Task Description: please refer to ./docs/ME5413_Final_Project.pdf.
Demo:

For the insturcitons of the original simulation environment that this project relies on, please refer to ME5413_Final_Project-Github.
If you have any questions, please feel free to contact us: smkk00715@gmail.com
- SLAM
- Cartographer
- Fast-LIO2
- Map Fusion
- Planning and Control (PnC)
- A*
- Theta*
- DWA
- TEB
- Model Predictive Control (MPC)
- Perception: EasyOCR
- Decision and Exploration
- Finite State Machine (FSM)
- Frontier and occupancy grid map-based exploration
- Pipeline: Highly modular, automated, and configurable
.
├── final_fsm # Finite State Machine package
├── final_percep # Perception package
├── final_pnc # Navigation package
├── final_slam # SLAM package
├── interactive_tools # Interactive tools for rviz
├── jackal # Jackal package
├── jackal_description # Modified Jackal model package
├── me5413_world # Gazebo simulation package
└── third_party # Third-party packages. We have modified or tailored some of them.- Ubuntu 20.04
- ROS Noetic
- C++11 and above
sudo apt install ros-noetic-rviz-imu-plugin ros-noetic-move-base ros-noetic-navfn tmux python3-catkin-tools python3-wstool python3-rosdep ninja-build stow ffmpeg
python -m pip install Pillow markupsafe==1.1.1 ipdb-
Some useful commands
In your
.bashrcor.zshrcfile, add the following lines:alias rosk='rosnode kill -a ; killall -9 roscore rosmaster gzserver gazebo rviz ; kill -9 $(pgrep -f rqt)' # kill all ROS processes immediately alias gazebok="pkill -P $(pgrep -f gazebo.launch) ; pkill -9 gzserver ; pkill -9 gzclient" # kill gazebo immediately alias rqtg="rosrun rqt_graph rqt_graph" alias rqttf="rosrun rqt_tf_tree rqt_tf_tree" alias rqtrecon="rosrun rqt_reconfigure rqt_reconfigure"
mkdir ~/me5413_final_ws/ && cd ~/me5413_final_ws/
git clone https://github.com/brian00715/Autonomous-Robot-Navigation src
catkin config -DPYTHON_EXECUTABLE=/usr/bin/python3 -DCMAKE_BUILD_TYPE=RelWithDebInfo
# package ros dependencies
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -ySomeone may encounter the issue that the RViz runs extremely slow when visualizing the point cloud. To accelerate the point cloud processing, you can edit the Velodyne description file:
roscd velodyne_description/urdfOpen the VLP-16.urdf.xacro and HDL-32E.urdf.xacro, change the gpu:=false to gpu:=true on line 4.
Please install conda first.
conda create -n me5413 python=3.8
conda activate me5413
conda install pytorch==2.1.1 torchvision==0.16.1 pytorch-cuda=12.1 -c pytorch -c nvidia
conda install -c conda-forge opencv rosdep rospkg easyocr decorator pexpect numpy defusedxml ipdb
export PYTHONPATH=$PYTHONPATH:/usr/lib/python3.8/dist-packagesNote: You can choose to install the relied SLAM packages. No need to install all of them.
Please open a terminal in your workspace and execute the following commands to install Cartographer.
-
Install Abseil-cpp Library
Cartographer requires the
abseil-cpplibrary, which needs to be manually installed using the provided script. Run theinstall_abseil.shscript:~/me5413_final_ws/src/third_party/cartographer/cartographer/scripts/install_abseil.sh -
Build and Install:
catkin build cartographer*
Fast-LIO relies on Livox-SDK and livox_ros_driver, please satisify prerequisites first before compile Fast-LIO.
For Ubuntu 18.04 or higher, with ROS >= Melodic, the default PCL and Eigen is enough for FAST-LIO to work normally.
