$ sudo dpkg -i webots_2021a_amd64.deb
$ sudo echo "export WEBOTS_HOME=/usr/local/webots" >> ~/.bashrc
$ source ~/.bashrc
$ sudo apt-get isntall ros-melodic-webots-ros
$ sudo apt-get isntall ros-melodic-joy
$ cd ~/catkin_ws/src
$ git clone https://github.com/TaoYibo1866/vehicle_simulator.git
$ cd ~/catkin_ws
$ catkin_make
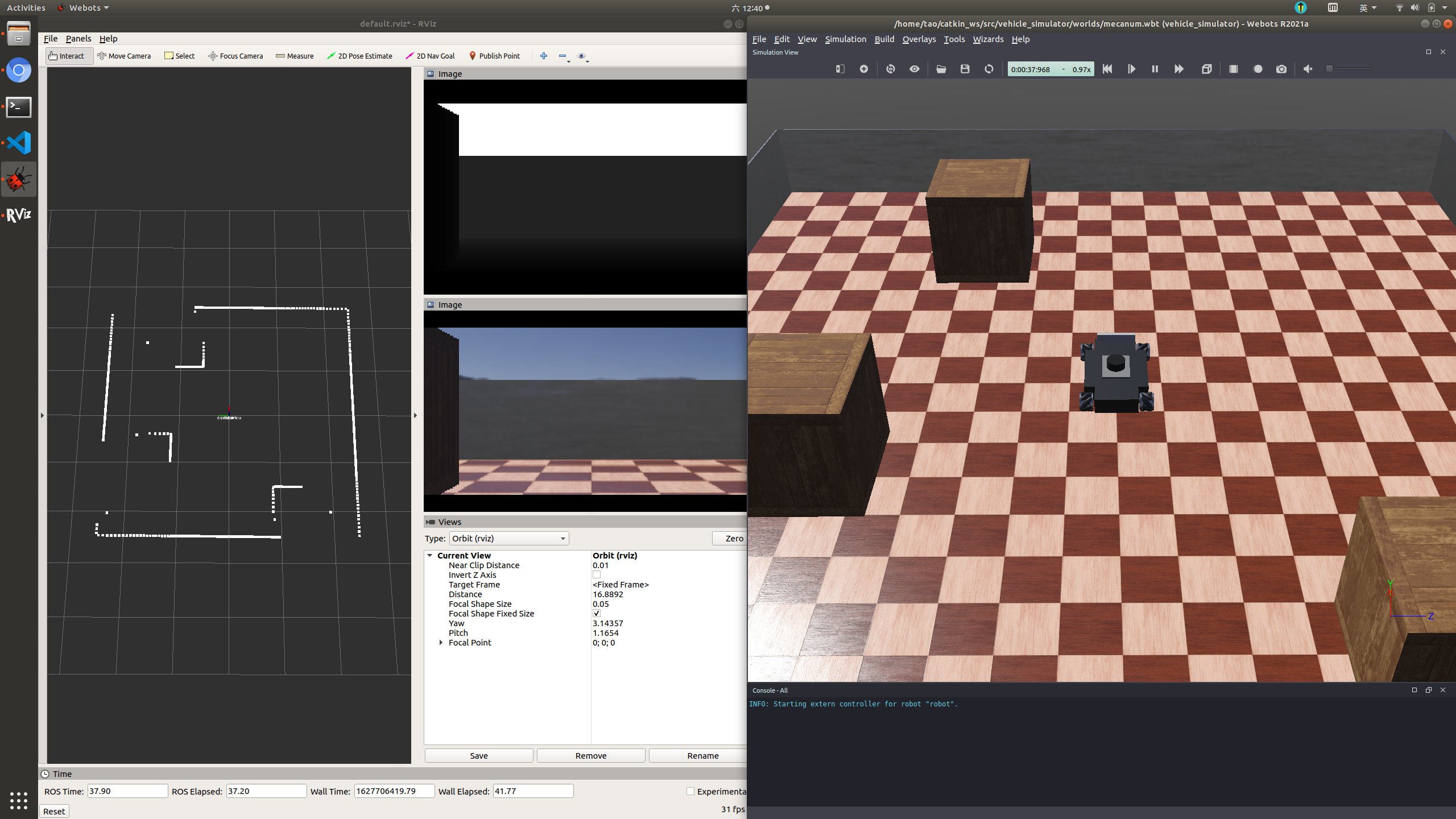
- Mecanum Scene (joystick control only tested on Logitech F710)
$ roslaunch vehicle_simulator webots_mecanum.launch
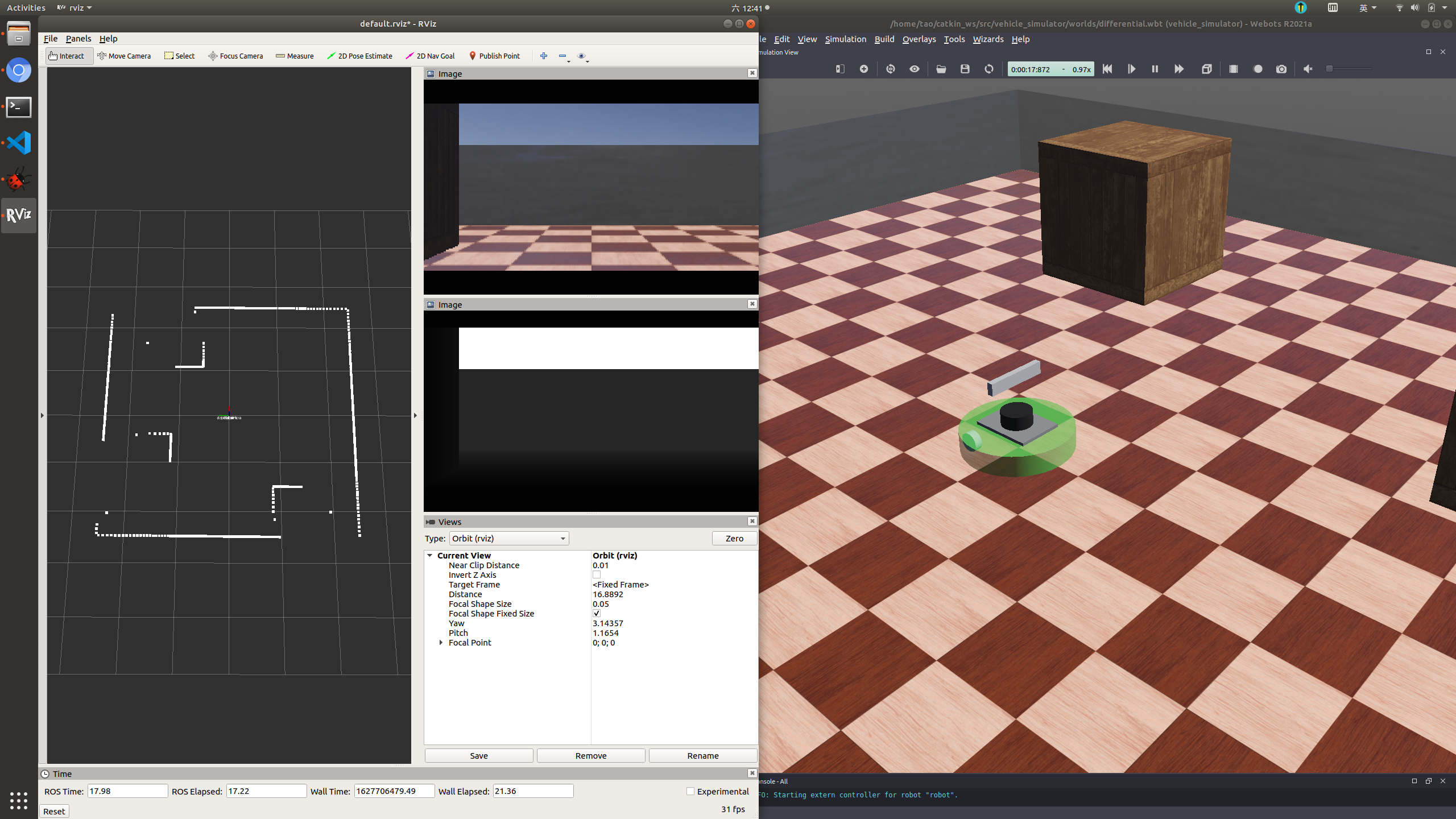
- Differential Scene (joystick control only tested on Logitech F710)
$ roslaunch vehicle_simulator webots_differential.launch