
- 2023.01.12 Support TensorRT-INT8.
- 2022.11.24 A new branch of bevdet codebase, dubbed dev2.0, is released. dev2.0 includes the following features:
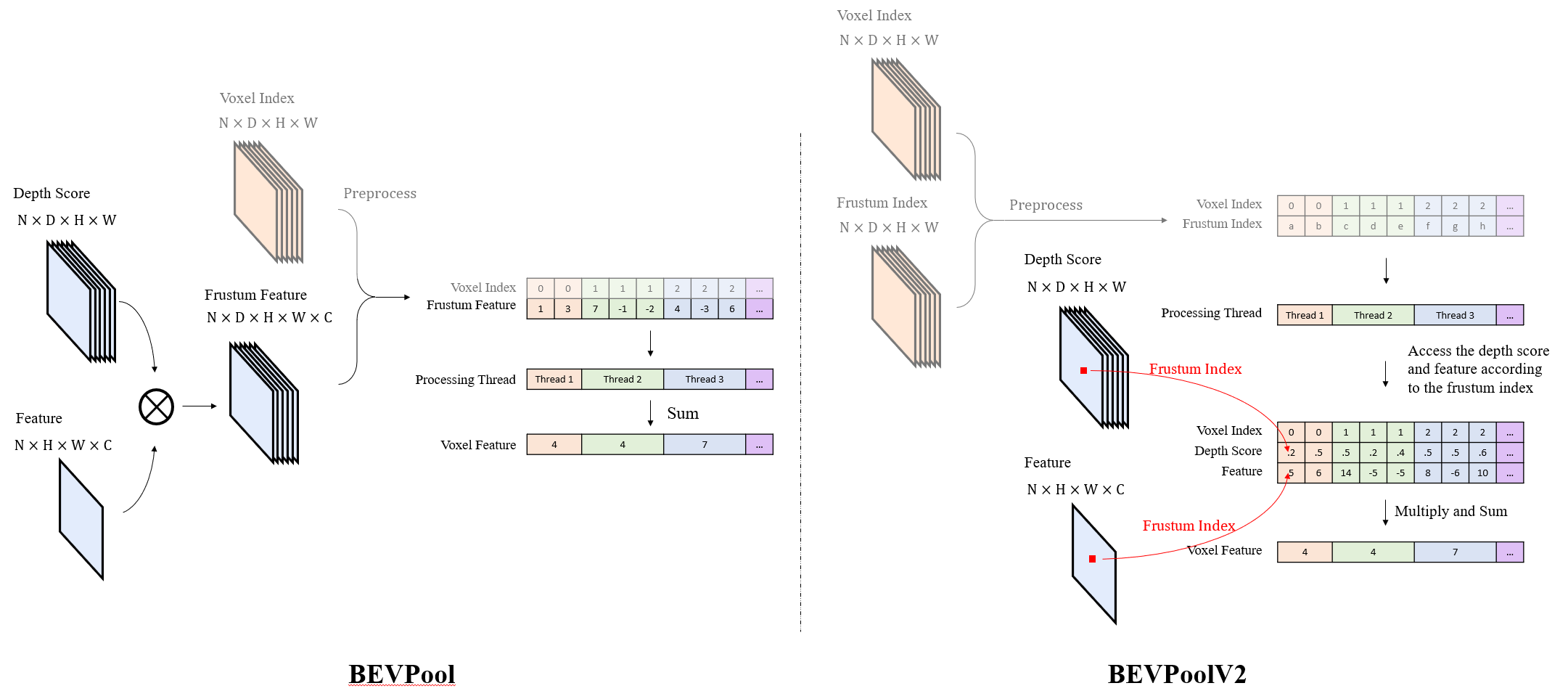
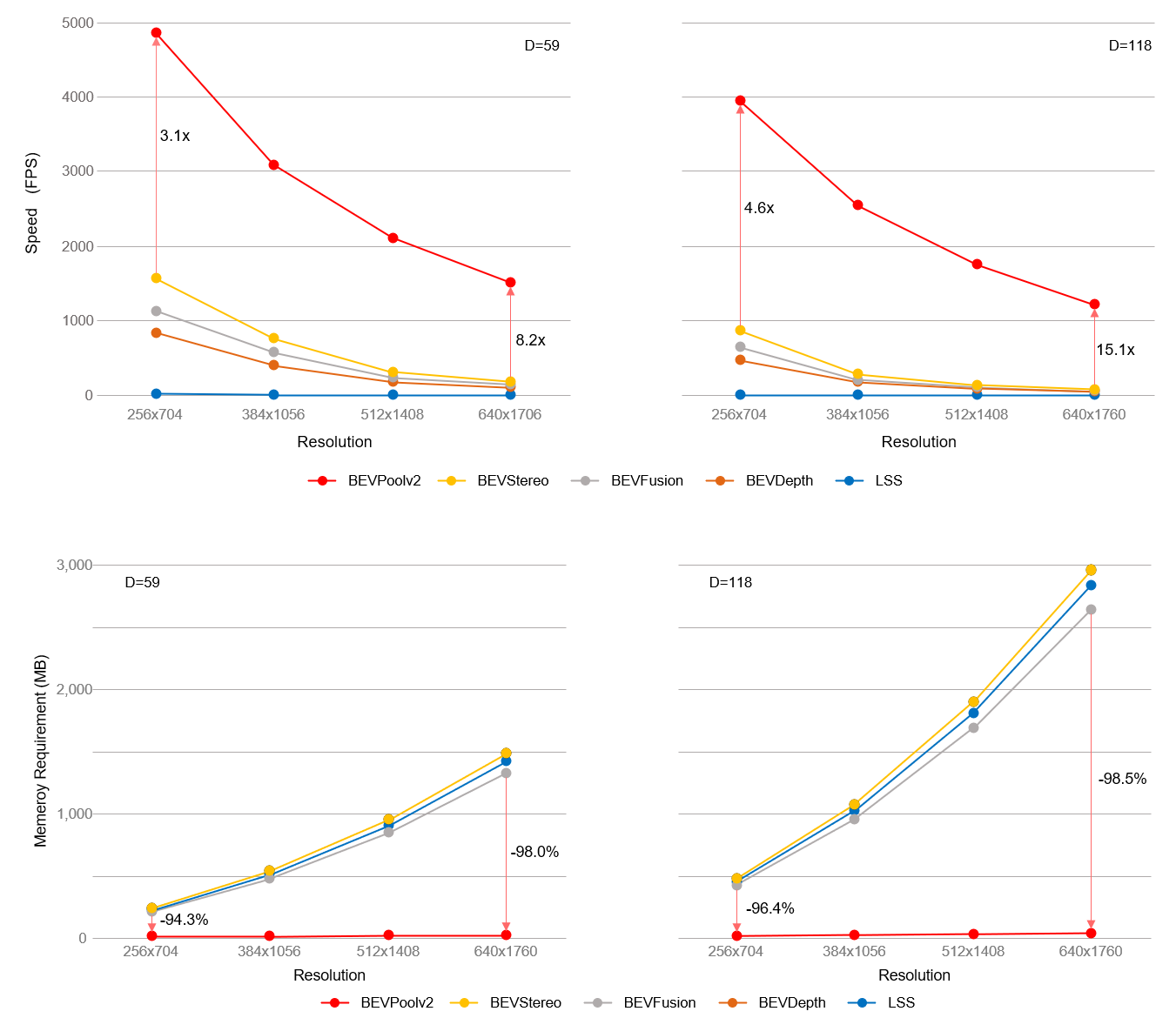
- support BEVPoolv2, whose inference speed is up to 15.1 times the previous fastest implementation of Lift-Splat-Shoot view transformer. It is also far less memory consumption.
- use the origin of ego coordinate system as the center of the receptive field instead of the Lidar's.