-
Livox-SDK
Livox SDKis the software development kit designed for all Livox products and required by Fast-LIO. To install and compile the SDK, please follow:cd ~/me5413_final_ws/src/third_party/Livox-SDK cd build && cmake .. make -j sudo make install
-
livox_ros_driver
livox_ros_driveris a ROS package used to connect LiDAR products produced by Livox, and is necessary for Fast-LIO. This package can be compiled by runningcd ~/me5413_final_ws catkin build livox_ros_driver
-
Build
If all the prerequisites are satisfied, Fast-LIO can be easily complied by running
cd ~/me5413_final_ws catkin build fast_lio
Note: the SLAM packages should be built before this step.
catkin build final_slam final_pnc final_percep final_fsm jackal* interactive_tools me5413_world
echo "source ~/me5413_final_ws/devel/setup.bash" >> ~/.bashrcNote: please confirm the conda environment and Cartographer have already been installed and built scuccessfully before running the one-click launch.
rosrun final_fsm start.sh
rosrun final_fsm start.sh -e -r # enable EKF and enable screen recordingexport ENABLE_EKF=false # set to false means using the ground truth odometry, otherwise the EKF odometry fusing IMU the wheel odometry
roslaunch me5413_world me5413_world.launch-
Cartographer
roslaunch final_slam mapping_carto.launch # default Mapping configuration roslaunch final_slam mapping_carto_2d.launch # 2D Cartographer Mapping roslaunch final_slam mapping_carto_3d.launch # 3D Cartographer Mapping
An example of mapping by 2D Cartographer is shown as follows:
-
Fast-LIO
source ~/me5413_final_ws/devel/setup.bash roslaunch final_slam mapping_fast_lio.launch
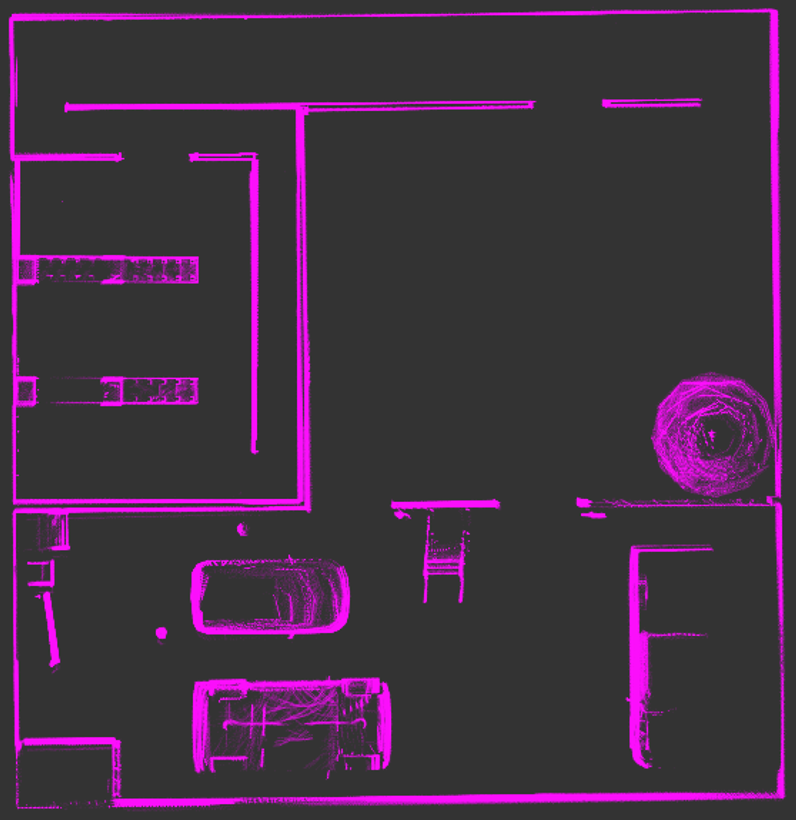
An example of point cloud by FastLIO is shown as follows:
-
Point Cloud to Map
After mapping with Fast-LIO, we offer a ROS package called
pcd2pgmto convert the.pcdfiles generated by Fast-Lio (located insrc/third_party/FAST_LIO/PCD) into standard.pgmmap files. To compile this package, please execute:cd ~/me5413_final_ws catkin build pcd2pgm
