mick_robot_chasiss
项目文档:https://mickrobot.github.io/
注:代码默认的分支master分支适用于四轮差速小车,X4分支为第一版小车代码分支。 M4分支为麦克纳姆轮第一版小车代码分支。
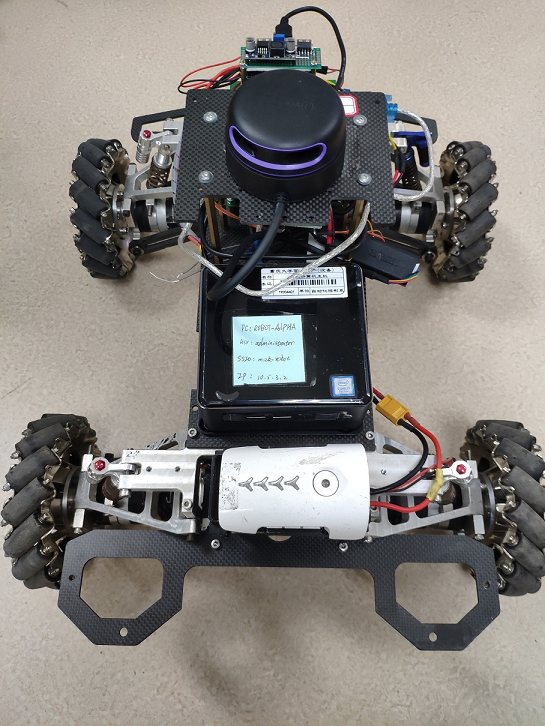
本项目描述了针对室外环境设计的一个开源ROS小车底盘,项目描述了小车的3D机械图,基于STM32设计的小车控制板,电源板(为传感器供电);小车的PCB、代码及3D图纸均是开源,大家可以自行下载打样学习。注意:新开源的电源板和控制板仅供大家自己打样学习用,切勿用于商业用途。问题、项目合作可联系 cenruping@vip.qq.com,可以代为调试、新开发线控底盘或针对已有的小车底盘设计工业版控制器及大功率电源模块。也欢迎加QQ群讨论交流 1149897304 (开源ROS自主导航小车);
文件目录说明
-
ROS_Node:小车底盘配套的ROS节点,其功能为对外发布小车里程计数据,接收ros cmd_vel话题控制命令控制小车移动,ROS节点与控制板的通讯协议: https://docs.qq.com/sheet/DV2hmSEdSYVVtclB4
-
STM32_Code:存放小车上嵌入式控制板的代码文件,控制器采用STM32F103c8t6,电机采用了大疆M3508电机和C620电调
-
3D_Model_xxx:存放小车3D模型文件
-
PCB_File:存放小车上所用PCB文件
-
Reference_Documents:存放相关的传感器的使用手册等
1 更新日志
2023-11-05
- 增加MPU6050 DMP函数,直接读取6050 DMP处理单元输出数据四元数
2022-4-20
- 1、增加了对SBUS控制信号的解码程序,支持SBUS遥控器
- 2、对代码增加了注释
