Description: Implementing autonomous behaviours for a drone to be able to reforest any given area without teleoperating.

📖 User documentation • 👨💻 Developer documentation • 📈 Project report • 📚 Bibliography
This project, led by Julien GENESTE, was created in response to the many fires in Gironde and more generally in France. It follows on from the POCDroneReforestation project, in which an Unmanned Aerial Vehicle (UAV) equiped with a seed cannon was developped. At that point, the drone could only be teleoperated. The first video shows the results of that project, i.e. our starting point.
The idea of this project is to make the drone autonomous using the middleware ROS 2 (Humble). The objectives are as follows:
- Find a way to precisely locate the drone at all times during the planting process
- Make the drone aware of its environment using the proper sensors. (Is the terrain suitable for planting? Are there obstacles?)
- Generate a trajectory to accomplish the mission, ensuring it is as efficient as possible.
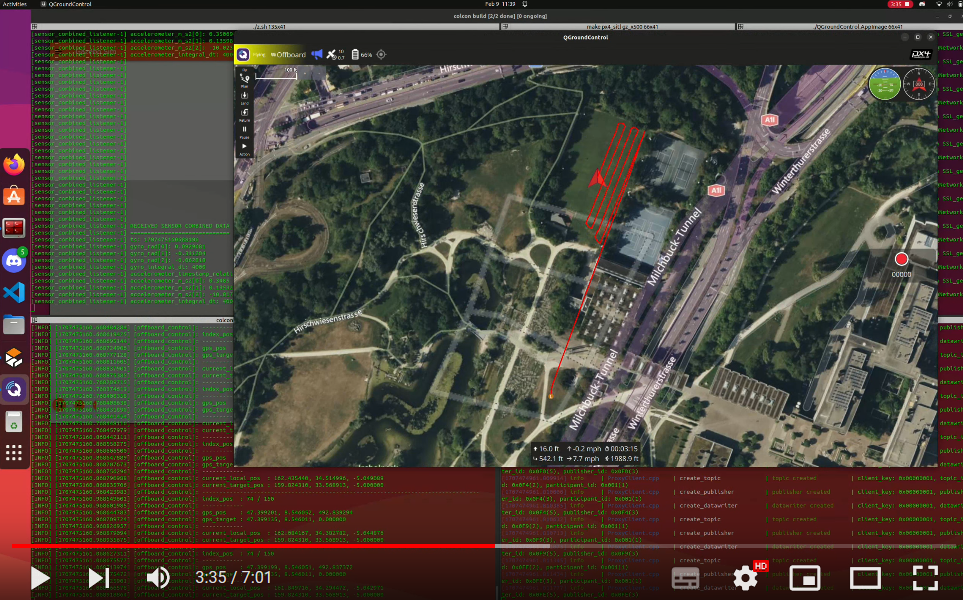
To summarize, we use RTK to locate the drone, a 3D camera to detect obstacles beneath the drone and we define a Back and Forth Path (BFP) to cover the area. The second video presents an example of a trajectory generated by our algorithms.
- 📈 More insight into our solutions and results can be found in the Project Report.
- 📖 You can find install instructions and detailed testing steps in the User documentation.
- 👨💻 You can find more information about the code, as well as some information about our work on the seed canon in the Developper documentation.
- 📚 The state of the art is available in the Bibliography.
| 💼 Client | Julien GENESTE |
| 🔒 Confidentiality | Public |
| 👨👨👦 Authors | Camille PARRATT , Margo BIRET , Théodore GIGAULT, Lucas GAVERIAUX |