![]()
The Robotics Middleware Framework (RMF or RoMi-H) allows for interoperability among heterogeneous robot fleets while managing robot traffic that is sharing resources such as space, building infrastructure systems (lifts, doors, etc) and other automation systems within the same facility. RMF also handles task allocation and conflict resolution (de-conflicting traffic lanes and other resources). These capabilities are provided by various libraries in the rmf_core.
This repository contains demonstrations of the above mentioned capabilities of RMF. It serves as a starting point for working and integrating with RMF.
Note: The entire RMF ecosystem is still under active development, which may cause documentation, API or ABI compatibility to break.
These demos were developed and tested on
Install all non-ROS prerequisites of the packages,
sudo apt update && sudo apt install \
git cmake wget python3-vcstool \
qt5-default libeigen3-dev \
libwebsocketpp-dev \
libboost-all-dev curl \
python3-shapely python3-yamlSetup a new ROS 2 workspace and pull in all the required repositories using vcs,
mkdir -p ~/rmf_demos_ws/src
cd ~/rmf_demos_ws
wget https://raw.githubusercontent.com/osrf/rmf_demos/master/rmf_demos.repos
vcs import src < rmf_demos.reposEnsure all ROS prerequisites are fulfilled,
cd ~/rmf_demos_ws
rosdep install --from-paths src --ignore-src --rosdistro eloquent \
-y --skip-keys "websocketpp ament_python"Some of the demos might refer to open source gazebo models hosted here. To avoid any race conditions and errors where gazebo downloads all models when launched, optionally, a local copy of all the open source models can be downloaded and saved manually like so,
cd ~/.
git clone https://github.com/osrf/gazebo_models
cd gazebo_models
cp -r ./* ~/.gazebo/models/.Source ROS 2 Eloquent and build,
cd ~/rmf_demos_ws
source /opt/ros/eloquent/setup.bash
colcon buildAnswers to frequently asked questions can be found here.
An indoor office environemnt for robots to navigate around. It includes a beverage dispensing station, controllable doors and laneways which are integrated into RMF.
source ~/rmf_demos_ws/install/setup.bash
ros2 launch demos office.launch.xmlTo simulate a delivery
Click the Request Delivery button in the RViz RMF Panel or
source ~/rmf_demos_ws/install/setup.bash
ros2 run rmf_demo_tasks request_delivery 
To request each of the Magni robots to loop between two points,
Click the Request Loop button in the RViz RMF Panel or
source ~/rmf_demos_ws/install/setup.bash
ros2 launch demos office_loop.launch.xml
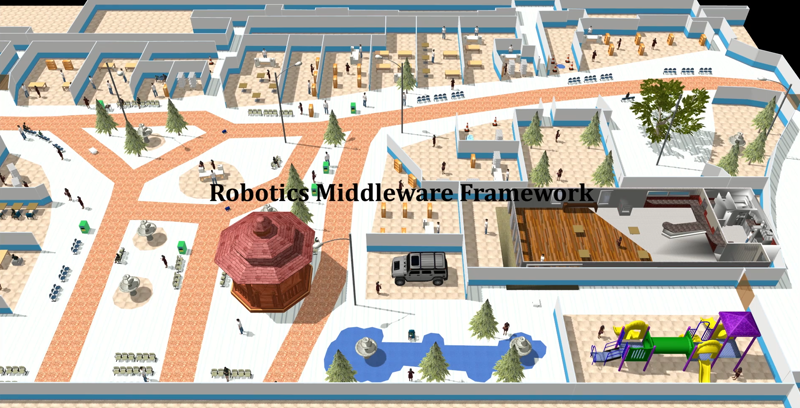
This demo world shows robot interaction on a much larger map, with a lot more lanes, destinations, robots and possible interactions between robots from different fleets, robots and infrastructure, as well as robots and users. In the illustrations below, from top to bottom we have how the world looks like in traffic_editor, the schedule visualizer in rviz, and the full simulation in gazebo,


To launch the world and the schedule visualizer,
source ~/rmf_demos_ws/install/setup.bash
ros2 launch demos airport_terminal.launch.xmlTo run a scenario where multiple robots are issued task orders,
source ~/rmf_demos_ws/install/setup.bash
ros2 run demos airport_terminal_scenario.shThis command spawns 2 mir100 and 4 magni robots in the map. Out of these 1 mir100 and 2 magni robots are issued loop request tasks. The other robots are idle and can be issued loop or delivery reqeust tasks via the RMF Panel.
Non-autonomous vehicles can also be integrated with RMF provided their positions can be localized in the world. This may be of value at facilities where space is shared by autonomous robots as well as manually operated vechiles such as forklifts or transporters. In this demo, we can introduce a vehicle (caddy) which can be driven around through keyboard/joystick teleop. In RMF nomenclature, this vehicle is classified as a read_only type, ie, RMF can only infer its position in the world but does not have control over its motion. Here, the goal is to have other controllable robots avoid this vechile's path by replanning their routes if needed. The model is fitted with a plugin which generates a prediction of the vehicle's path based on its current heading. It is configured to occupy the same lanes as the magni robots. Here, a read_only_fleet_adapter submits the prediction from the plugin to the RMF schedule.
To spawn the caddy into the world,
source ~/rmf_demos_ws/install/setup.bash
ros2 launch demos airport_terminal_caddy.launch.xml
Alternatively, to spawn all the robots without issuing any task orders,
source ~/rmf_demos_ws/install/setup.bash
ros2 run demos airport_terminal_spawn_robots.sh