2021-4-18
- 1、开源了小车的电源板和小车控制板
- 2、将DBUS、上位机发送的命令移到中断函数中进行处理
- 3、将PID相关计算函数移到PID.c中
- 4、添加MPU9250 读取和姿态计算函数
2020-9-8
- 1、更新了DBUS中的函数名称
- 2、更新遥控器信号丢失造成的数据乱码引起“疯转”的问题
- 3、统一4轮和2轮差速小车模型电机控制函数的单位为 m/s 和 rad/s
2019-10-07
- 添加ROS节点下发命令清零里程计数据功能
2020-9-9
- 更新MickM4 麦克纳姆轮底盘的代码
2 差速小车底盘启动
master分支代码文件可适配两轮、四轮差速小车。两轮差速底盘,主需要把底盘电机ID设置为1和3即可使用4轮差速底盘相同的命令。
连线配置小车
git clone https://github.com/RuPingCen/mick_robot_chasiss.git
下载代码工程以后,可以根据博客:https://rupingcen.blog.csdn.net/article/details/117257934 去装配小车电机,控制板,设置遥控器。
刷写STM32代码到控制板中,控制板通过CAN总线控制电机,电机采用的是大疆M3508电机和C620电调。
==注:==小车的控制板连线,遥控器操作说明等,可以参考项目主页 https://mickrobot.github.io/
在ROS中启动小车
step1: 将ROS_Node中的mick_bringup目标代码拷贝到ROS工作空间进行编译
cp -r mick_bringup ~/catkin_ws/src
catkin_makestep2: 通过USB转232串口线连接电脑和小车控制板,
修改串口权限(可以查看设备的ID号 ls /dev/ttyUSB*)
