- A SOTA Decoder for End-to-End Autonomous Driving under BEV
- arXiv Paper (CVPR 2023)

- Installation
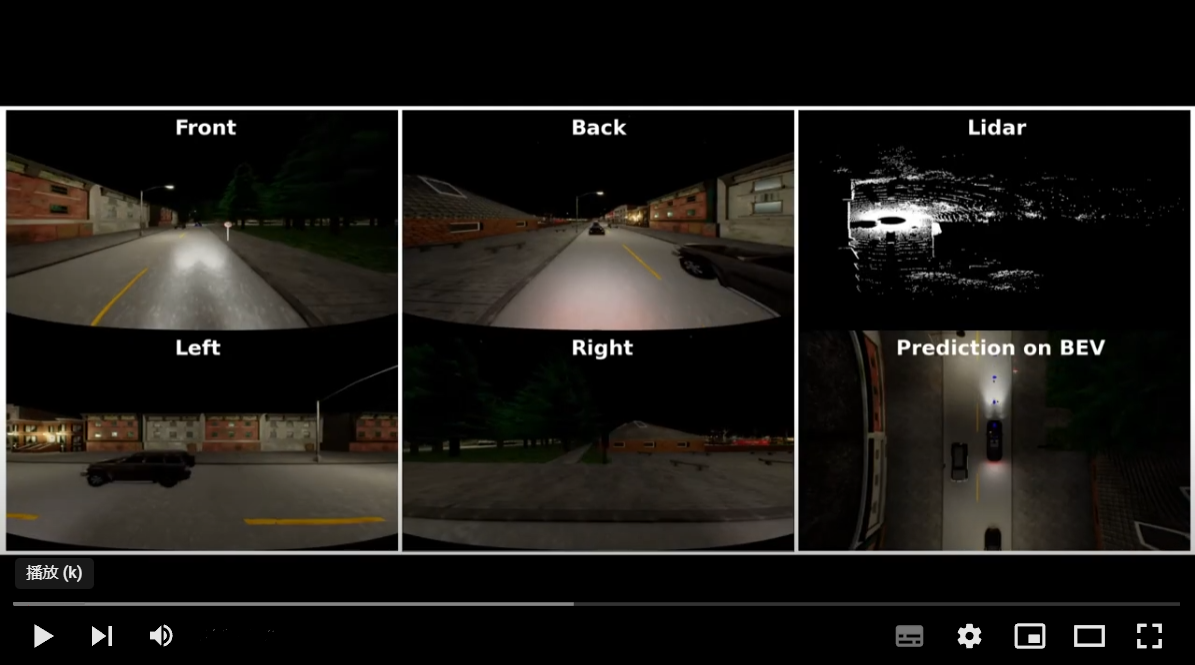
- Closed-Loop Evaluation in Carla
- Prepare Dataset
- Train Your Own Model
- Calibrations for Different Camera Settings (Optional)
Install the environment as in Installation, download our checkpoint (GoogleDrive or BaiduYun(提取码 m5di).) (189K frames training set), put it into open_loop_training/ckpt, and run:
## In the ThinkTwice/ directory
CUDA_VISIBLE_DEVICES=0 nohup bash ./leaderboard/scripts/evaluation_town05long.sh 22023 22033 thinktwice_agent False True open_loop_training/ckpt/thinktwice.pth+open_loop_training/configs/thinktwice.py all_towns_traffic_scenarios_no256 thinktwice_town05long 2>&1 > thinktwice_town05long.log &Check closed_loop_eval_log/eval_log to see how our model drives in Carla! 🚘
(In case you have a screen to see the interface of Carla simulator, you could remove DISPLAY= in leaderboard/leaderboard/leaderboard_evaluator.py and then you could directly watch with Carla.)
We give the structure of our code. Note that we only introduce those folders/files are commonly used and modified.
ThinkTwice/
├── agents # From Carla official
├── camera_calibration # When you want to use cameras with different FOV
├── closed_loop_eval_log # Save eval logs
├── collect_data_json # Save data collection logs
├── dataset # Data and metadata for training
├── leaderboard # Code for Closed-Loop Evaluation
│ ├── data # Save routes and scenarios
│ ├── scripts # Run with Carla
│ ├── team_code # Your
| | ├── roach_ap_agent_data_collection.py # Data collection
│ | └── thinktwice_agent.py # Interface for closed-loop evaluation of our model
│ ├── leaderboard # From Carla official
| | └── leaderboard_evaluator.py # Entrance of closed-loop evaluation
├── roach # Roach for data collection
├── scenario_runner # From Carla official
├── open_loop_training # Training and Neural Network
| ├── ckpt # Checkpoints
| ├── work_dirs # Training Log
| ├── code # Preprocessing, DataLoader, Model
| │ ├── apis # Training pipeline for mmdet3D
| │ ├── core # The hooks for mmdet3D
| │ ├── datasets # Preprocessing and DataLoader
| | | ├── pipelines # Functions of Preprocessing and DataLoader
| │ | ├── samplers # For DDP
| │ | └── carla_dataset.py # Framework of Preprocessing and DataLoading
| │ ├── model_code # Neural Network
| | | ├── backbones # Module of Encoder
| | | └── dense_heads # Module of Decoder and Loss Functions
| │ └── encoder_decoder_framework.py # Entrance of Neural Network
| └── train.py # Entrance of Training
All assets and code are under the Apache 2.0 license unless specified otherwise.
If this work is helpful for your research, please consider citing the following BibTeX entry.
@inproceedings{jia2023thinktwice,
title={Think Twice before Driving: Towards Scalable Decoders for End-to-End Autonomous Driving},
author={Jia, Xiaosong and Wu, Penghao and Chen, Li and Xie, Jiangwei and He, Conghui and Yan, Junchi and Li, Hongyang},
booktitle={CVPR},
year={2023}
}
Many thanks to the open-source community!
- End-to-end Autonomous Driving Survey (:rocket:Ours!)
- TCP (:rocket:Ours!)
- BEVFormer (:rocket:Ours!)
- UniAD (:rocket:Ours!)
- ST-P3 (:rocket:Ours!)
- Carla
- Roach
- Transfuser
- CARLA_GARGE
- LAV
- IBISCape