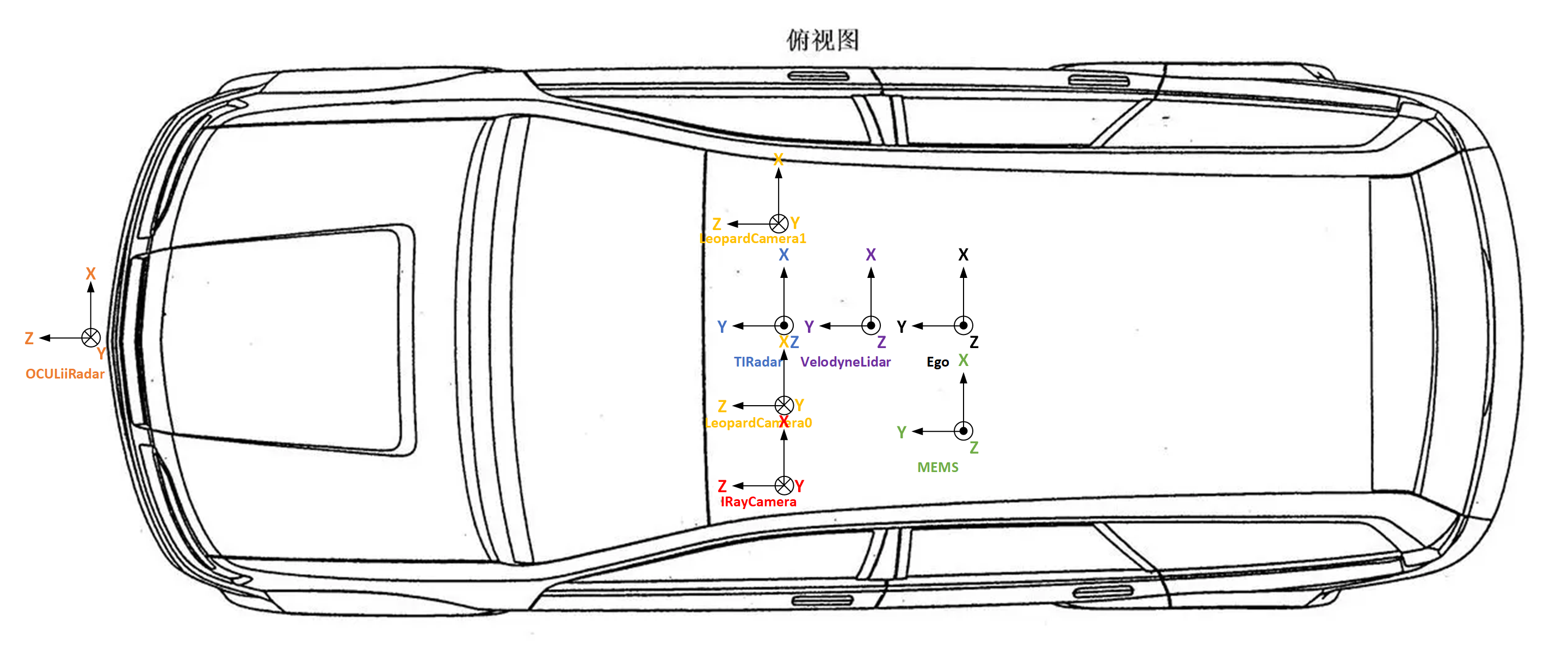
Multi-Sensors Calibration
EXP1:zhoushan_20221217_20221221
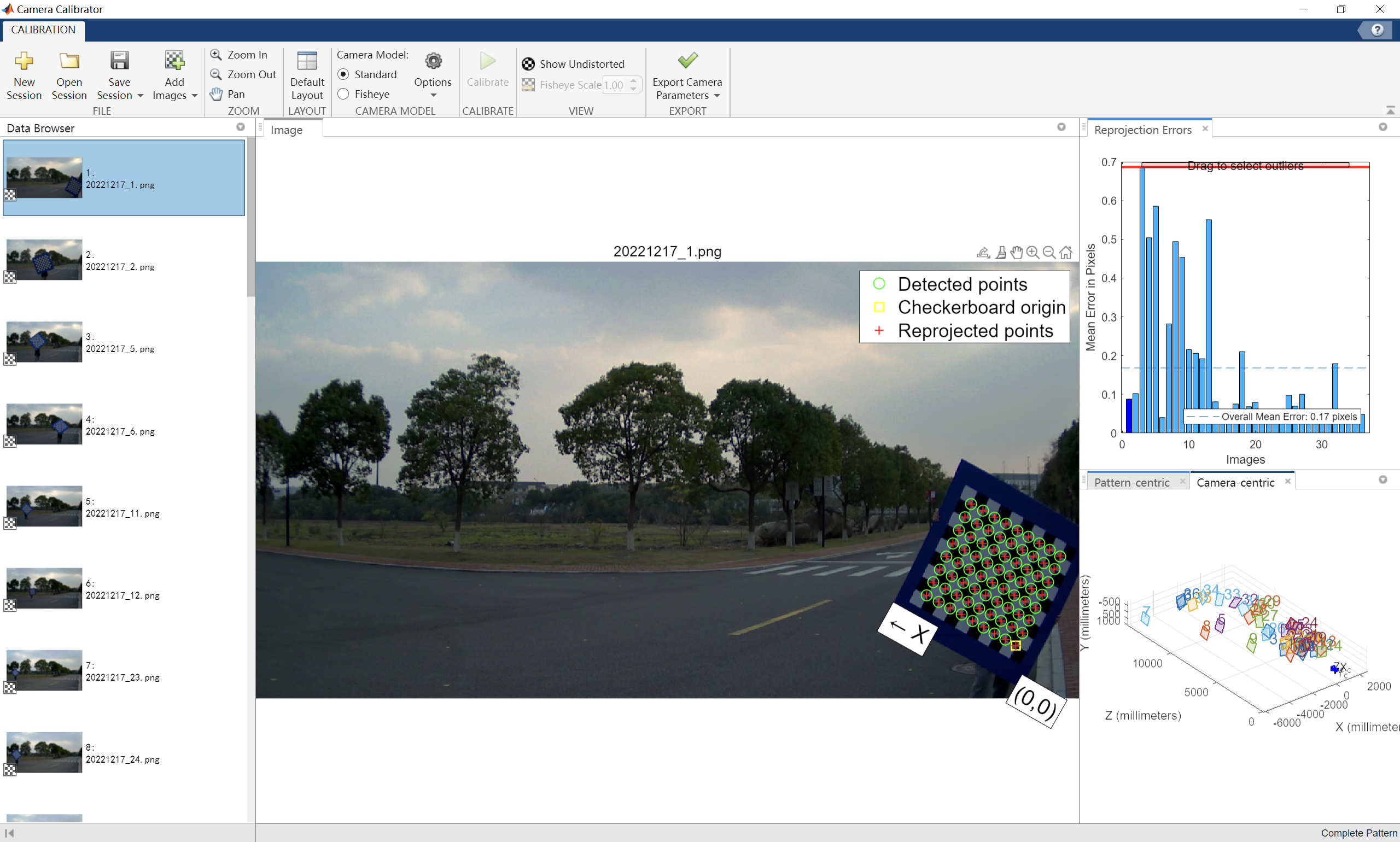
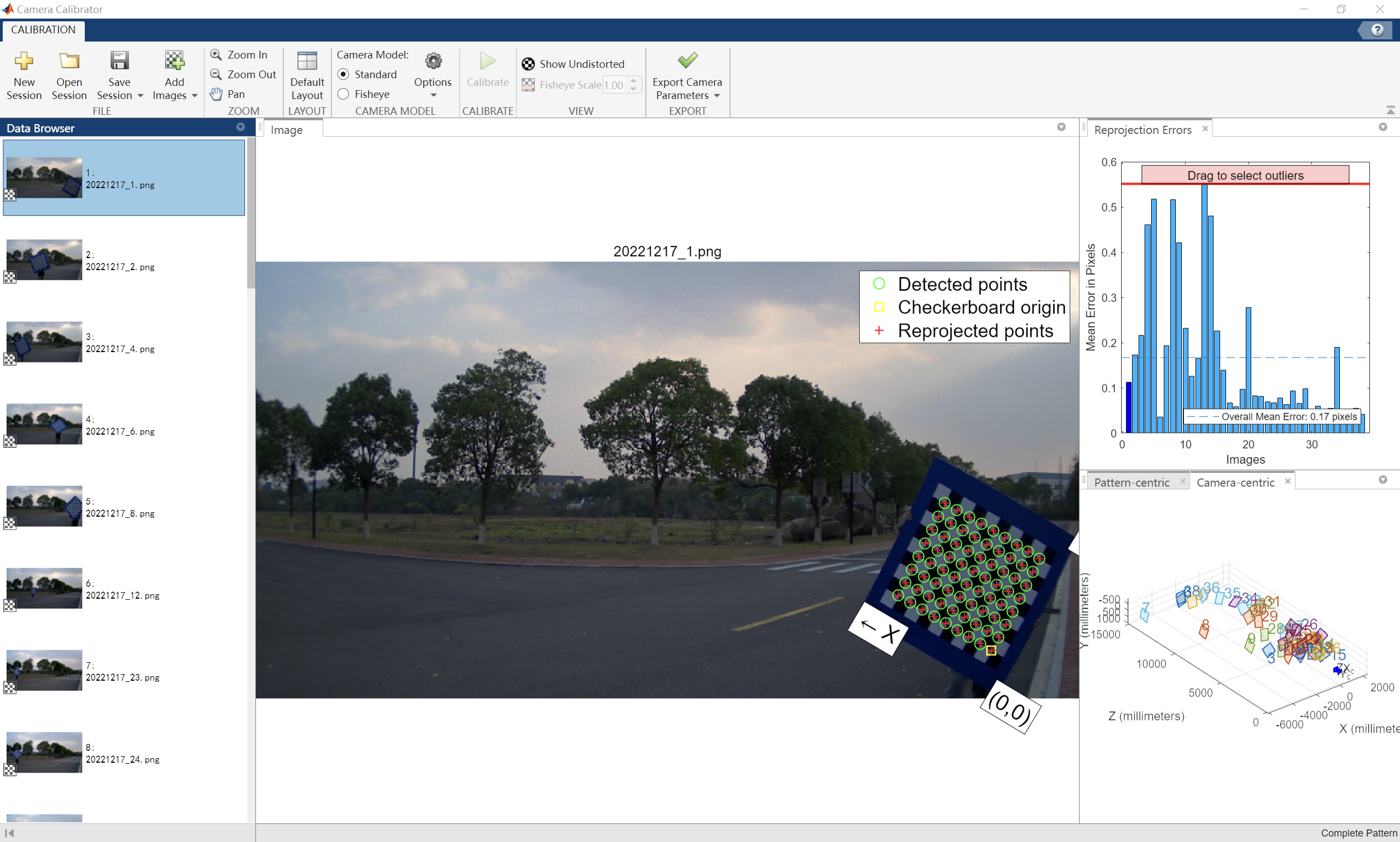
Camera Calibration Toolbox for Matlab
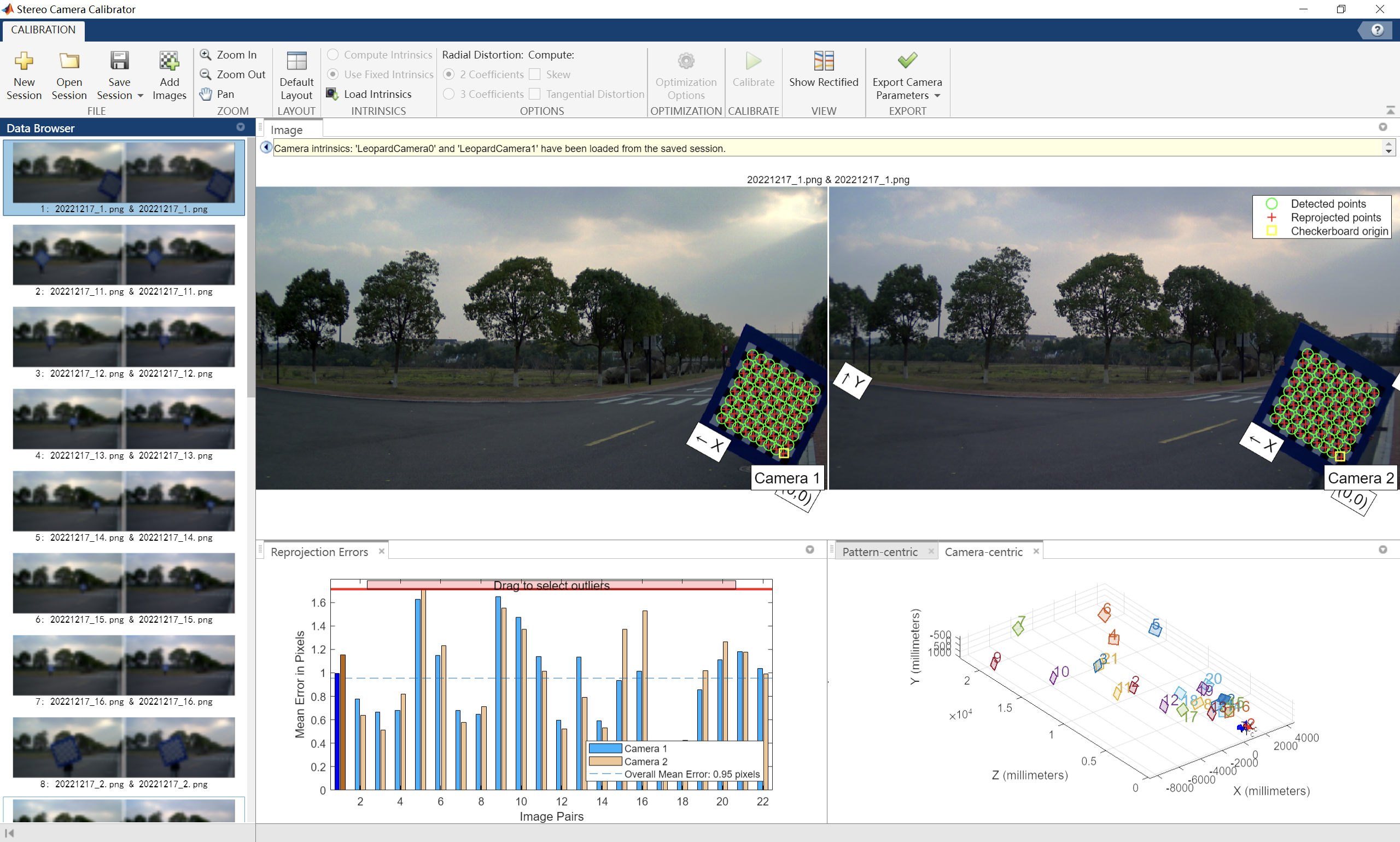
Stereo Camera Cailbrator for Matlab