sudo chmod 766 /dev/ttyUSB0 或者根据串口设备的标识符去设置串口别名
cd mick_bringup/scripts
sudo cp ultrasonic.rules /etc/udev/rules.d/
把文件拷贝到/etc/udev/rules.d目录下就可以使用 /dev/mick替代 /dev/ttyUSB0 来访问模块了
step3: 启动ROS节点
roslaunch mick_bringup mickx4_bringup.launch该节点会对外发布、接收以下话题:
- /cmd_vel : 接收话题名称,可通过launch文件中 sub_cmdvel_topic 进行修改
- /odom:发布话题名称,可通过launch文件中参数 pub_odom_topic 进行修改
mickx4_bringup launch文件内容如下:
<node pkg="mick_bringup" type="mick_bringup" name="mick_bringup" output="screen">
<param name="sub_cmdvel_topic" value="/cmd_vel" type="str" />
<param name="pub_odom_topic" value="/odom" type="str" />
<param name="dev" value="/dev/ttyUSB0" type="str" />
<param name="baud" value="115200" type="int" />
<param name="time_out" value="1000" type="int" />
<param name="hz" value="100" type="int" />
<param name="is_pub_path" value="0" type="int" /> <!--0: 不发布底盘轨迹 1: 发布 -->
<param name="chassis_type" value="0" type="int" /> <!--0: 差速底盘 1: 麦克纳姆轮底盘 -->
</node>step4: 通过键盘遥控小车底盘
这里借助turtlebot3提供的键盘控制节点,检验小车与ROS节点通讯是否正常
注意:需要安装 sudo apt-get install ros-noetic-turtlebot3-teleop 包
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_bringup turtlebot3_model.launch
3 MickM4分支
MickM4分支为麦克纳姆轮ROS底盘的底盘控制程序,代码适用于STM32F103及C620电调
更多的信息可以参考博客地址:https://blog.csdn.net/crp997576280/article/details/102026459
git clone -b MickM4 https://github.com/RuPingCen/mick_robot_chasiss.git
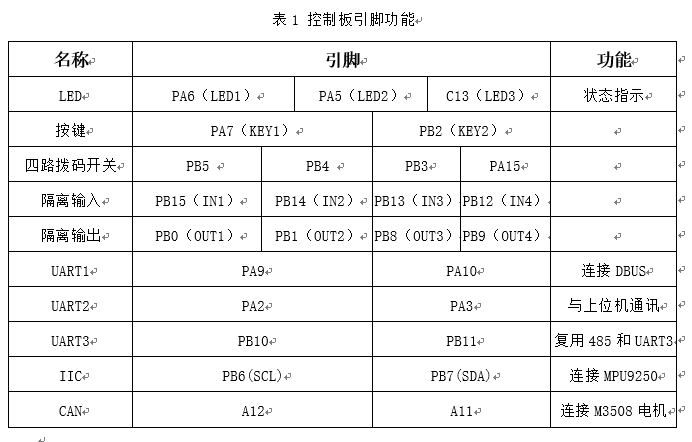
4 小车控制板-功能说明
4.1 小车控制板接口
控制板输入20-36V DC直流,对外提供1路DC 5V 2A 、1路DC 12V 2A 对车载传感器供电。
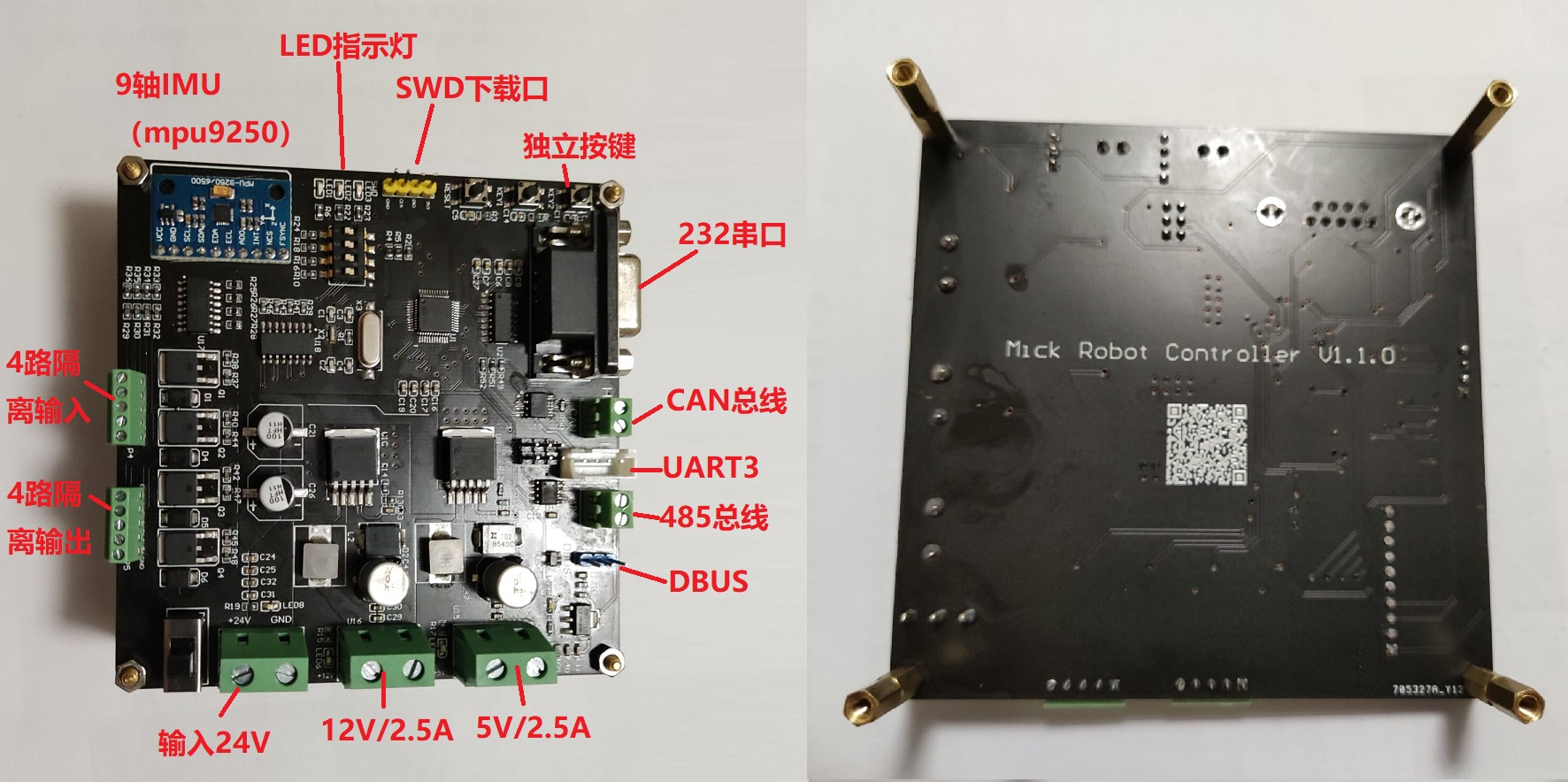