To generate the map, run the following command:
source ~/me5413_final_ws/devel/setup.bash roslaunch pcd2pgm pcd2pgm.launch
After seeing 'data size =' displayed in the terminal, open a new terminal in your map folder and execute:
rosrun map_server map_saver
Then you can obtain the
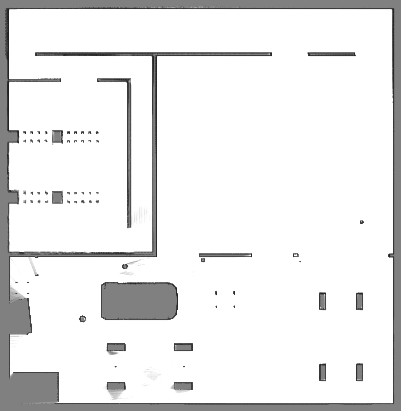
.pgmmap file. An example is shown as follows: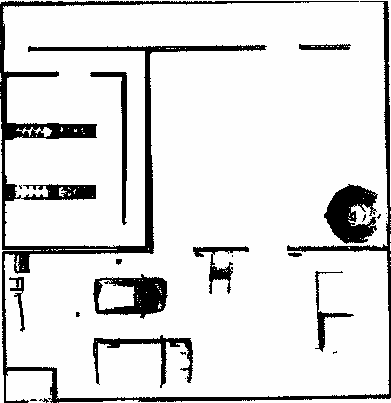
-
-
Map Fusion
To fully utilize the maps generated both by Cartographer and Fast-LIO, we provide a simple Python script that uses image processing methods to fuse these two high-quality maps into one. To perform this, execute:
cd ~/me5413_final_ws/src/final_slam/scripts chmod +x map_fusion.py python3 map_fusion
You will obtain the fused map named
fusion_map.pgminfinal_slam/maps. The result is shown as follows: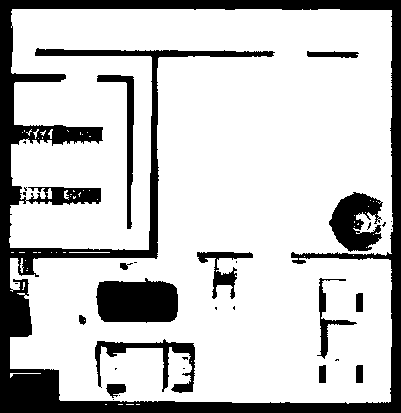




roslaunch final_slam localization_carto.launch # cartographer by default-
With Gazebo, cartographer, and navigation
rosrun final_pnc debug.sh
-
Only navigation
roslaunch final_pnc pnc.launch
roslaunch final_fsm fsm.launchTo change to map used for localization, modify the map_file parameter in final_slam/launch/localization_carto.launch.
You can choose which global planner or local planner to use in final_pnc/launch/pnc.launch.
Note: For the current version, if you want to use the DWA or TEB local planner, you should set arg
local_plannerto a value other thanmpc. Uncomment the corresponding local planner from lines 40-47 and comment out lines 49-50 infinal_pnc/launch/pnc.launch.
You can modify the parameters in final_pnc/config/*/*.yaml to adjust the performance. For exmaple, you can adjust the max_vel in final_pnc/config/nav_params/mpc.yaml to change the maximum velocity of MPC local planner.
We would like to thank the following open-source projects:
- ME5413_Final_Project
- Cartographer
- Fast-LIO
- ros_motion_planning
- pcd2pgm_package
- PA-DMPC-UAV-Ad-Hoc
- EasyOCR
- occ_grid_mapping