LeopardCamera1_to_LeopardCamera0_extrinsic
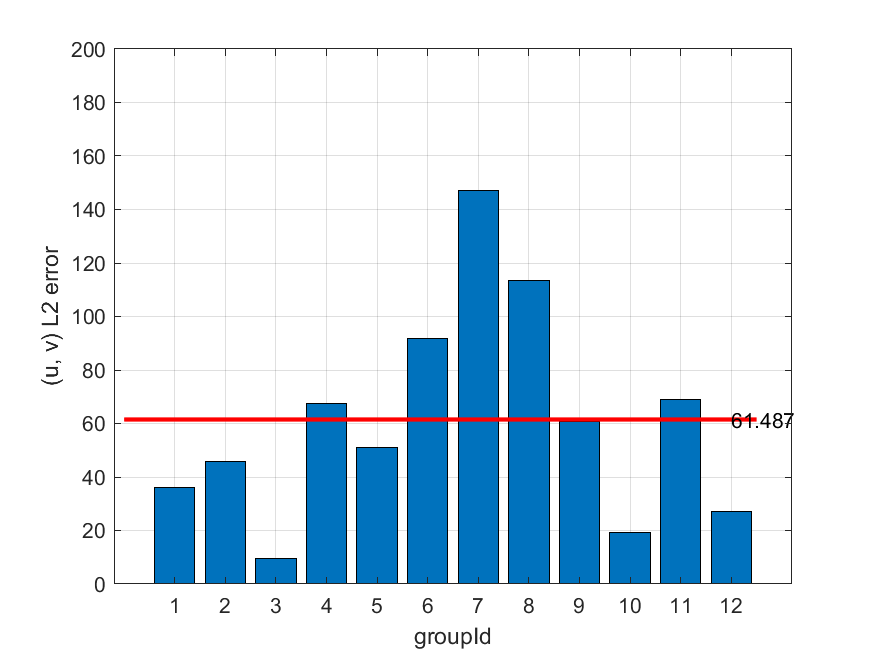
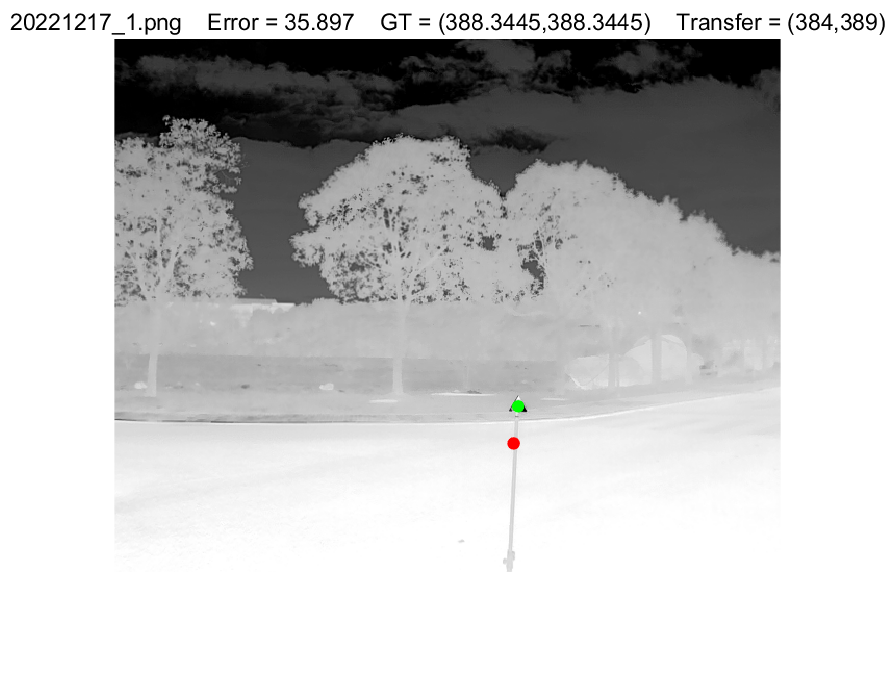
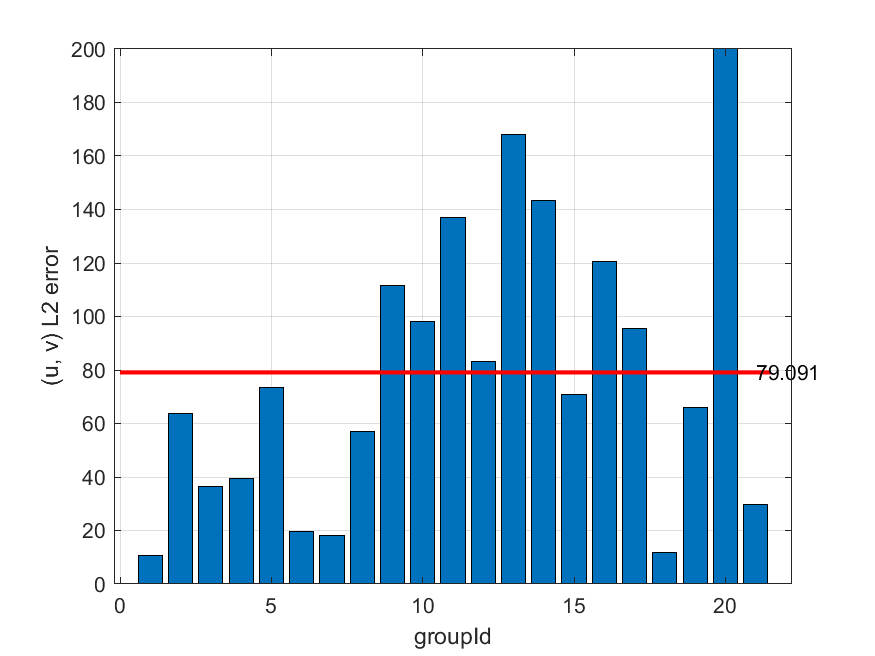
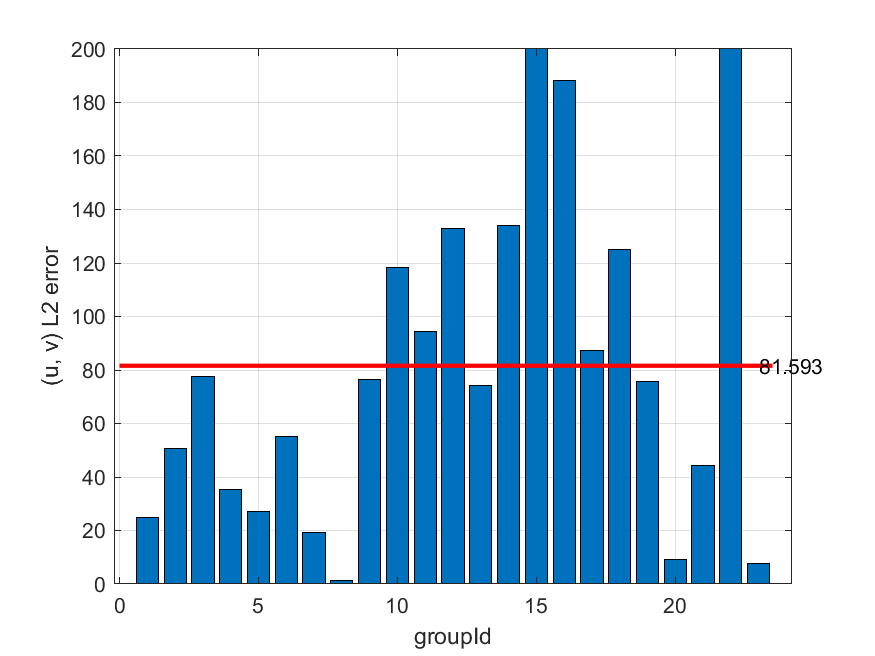
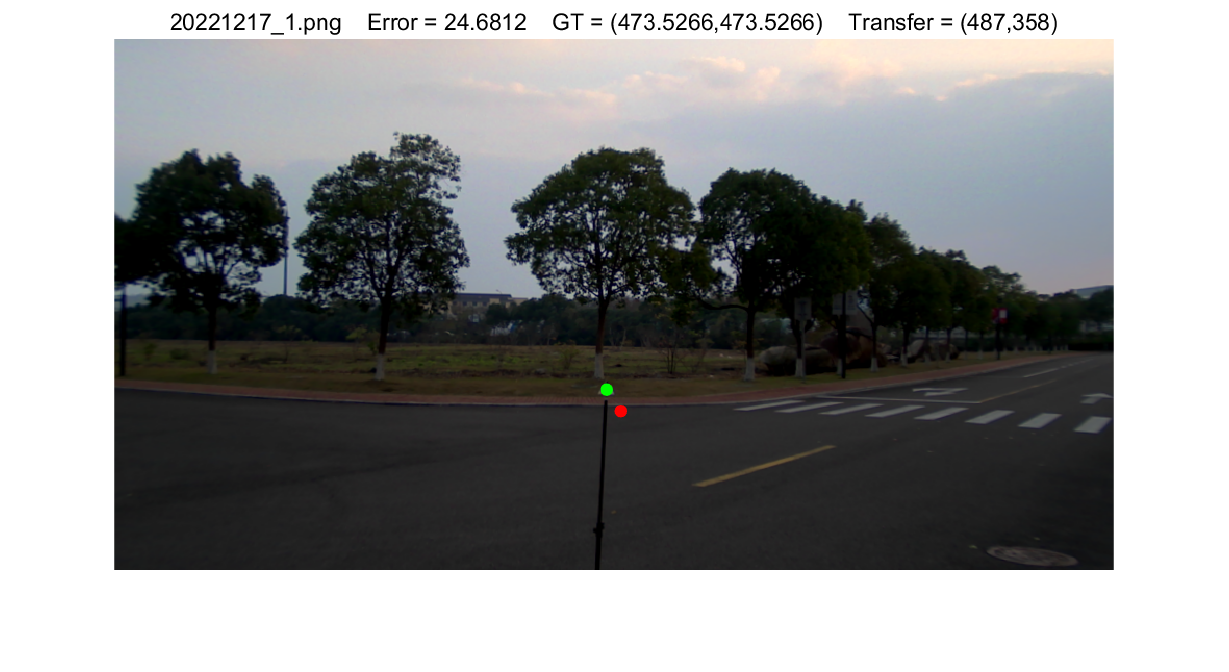
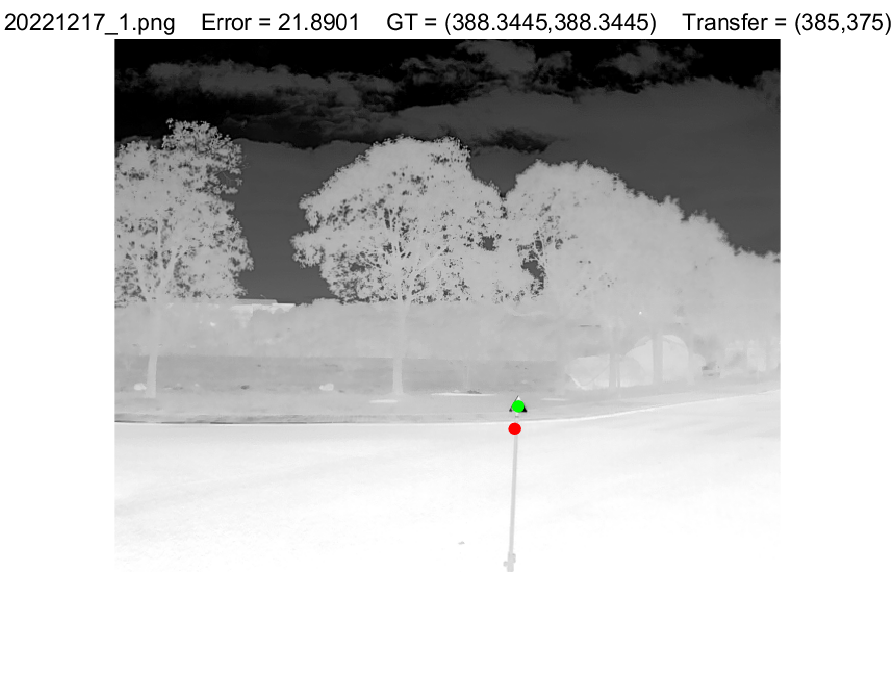
