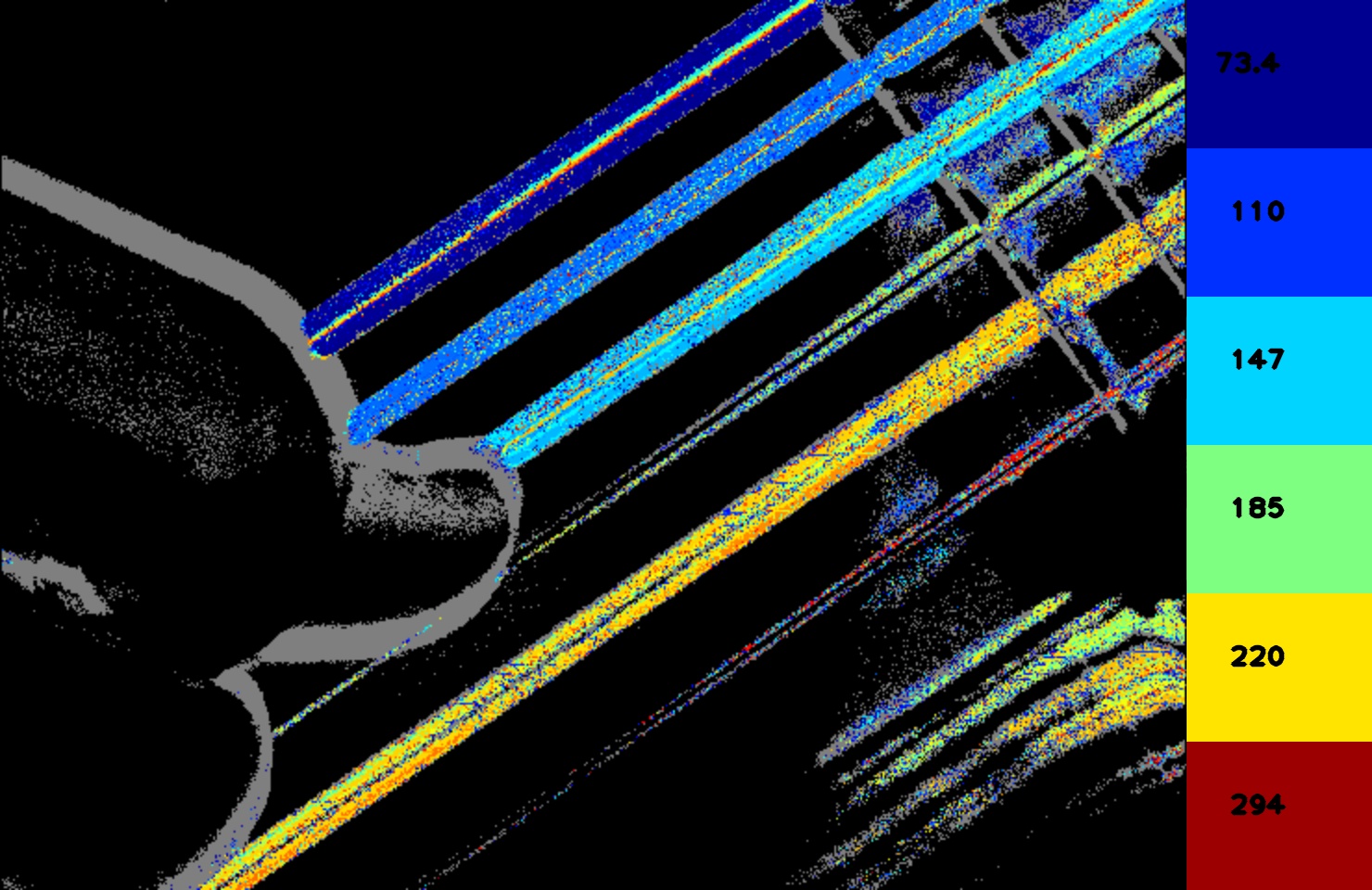
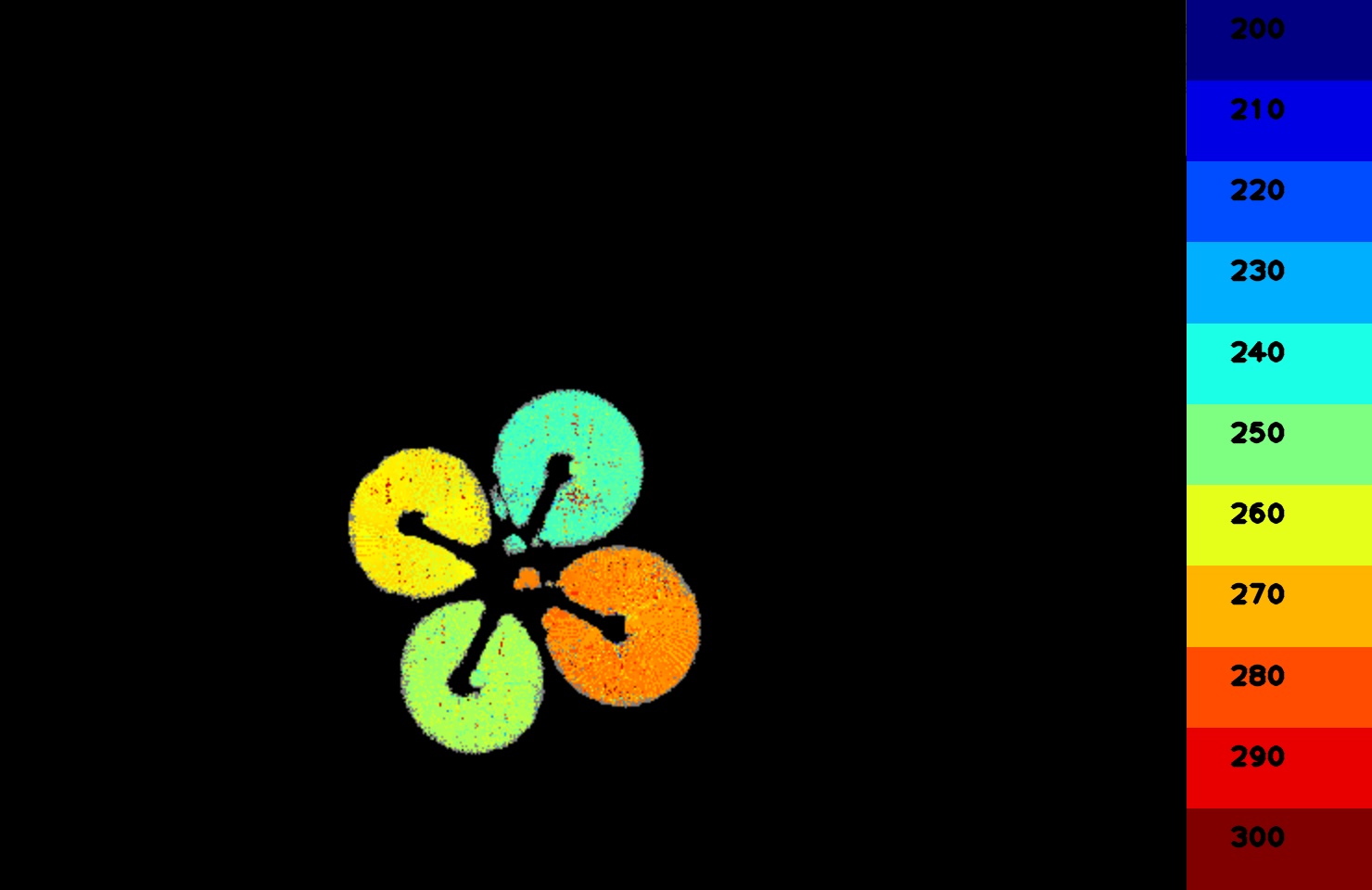
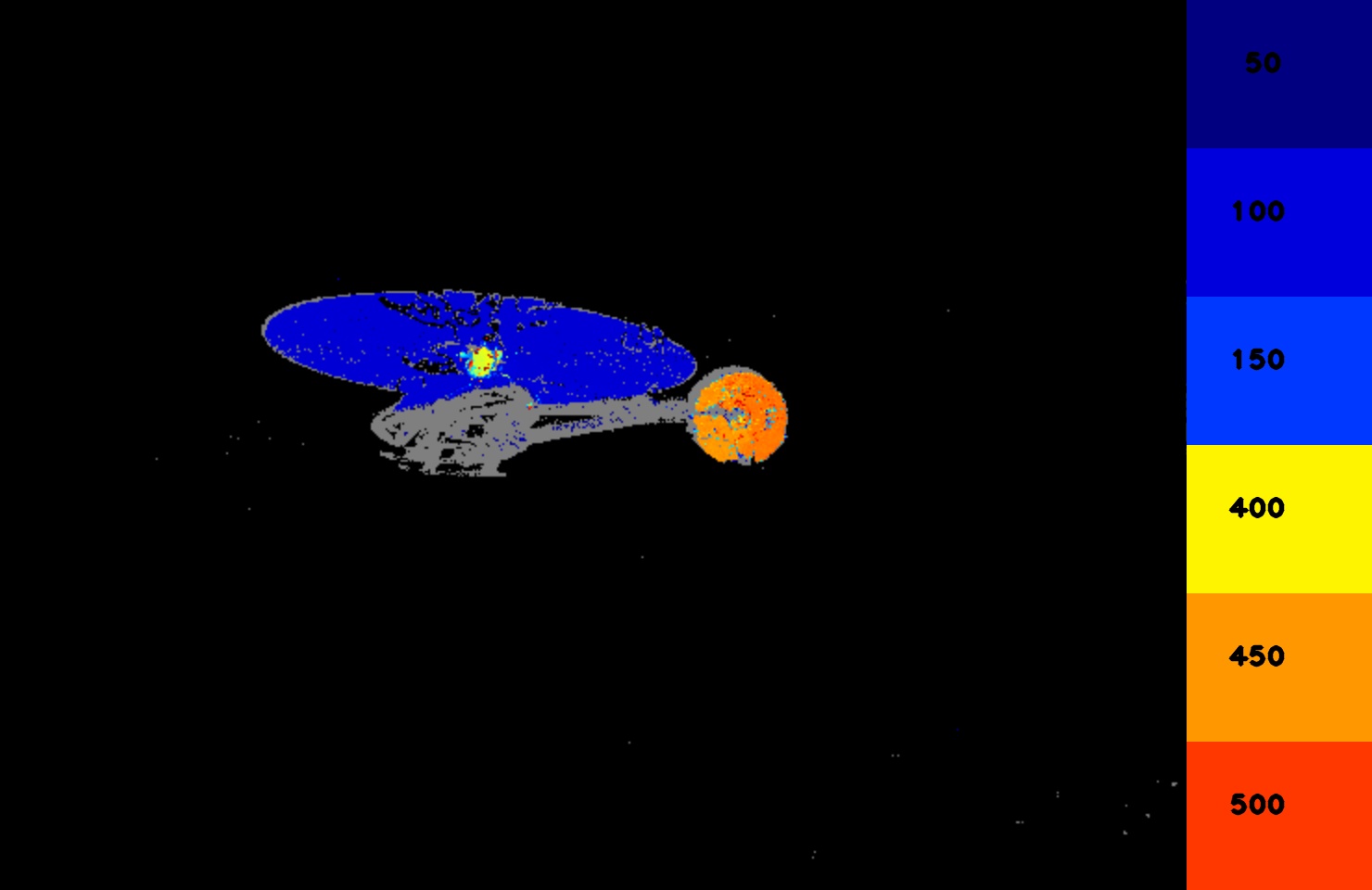
This repository has a ROS/ROS2 node for frequency analysis with event based cameras. FrequencyCam colors pixels in an image with the frequency at which their brightness changes. The end result is a "frequency image" that is very similar to Prophesee's Metavision Vibration Estimation module.
In contrast to the Metavision module, FrequencyCam is open source under a permissive (Apache2 license) and is documented. It uses an IIR digital filter to approximately reconstruct the brightness of each pixel and then measures the time it takes between zero-level crossings. For more details please refer to this paper.
Here are a few videos of FrequencyCam in action:
| guitar | quad rotor | heli |
|---|---|---|
|
 |
 |
Currently tested on Ubuntu 20.04 under ROS2 Galactic.
Create a workspace (~/ws), clone this repo, and use wstool
to pull in the remaining dependencies:
mkdir -p ~/ws/src
cd ~/ws
git clone https://github.com/berndpfrommer/frequency_cam.git src/frequency_cam
