this reposity introduce a planner for vehicle parking, create the obstacle map using picture convolution algorithm.
- ROS
- OMPL
- fftw3
- map_server
this project test on the ubuntu20.04
- enter into the
catkin_wsfolder and running:
$ catkin_make- if make is success, then run
roslaunch
$ roslaunch src/ros_rrt_bias/luanch/rrt_base_test.launchafter that command, you will see follw window:
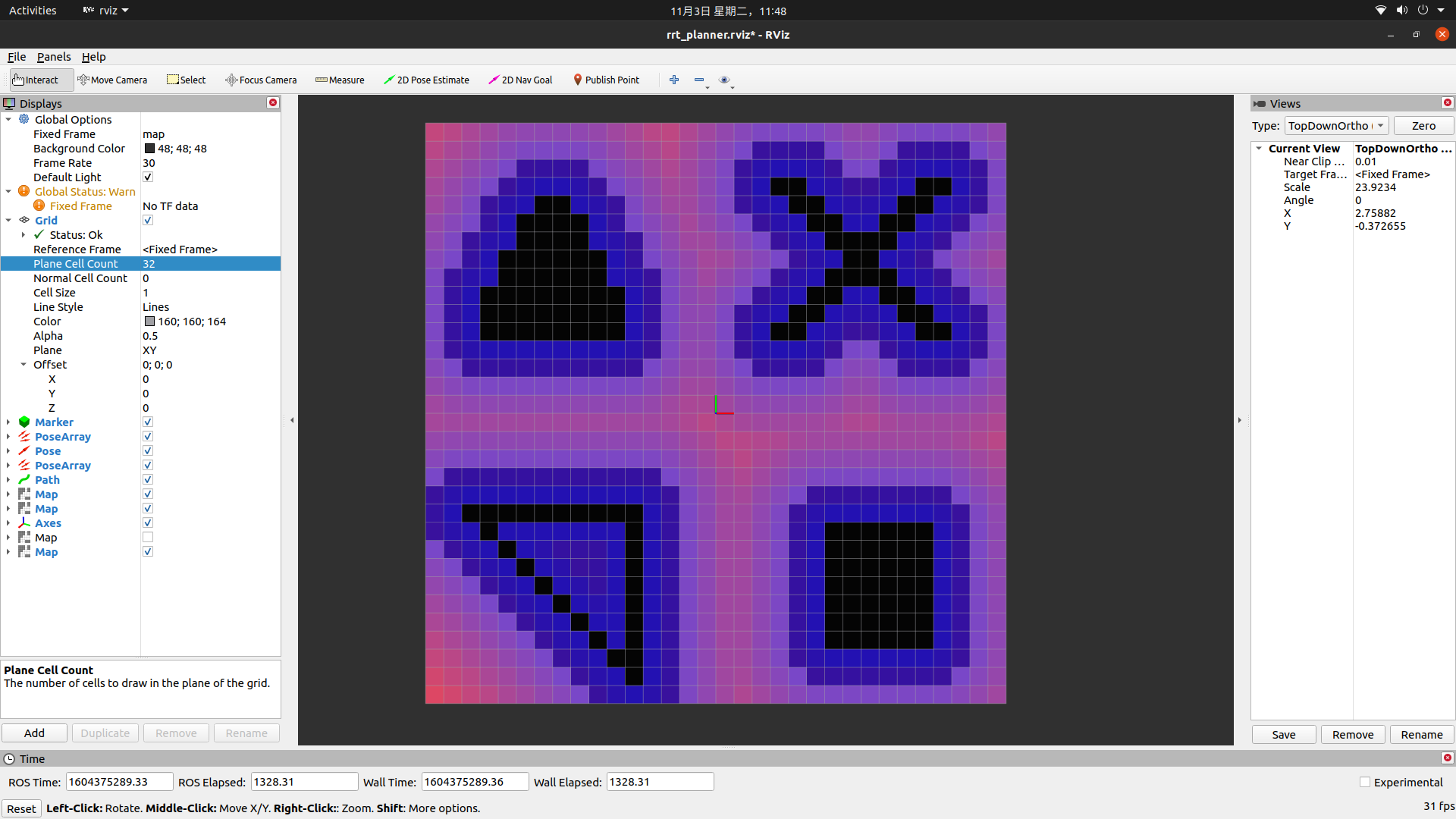
- using the map_server to load the map file
$ rosrun map_server map_server src/ros_rrt_bias/maps/map_test1.yamlin mapsfolder ,with tree test yamlfile.
this project contain some function as follow:
we use the vehicle footprint convolution with obstacle map to inflate the obstacle map.this algorithm reference the "Fast Collision Checking for Intelligent Vehicle Motion Planning"article.