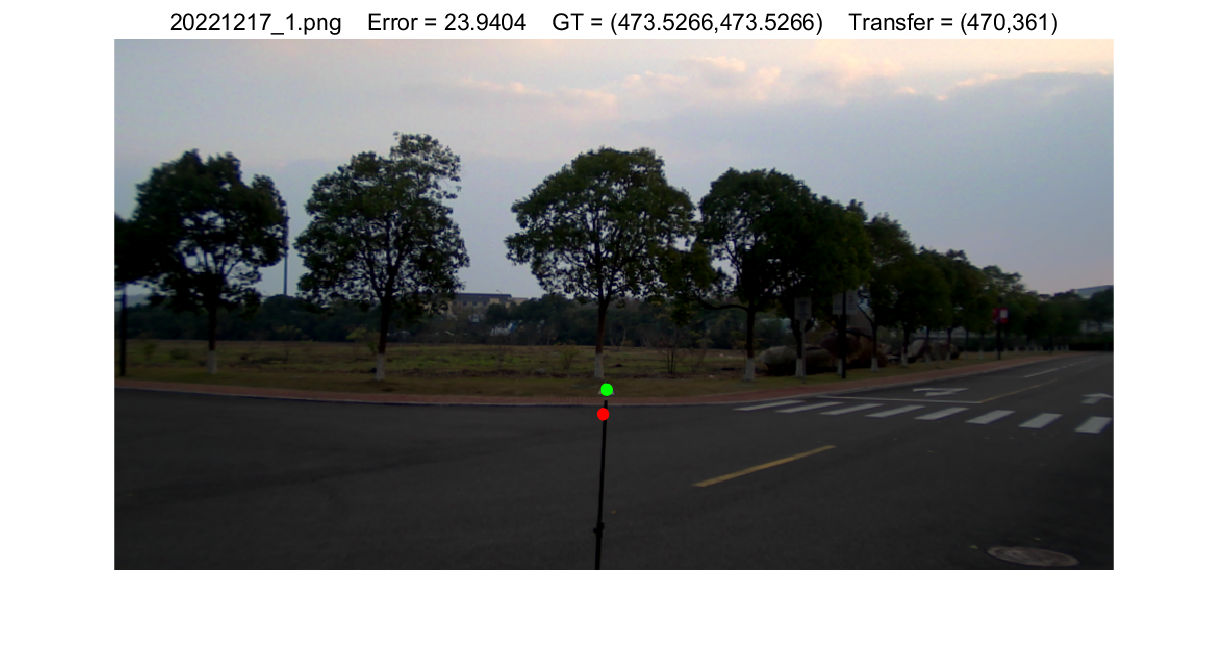
OCULiiRadar_to_camera_extrinsic
use L-M optimization algorithm
at present, the vertical direction error is large, other methods will follow
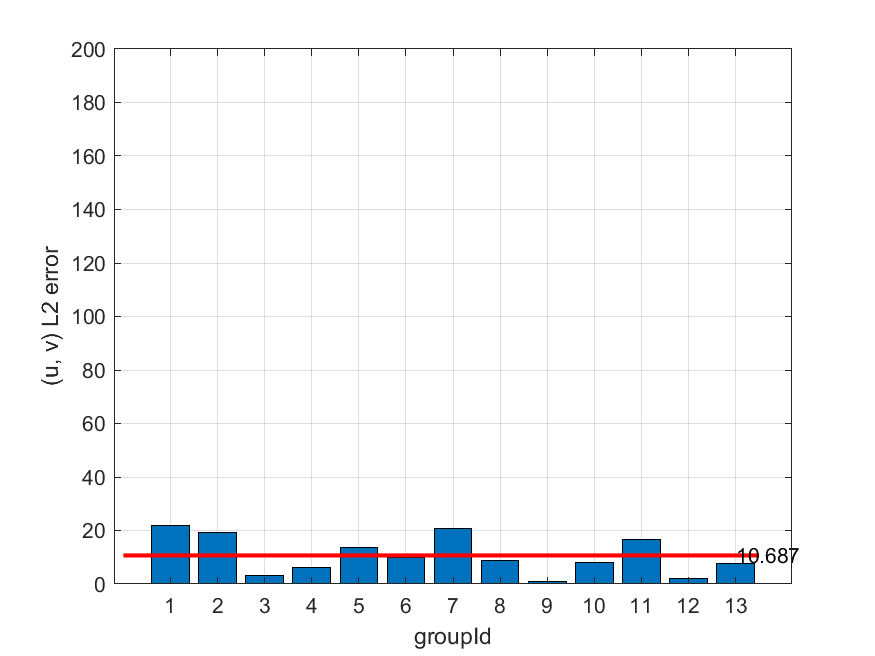
OCULiiRadar_to_IRayCamera_extrinsic
OCULiiRadar_to_LeopardCamera0_extrinsic

