QT-LiDAR-Object-Detection
- QT (Quad-Tree Segmentation).
- Upgrade version of LiDAR-obstacle-dectection Repository.
- Realtime object recognization, using only LiDAR.
- Available for real-time self-driving systems.
- More powerful than euclidean clustering detection
- HYUNDAI i30
- Ouster OS1 64 channel LiDAR
- Intel Core i5-8250U, 3.4Ghz
- 16G RAM
- Geforce 1050GTX
- Add include files.
- Existing method did not provide minium size bounding box, but this version is providing.
- Use corvarience of points, and calculate Quaternion and Rotation information of bounding box.
- bounding box's pose has orientation values.
- if you use vector map, can change cluster size (do not generte bounding box of static objects in vectormap)
- '/detected_boxes'
- '/obb_cluster'
- '/obb_boxes'
- OBB MODE : Bounding boxes are minimum size and have orientation values
- AABB MODE : Bounding boxes are not minimun size and do not have orientation. but a little bit fast
- USE_VECTORMAP MODE : be going to add
$ roslaunch lidar_detect qt_detect_launch.launch
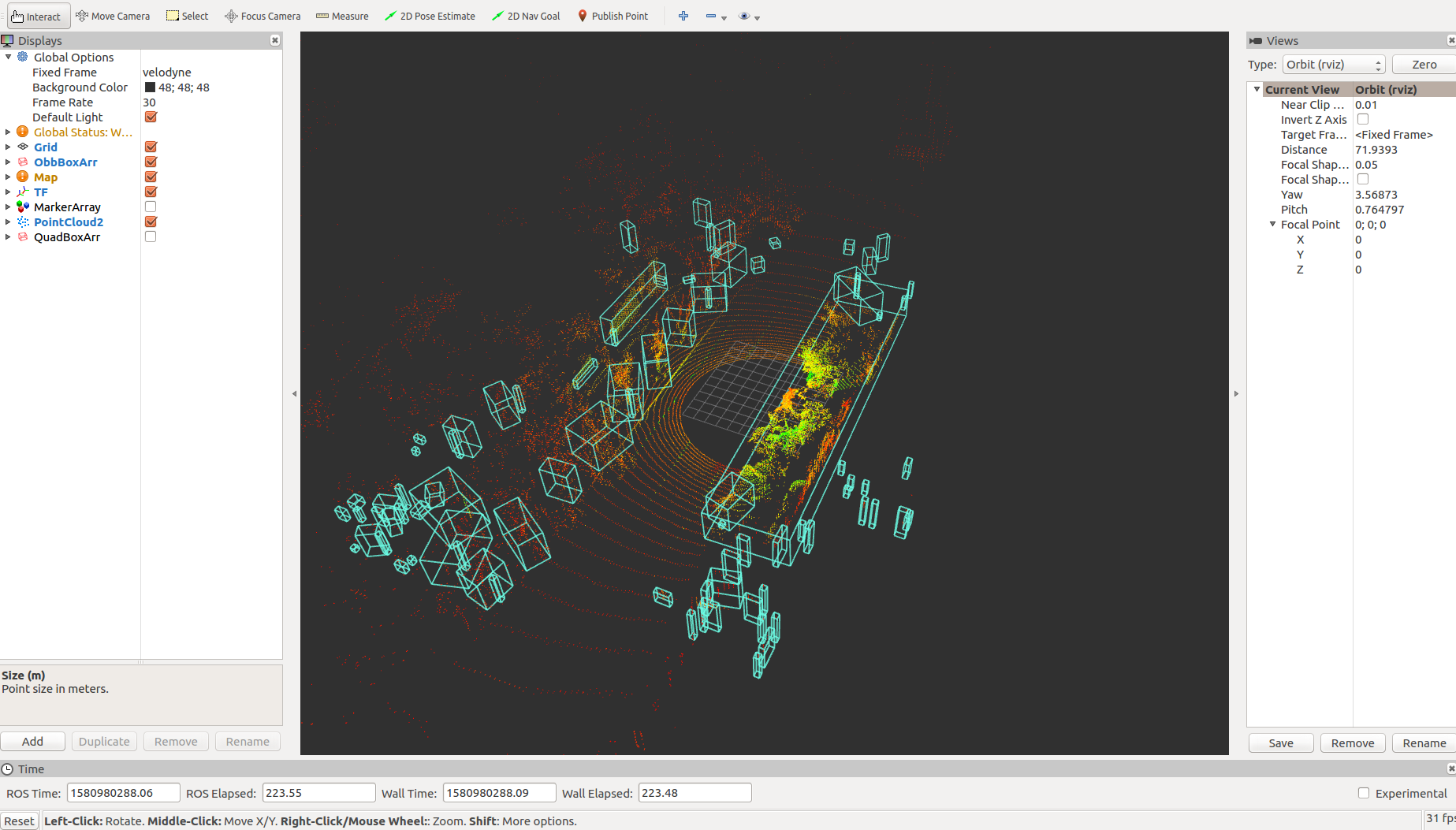
- Existing method
- no rotation
- no minimum size box
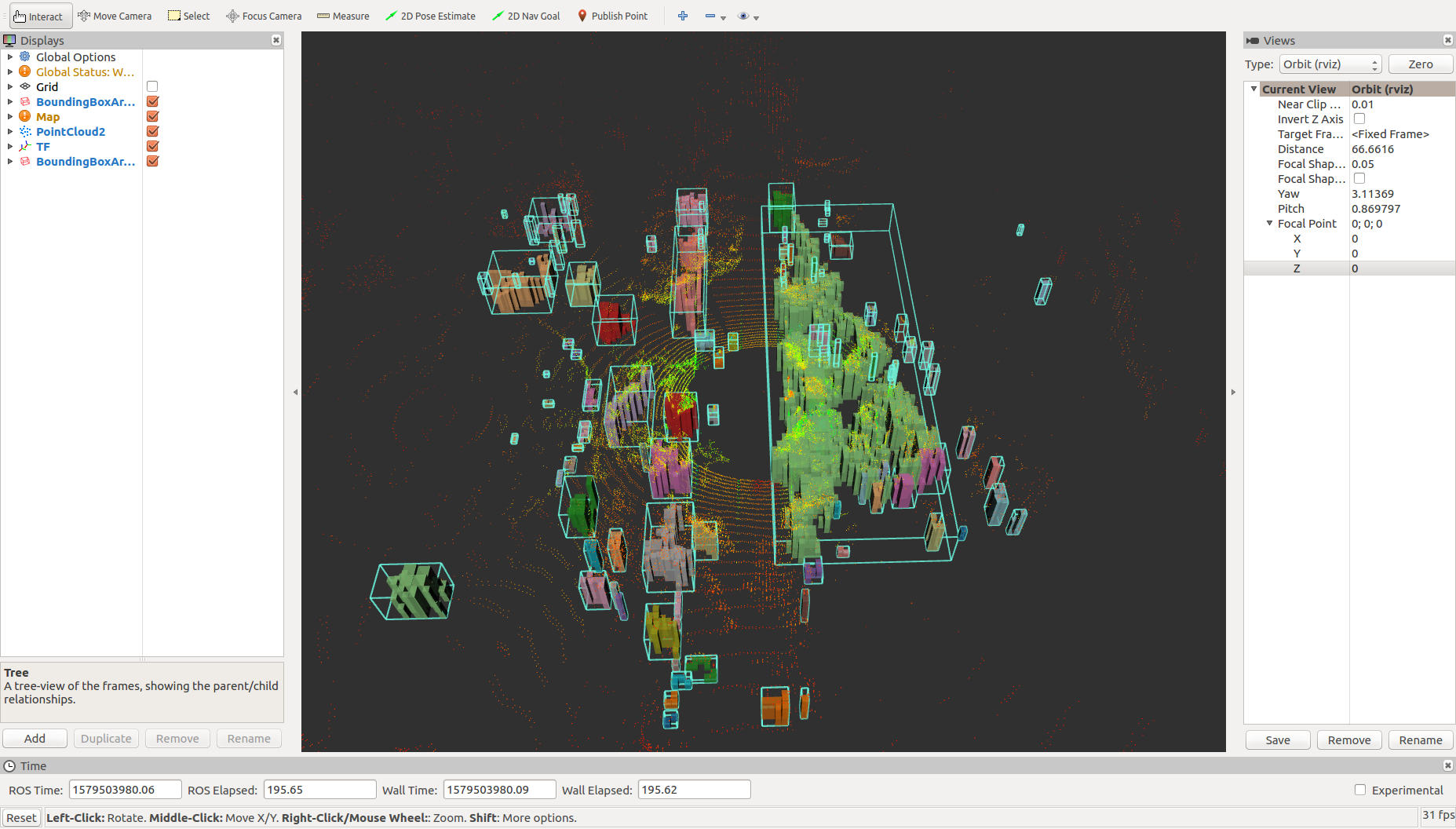
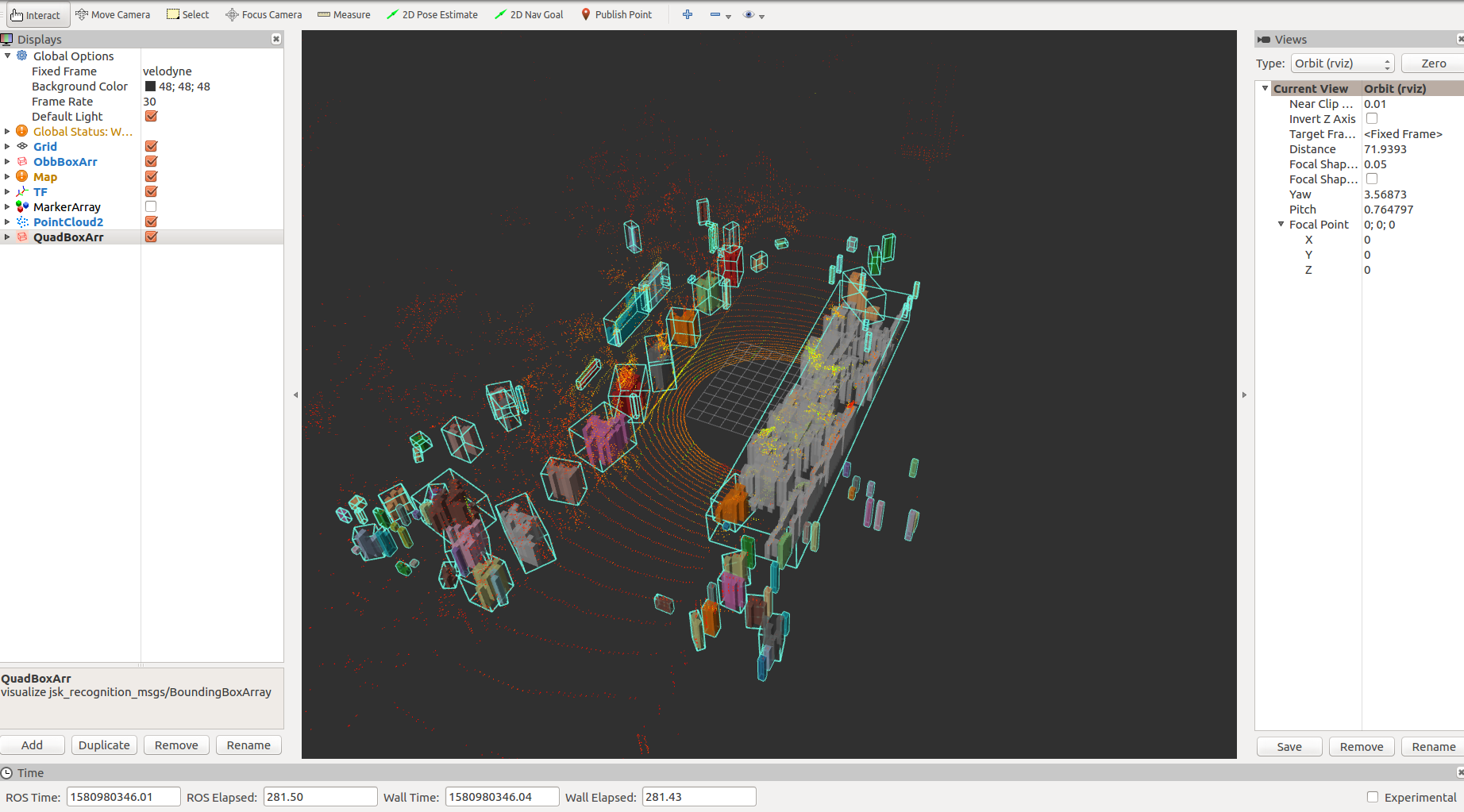
- QT-detect output
- has orientation
- minimum size box for clustering obj