wstool init src src/frequency_cam/frequency_cam.rosinstall
# to update an existing space:
# wstool merge -t src src/frequency_cam/frequency_cam.rosinstall
# wstool update -t src
The build procedure is standard for ROS1 (catkin) and ROS2, so here is only the ROS2 syntax:
cd ~/ws
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo # (optionally add -DCMAKE_EXPORT_COMPILE_COMMANDS=1)
ros2 launch frequency_cam frequency_cam.launch.py
FrequencyCam expects ROS event_array_msgs messages from the
metavision ROS driver
here. You should be able to use other cameras (like DVS etc) by
converting the messages with a republish nodelet from the
event array tools
repository.
Input and algorithm related parameters:
min_frequency: lower bound for detected frequencymax_frequency: upper bound for detected frequencycutoff_period: number of events to use for the filter, see paper. When in doubt set to 5.0 (default).num_timeout_cycles: mark pixel inactive if it has not been updated for a time ofnum_timeout_cyclestimes pixel period (defaults to 2).use_sim_time: set this to true when playing from bag (and play bag with--clock 10000)bag_file: only supported under ROS2: play from bag file and write generated frames to disk. If no bag file is given the node subscibes to topics.
Imaging related parameters:
publishing_frequency: frequency (in Hz) at which frequency image is published (defaults to 20Hz)use_log_frequency: use log scale for frequency image coloringoverlay_events: mark pixels grey for which events have happened but no frequency could be found.legend_num_bins: how many color patches to show (defaults to 11)legend_num_sig_digits: how many significant digits to use for legend (defaults to 3).legend_frequencies: explicitly specify frequencies of color patches to show in the legend.legend_width: how many pixels wide the legend should be (defaults to 100).scale_image: factor by how much to scale up the image in resolution. Only used when playing from bag under ROS2. Useful for getting nicer fonts for numbers when running from bag for movie generation.
~/image_raw: topic under which frequency image is published.~/events: event topic to subscribe to.
This software is issued under the Apache License Version 2.0.