OCULiiRadar_to_LeopardCamera1_extrinsic
use TI mmwave cascade example codes
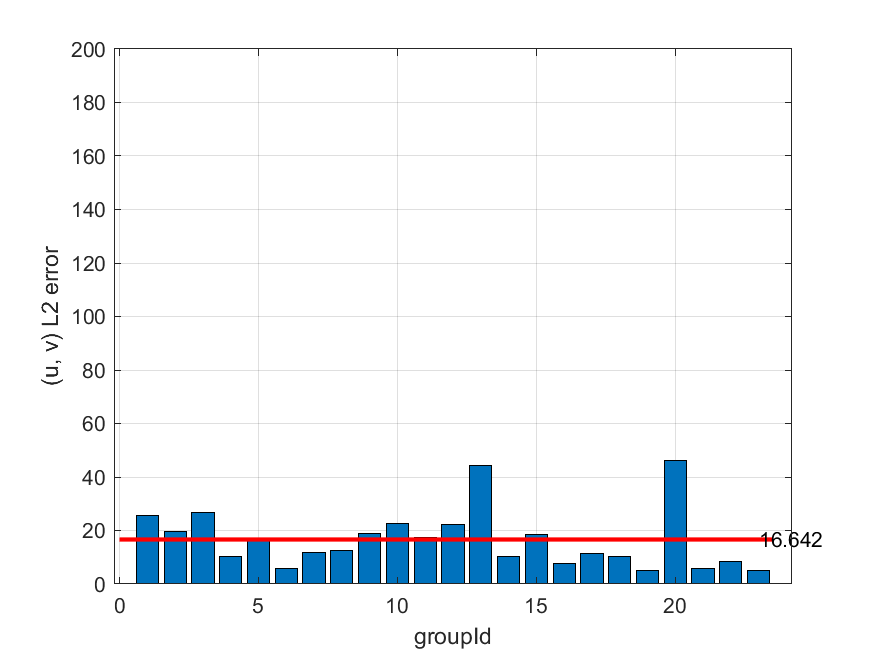
TIRadar_to_camera_extrinsic
use L-M optimization algorithm
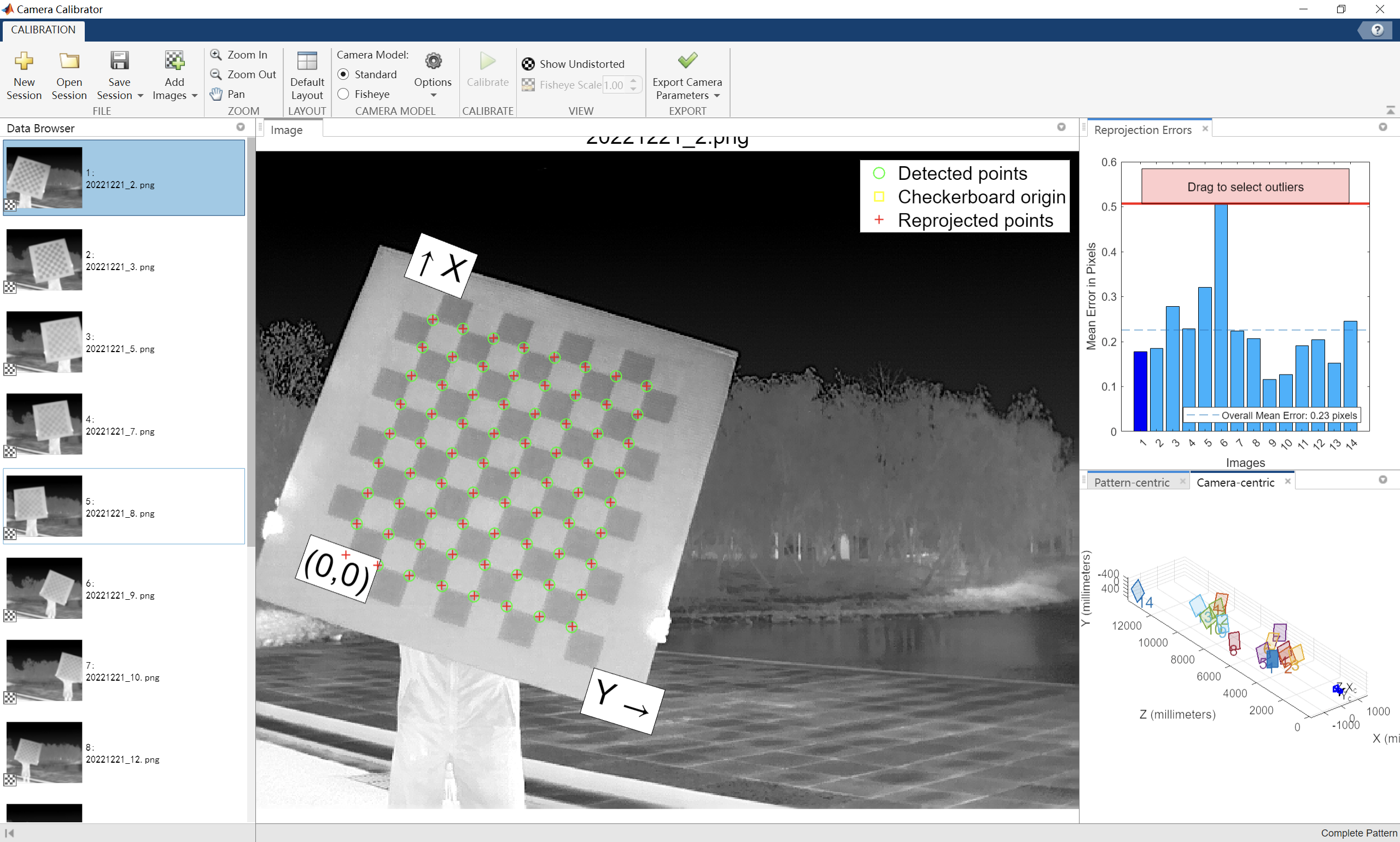
TIRadar_to_IRayCamera_extrinsic
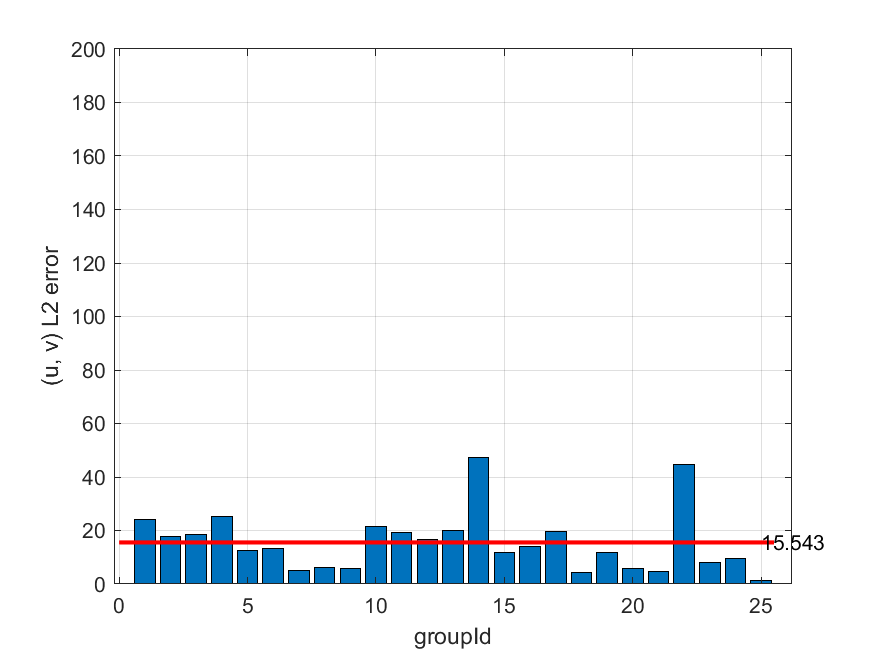