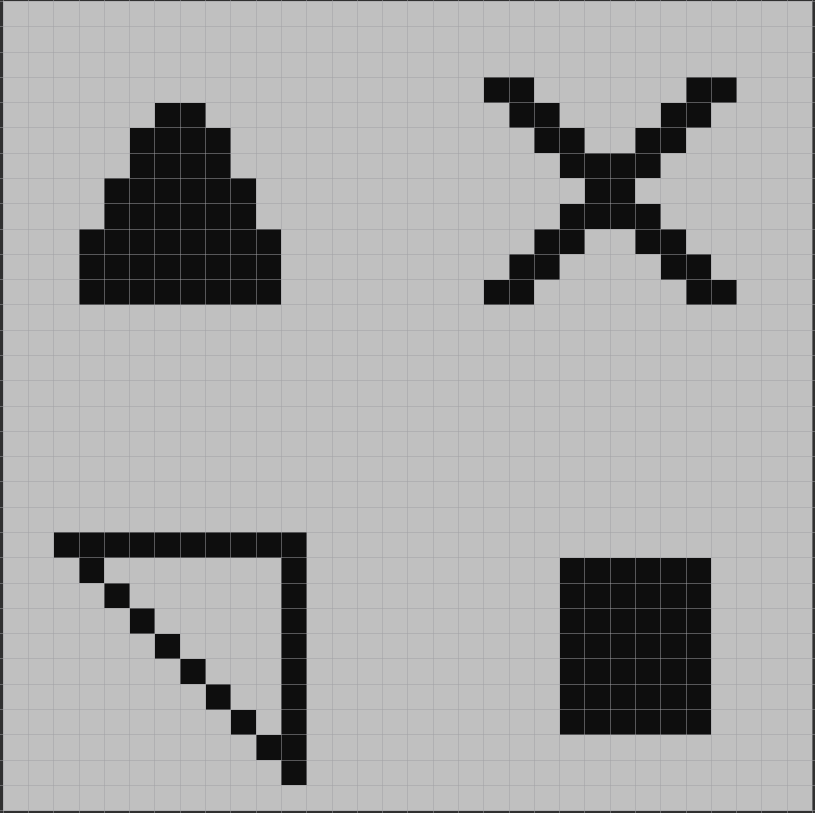
- the kernel picture as follow:
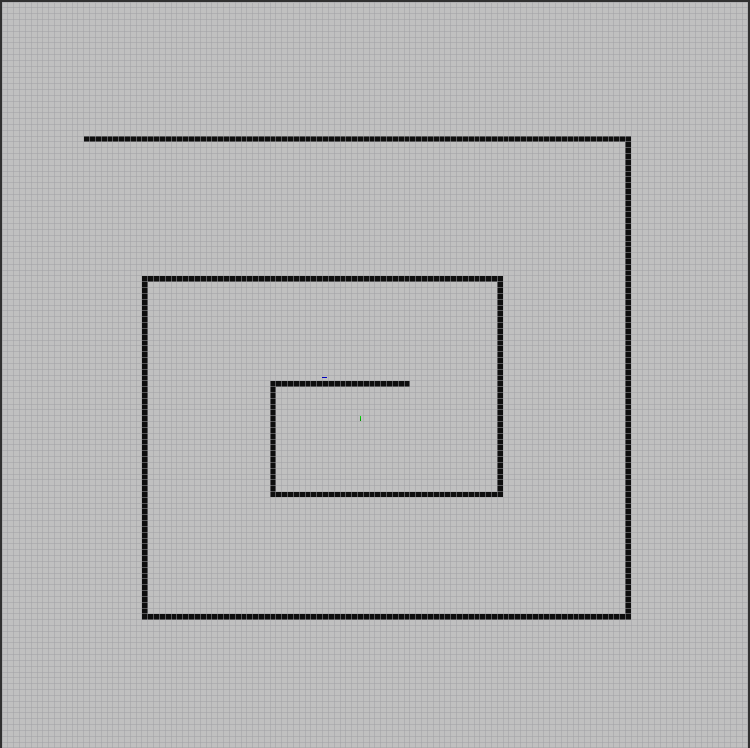
- the obstacle map as follows:
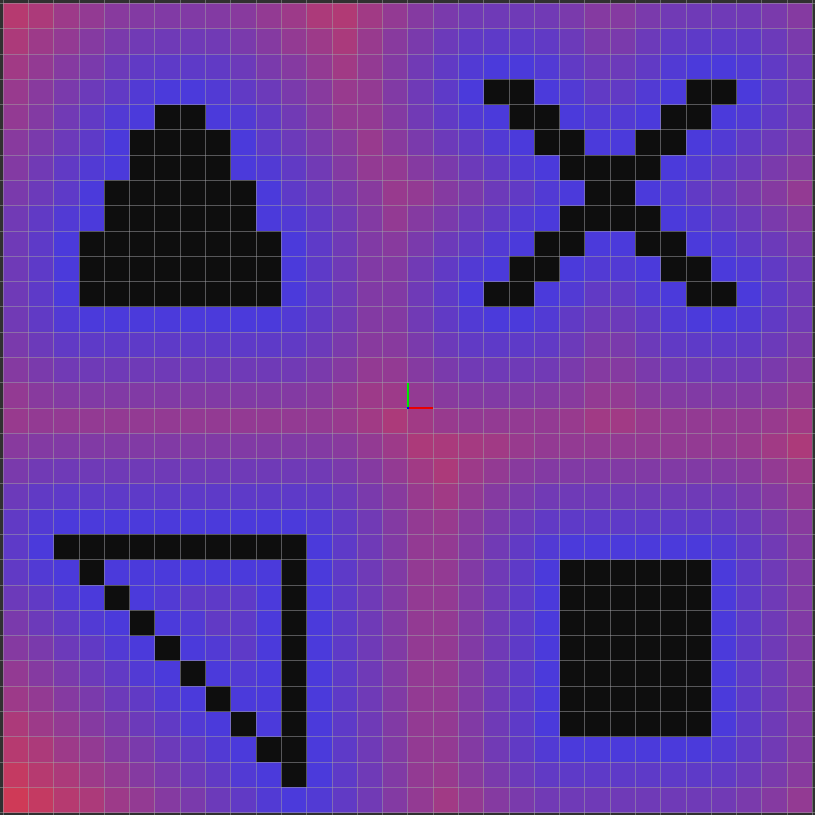
- the convolution of two picture as follows:
