Navigationis checked in the Rviz. - You will see a map.
- Set a goal with the
2D Nav Gaolbutton.
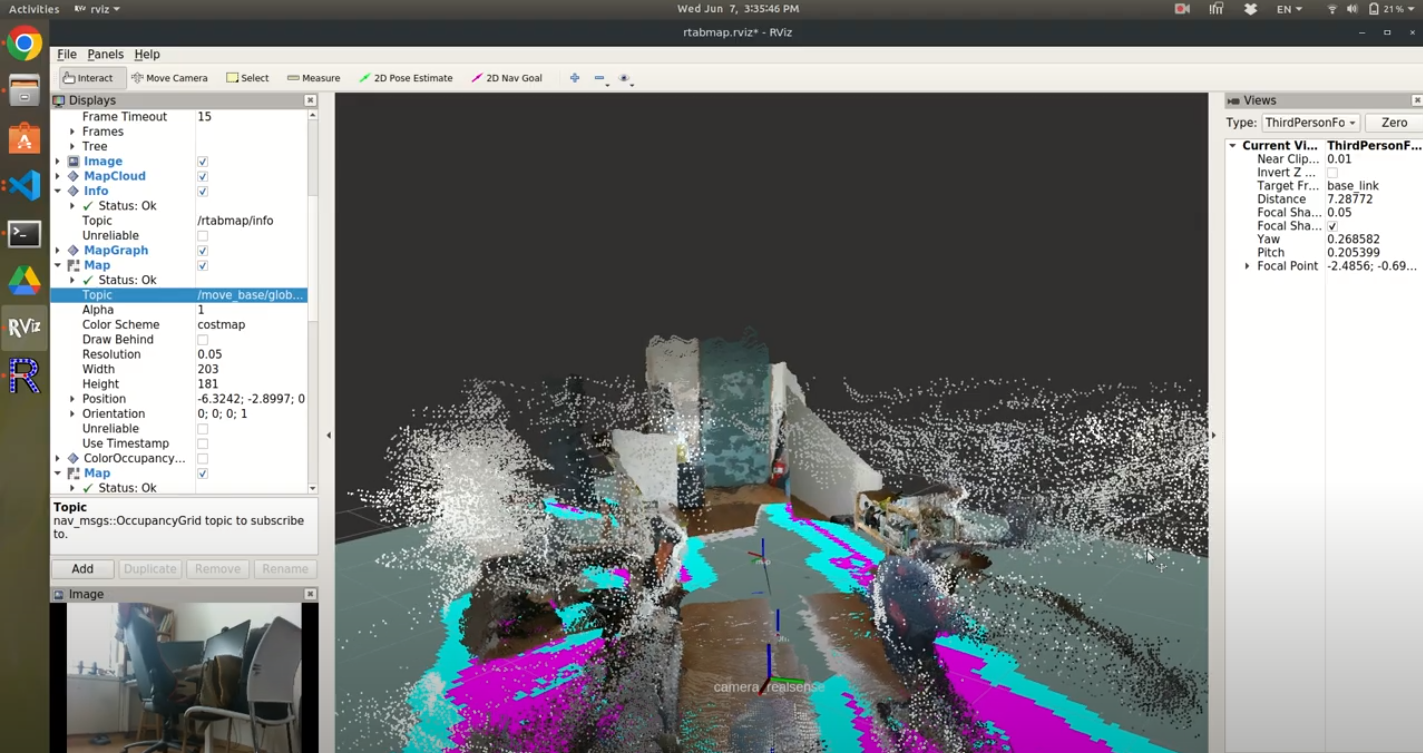
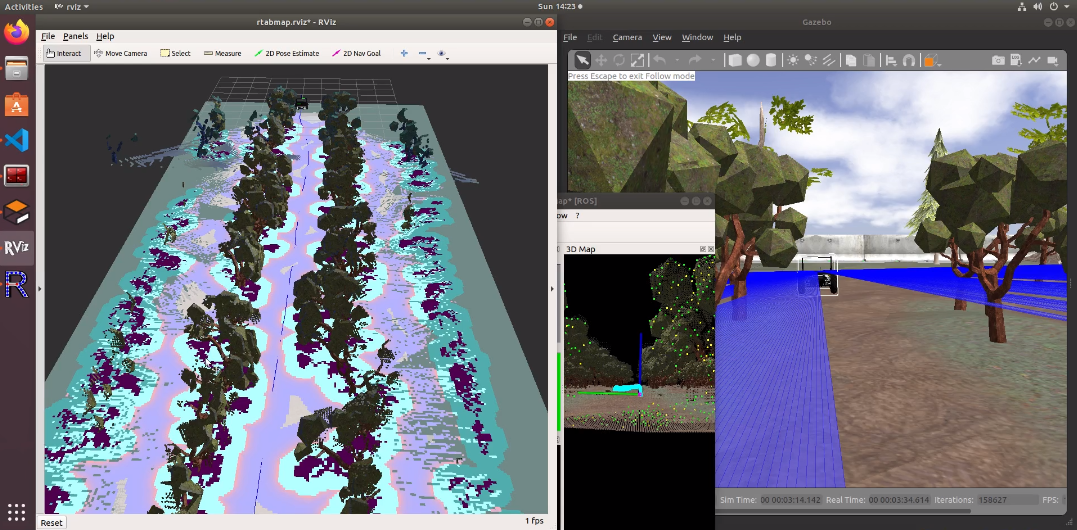
For RTabMap, rtabmap_map and rtabmap_navigation use a different rviz configuration. So, scout_gazebo is not supposed to start rviz. Use rviz:=false
roslaunch scout_gazebo <world_name>.launch rviz:=falseThe map_id is used to identify a map. If you build several maps, you can idenfify a map with map_id.