TIRadarRadar_to_LeopardCamera0_extrinsic

TIRadarRadar_to_LeopardCamera1_extrinsic
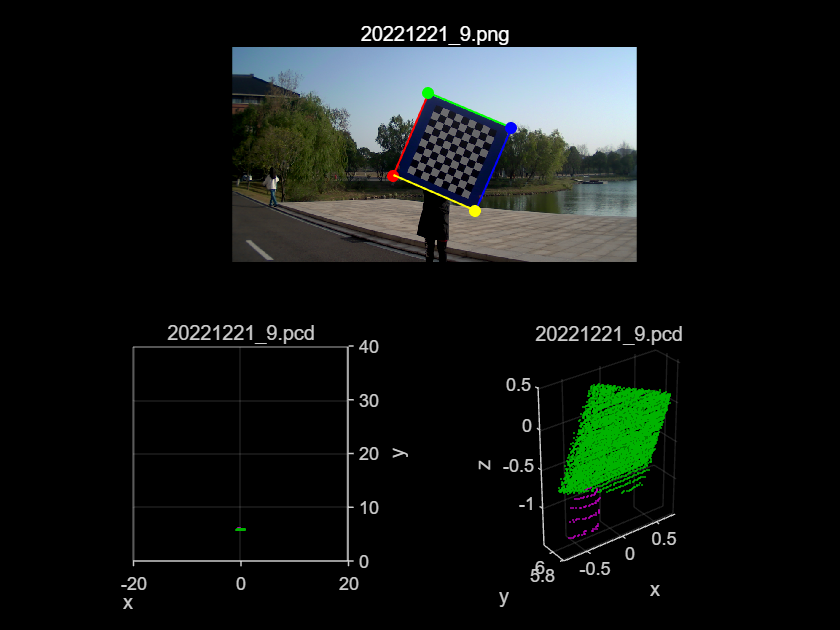
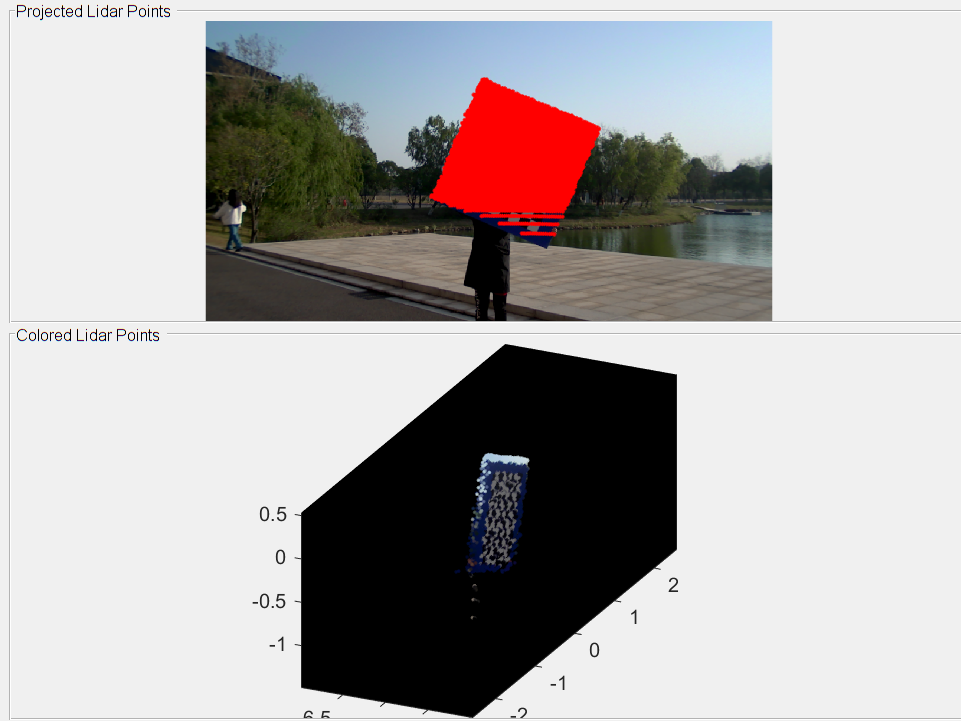
VelodyneLidar_to_camera_extrinsic
VelodyneLidar_to_LeopardCamera0_extrinsic
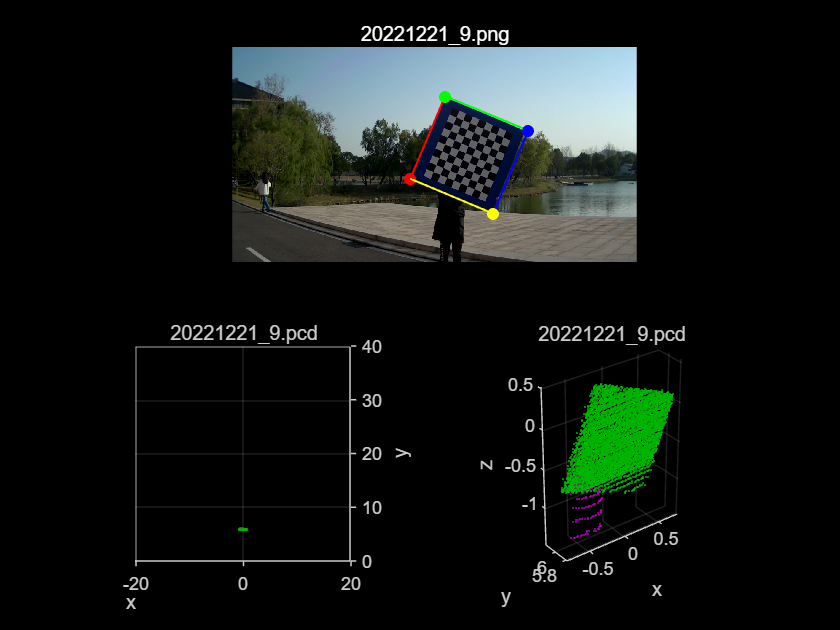
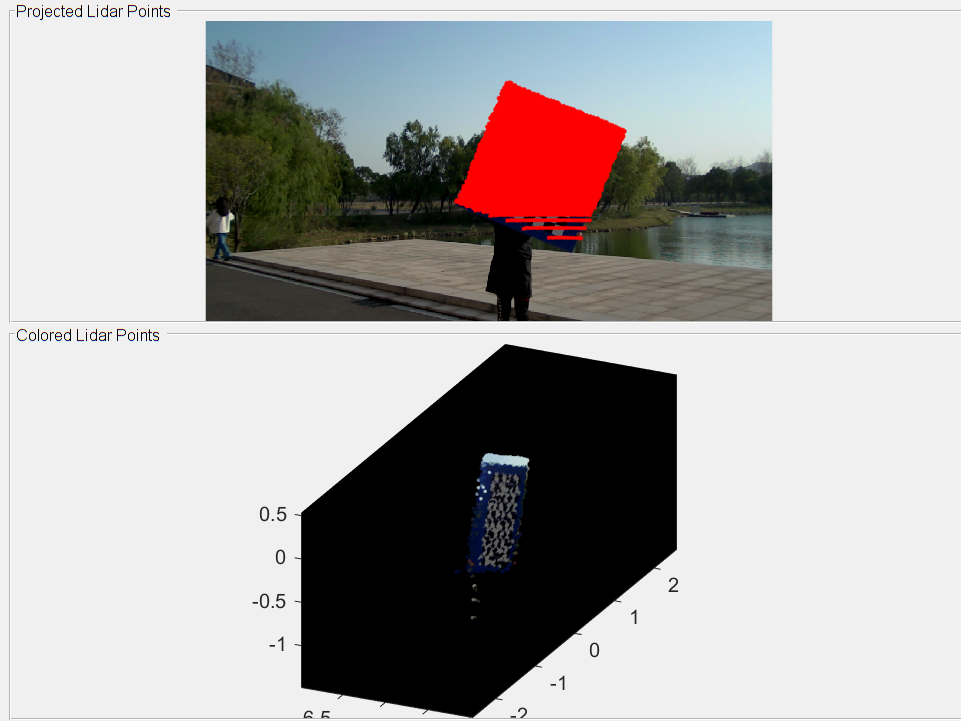
