L-Tracing
This is the official PyTorch implementation of our proposed framework for surface reconstruction and reflectance decomposition.
The framework is designed based on L-Tracing: Fast Light Visibility Estimation on Neural Surfaces by Sphere Tracing [ECCV'22]

Features
-
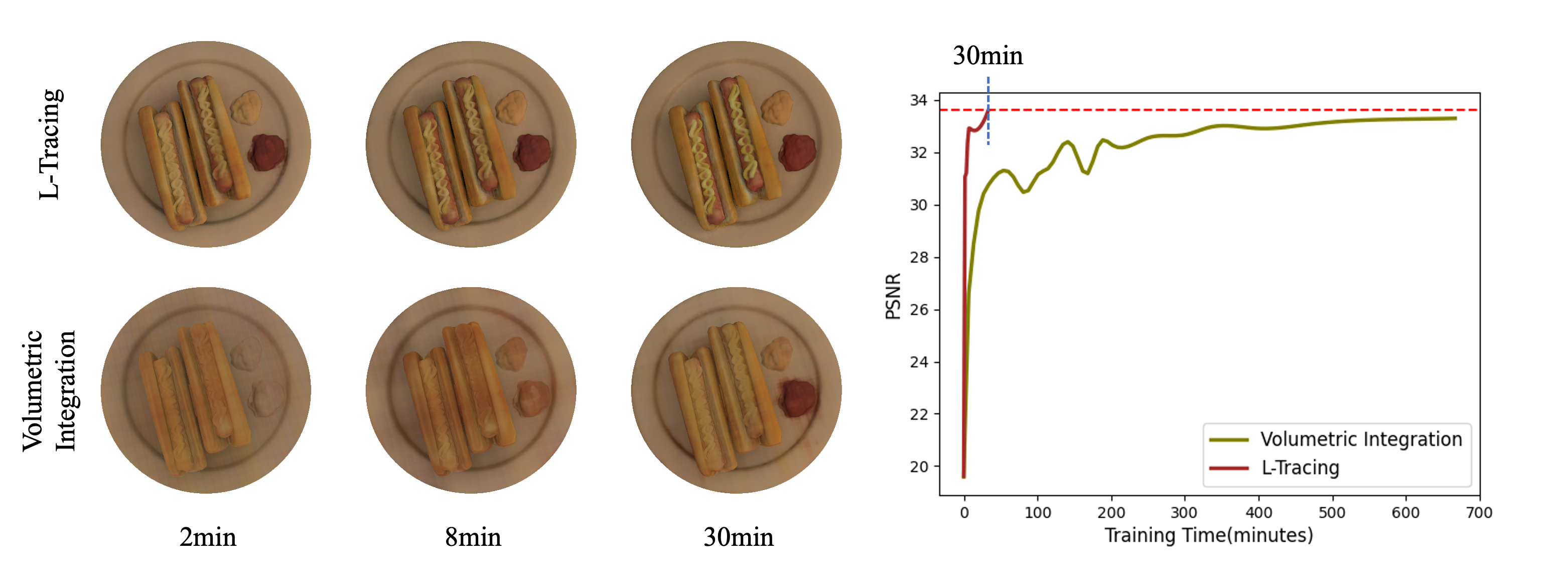
Our L-Tracing based reflectance factorization framework adapted from NeRFactor produces photo-realistic novel view images with nearly 10x speedup, compared with the same framework applying volumetric integration for light visibility estimation.
-
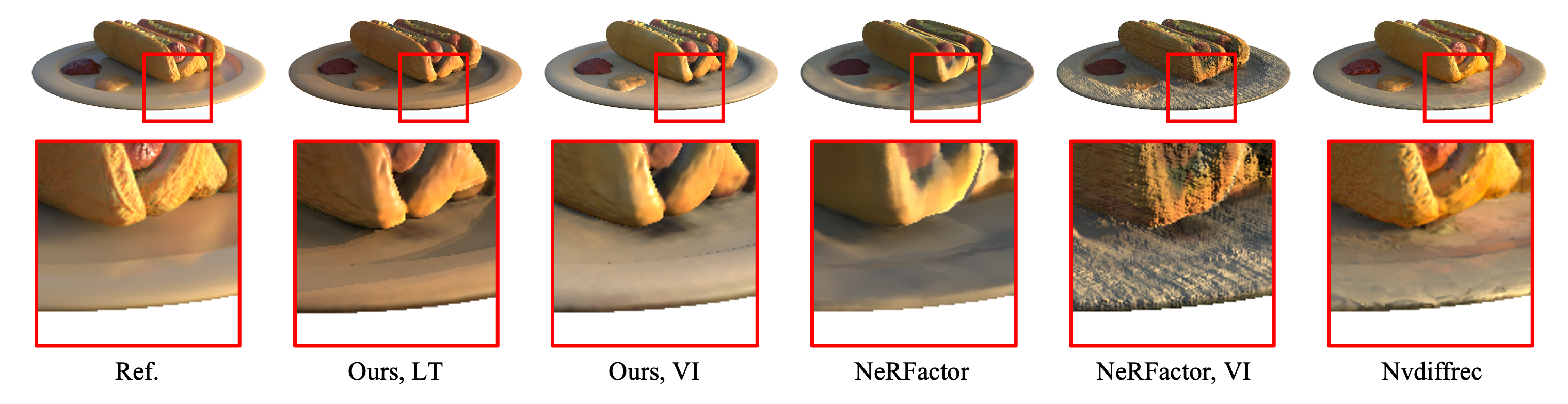
L-Tracing respects the solid object surface and the binary geometry occlusions, as a result, our framework produces sharper shadows and specular.