- support conversion of BEVDet from pytorch to TensorRT.
- use the long term temporal fusion as SOLOFusion.
- train models without CBGS by default.
- use key frame for temporal fusion.
- Technique Report BEVPoolv2 in English and Blog in Chinese.


| Config | mAP | NDS | Latency(ms) | FPS | Model | Log |
|---|---|---|---|---|---|---|
| BEVDet-R50 | 27.8 | 32.2 | 37.0/15.9/52.9 | 18.9 | ||
| BEVDet-R50-CBGS | 30.7 | 38.2 | 37.0/15.0/52.0 | 19.2 | ||
| BEVDet-R50-4D-CBGS | 34.9/35.4# | 48.4/48.6# | 35.8/15.2/51.0 | 19.6 | ||
| BEVDet-R50-4D-Depth-CBGS | 40.2/40.6# | 52.3/52.6# | 46.0/14.2/60.2 | 16.6 |
# align previous frame bev feature during the view transformation.
The latency includes Network/Post-Processing/Total.
| Backend | 256x704 | 384x1056 | 512x1408 | 640x1760 |
|---|---|---|---|---|
| PyTorch | 37.9 | 64.7 | 105.7 | 154.2 |
| TensorRT | 18.4 | 25.9 | 40.0 | 58.3 |
| TensorRT-FP16 | 7.2 | 10.6 | 15.3 | 21.2 |
| TensorRT-INT8 | 4.4 | 5.8 | 8.2 | 11.0 |
- Evaluate with BEVDet-R50 on a RTX 3090 GPU. We omit the postprocessing, which runs about 14.3 ms with the PyTorch backend.
- Please refer to getting_started.md for installing BEVDet as mmdetection3d. Docker is recommended for environment preparation.
- Prepare nuScenes dataset as introduced in nuscenes_det.md and create the pkl for BEVDet by running:
python tools/create_data_bevdet.py# with pre-computation acceleration
python tools/analysis_tools/benchmark.py $config $checkpoint --fuse-conv-bn
# 4D with pre-computation acceleration
python tools/analysis_tools/benchmark_sequential.py $config $checkpoint --fuse-conv-bn
# view transformer only
python tools/analysis_tools/benchmark_view_transformer.py $config $checkpointpython tools/analysis_tools/get_flops.py configs/bevdet/bevdet-r50.py --shape 256 704- Private implementation. (Visualization remotely/locally)
python tools/test.py $config $checkpoint --format-only --eval-options jsonfile_prefix=$savepath
python tools/analysis_tools/vis.py $savepath/pts_bbox/results_nusc.json1. install mmdeploy from https://github.com/HuangJunJie2017/mmdeploy
2. convert to TensorRT
python tools/convert_bevdet_to_TRT.py $config $checkpoint $work_dir --fuse-conv-bn --fp16 --int8
3. test inference speed
python tools/analysis_tools/benchmark_trt.py $config $engineThis project is not possible without multiple great open-sourced code bases. We list some notable examples below.
Beside, there are some other attractive works extend the boundary of BEVDet.
If this work is helpful for your research, please consider citing the following BibTeX entry.
@article{huang2022bevpoolv2,
title={BEVPoolv2: A Cutting-edge Implementation of BEVDet Toward Deployment},
author={Huang, Junjie and Huang, Guan},
journal={arXiv preprint arXiv:2211.17111},
year={2022}
}
@article{huang2022bevdet4d,
title={BEVDet4D: Exploit Temporal Cues in Multi-camera 3D Object Detection},
author={Huang, Junjie and Huang, Guan},
journal={arXiv preprint arXiv:2203.17054},
year={2022}
}
@article{huang2021bevdet,
title={BEVDet: High-performance Multi-camera 3D Object Detection in Bird-Eye-View},
author={Huang, Junjie and Huang, Guan and Zhu, Zheng and Yun, Ye and Du, Dalong},
journal={arXiv preprint arXiv:2112.11790},
year={2021}
}