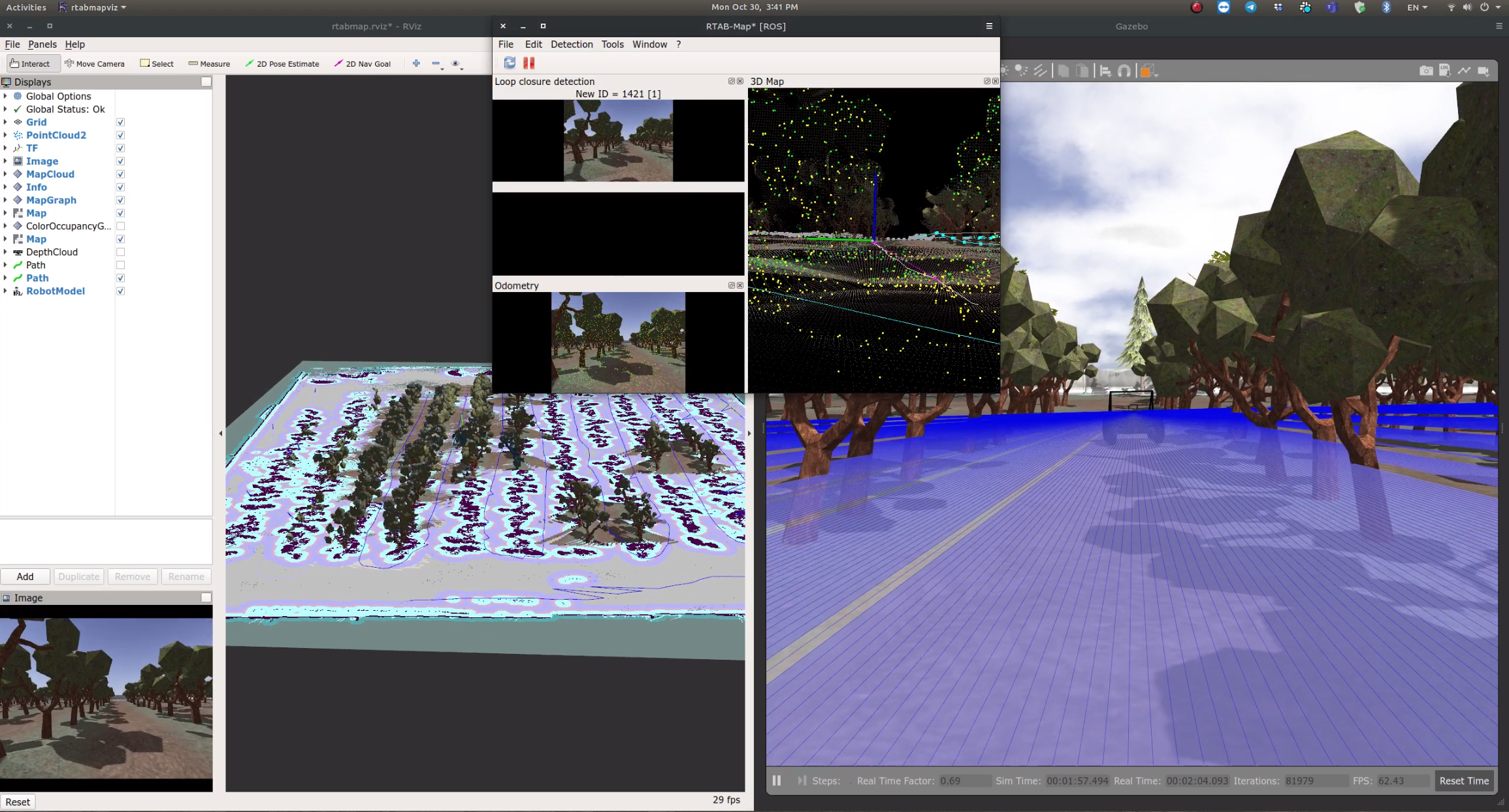
roslaunch scout_navigation rtabmap_map.launch map_id:=<map_id>This is an example of a map visualize by rtabmap-databaseViewer.

Note that RTabMap does not use amcl for navigation.
The map_id is used to identify a map. If you build several maps, you can idenfify a map with map_id.
roslaunch scout_navigation rtabmap_navigation.launch map_id:=<map_id>Use Rviz to set a goal position and orientation.
- Jaerock Kwon, PhD, Assistant Professor, Electrical and Computer Engineering, University of Michigan-Dearborn
- Woojin Jeong, PhD, WApplE Cloud Co., Ltd., Korea
- Young Seek Cho, PhD, Professor at Wonkwang University, Korea
- Elahe Delavari, PhD student, Electrical and Computer Engineering, University of Michigan-Dearborn
- Feeza Khanzada, PhD student, Electrical and Computer Engineering, University of Michigan-Dearborn