VelodyneLidar_to_LeopardCamera1_extrinsic
MEMS_to_Vehicle_extrinsic
使用SensorsCalibration/imu_heading at master · PJLab-ADG/SensorsCalibration (github.com)进行标定
MEMS_to_VelodyneLiadr_extrinsic
使用SensorsCalibration/lidar2imu at master · PJLab-ADG/SensorsCalibration (github.com)进行标定
EXP2:yantai_20221223_20221226
LeopardCamera1_to_LeopardCamera0_extrinsic
OCULiiRadar_to_camera_extrinsic
OCULiiRadar_to_IRayCamera_extrinsic
OCULiiRadar_to_LeopardCamera0_extrinsic
OCULiiRadar_to_LeopardCamera1_extrinsic
TIRadar_to_camera_extrinsic
TIRadar_to_IRayCamera_extrinsic
TIRadar_to_LeopardCamera0_extrinsic
TIRadar_to_LeopardCamera1_extrinsic
VelodyneLidar_to_camera_extrinsic
VelodyneLidar_to_IRayCamera_extrinsic
VelodyneLidar_to_LeopardCamera0_extrinsic
VelodyneLidar_to_LeopardCamera1_extrinsic
MEMS_to_Vehicle_extrinsic
MEMS_to_VelodyneLiadr_extrinsic