提供1路DBUS接口、1路232接口、1路CAN总线、1路485接口、1路UART3接口(与485复用)、1路IIC。其中DBUS被用来接收遥航模遥控器的数据,232接口负责与上位机ROS通讯。CAN总线连接4个M3508电机。IIC连接板子上安装的MPU9250。485接口和UART3接口复用,可扩展其他传感器模块。 3路LED指示灯用于显示程序状态。2路按键、4路拨码开关用于调试和选择程序功能。4路隔离输入(输入电压范围12-24V)。4路隔离输出(输出高阻态和GND,承受电流2A)。
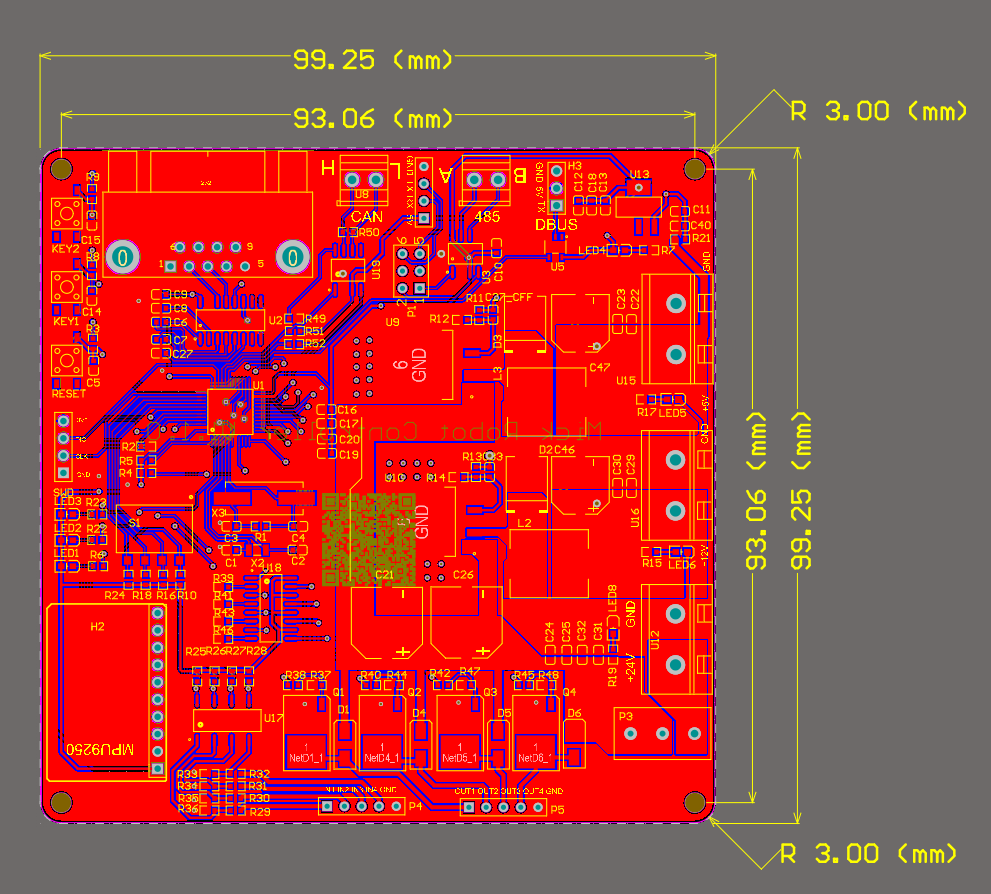
4.2 小车控制板外形尺寸
板子外形为99*99 mm 安装孔位于四周呈轴对称分布,孔中心间距为93mm,孔直径为φ3.1 mm。如图5所示。
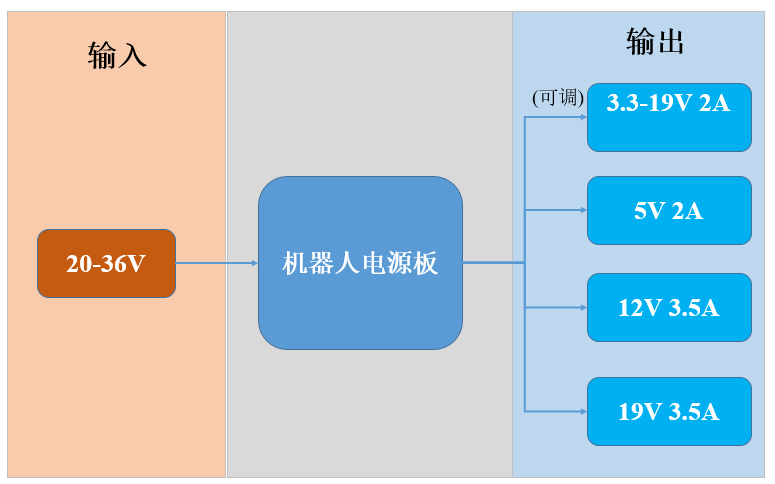
5 小车电源板-功能说明
如下图所示,电源板输入20-36V DC直流,输出1路DC 5V 2A 、1路DC 3.3-19V 2A 可调电源 、1路DC 12V 3.5A、1路DC 19V 3.5A,可满足对工控机和自主导航小车车载传感器供电需求。
5.1 电源板参数
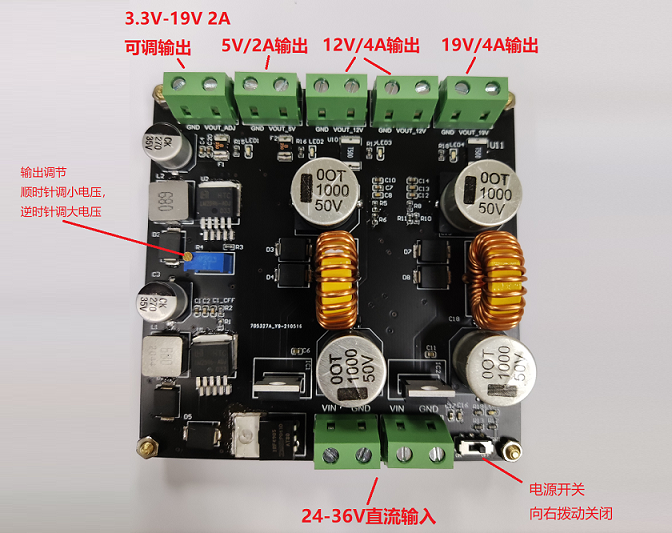
经过电子负载实际测试,5V和3.3V-19V 采用LM2596S方案,每一路可实现2A的稳定输出,加装散热片以后可实现2.5A长时间输出。
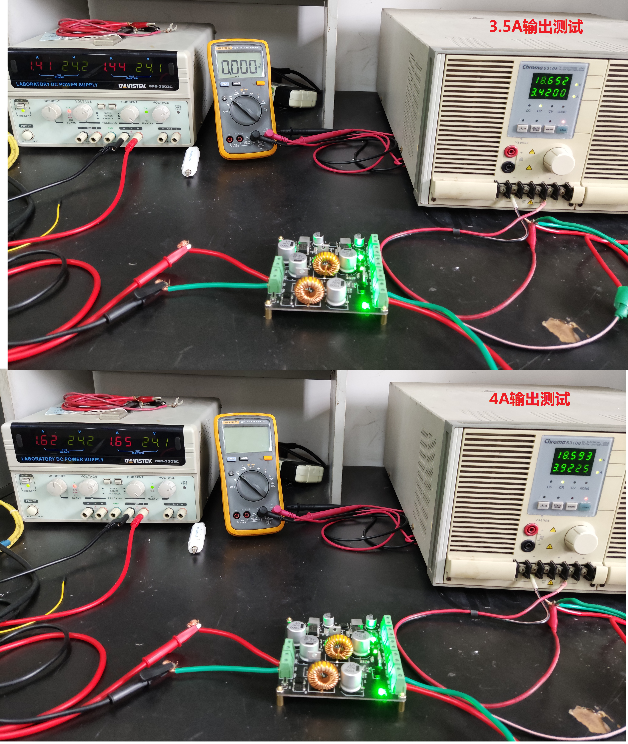
12V 在电子负载实测中可以达到长时间稳定输出3.5A 输出,加装扇热片以后可以实现4A长时间输出,短时可达4.5A。
19V在电子负载实测中可以达到长时间稳定输出3.5A 输出,加装扇热片以后可以实现4A长时间输出,短时可达4.5A,如下图所示。
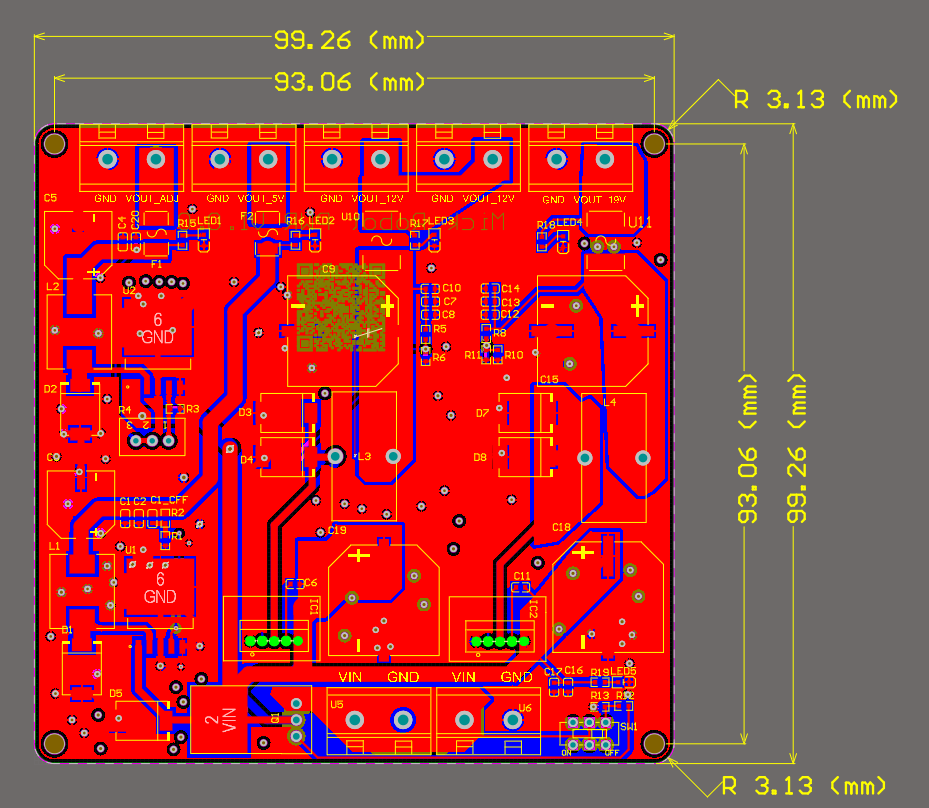
5.2 外形尺寸
板子外形为99*99 mm 安装孔位于四周呈轴对称分布,孔中心间距为93mm,孔直径为φ3.1 mm。如图6所示。