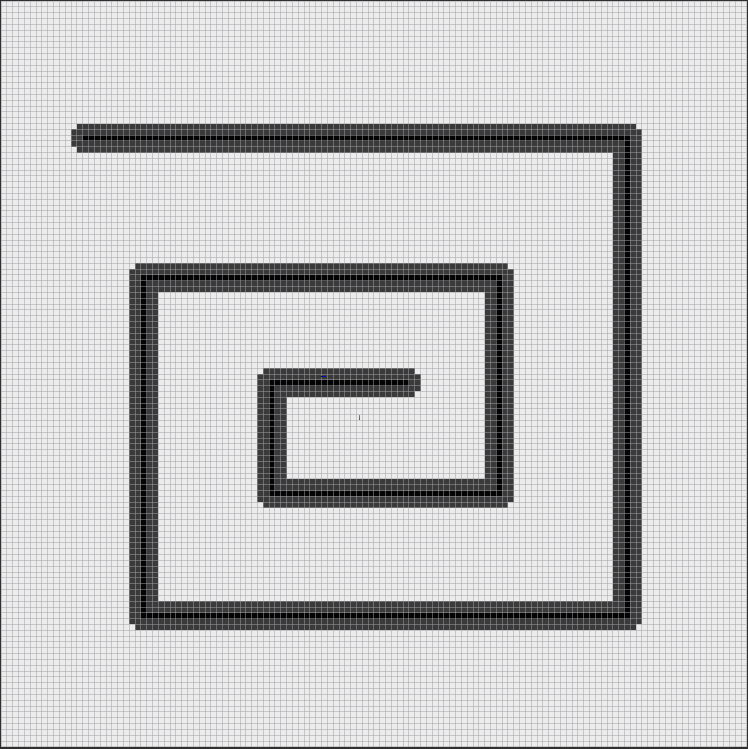
the grip map as follow:
- using the way of "Fast 2-D Distance Transformations"paper ,calculate the distance map as follow:
the relative-coordinates threshold set to zero.