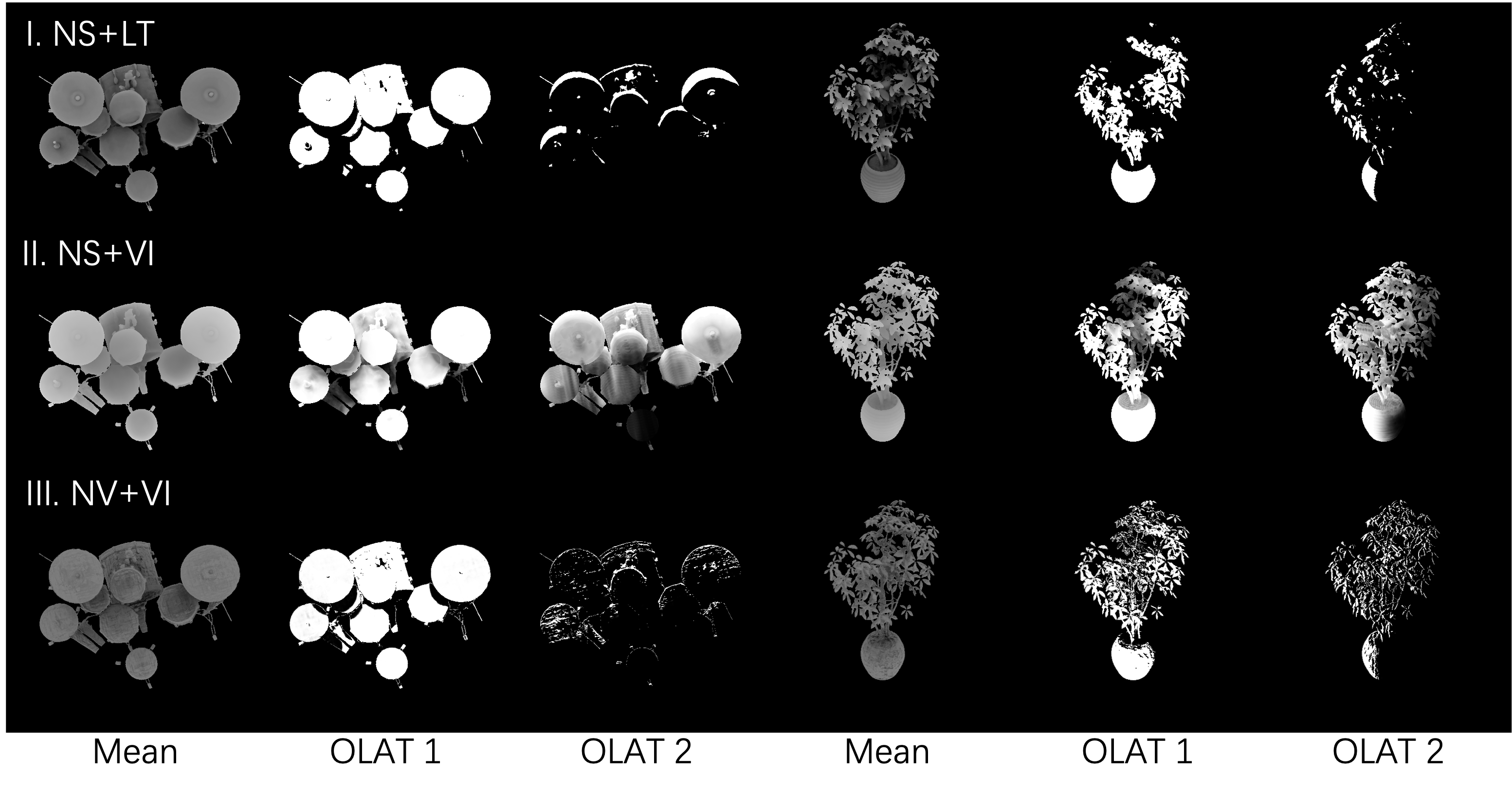
I. NS+LT: L-Tracing on Neural Surface, our proposed framework based on L-Tracing.
II. NS+VI: Volume Integration on Neural Surface, based on SDF shape representation, convert signed distance to density for volume integration.
III. NV+VI: Volume Integration on Neural Volume, based on neural volume representation, directly apply volumetric integration on neural volumes.
-
We show the details of relighting with a novel environment illumination.



Installation
-
python>=3.6
-
pytorch>=1.6.0
-
pip install tqdm scikit-image opencv-python pandas tensorboard addict imageio imageio-ffmpeg pyquaternion scikit-learn pyyaml seaborn PyMCubes trimesh plyfile deepdish
Download
DTU
wget this [link] according to IDR to download the DTU dataset.
wget https://www.dropbox.com/s/ujmakiaiekdl6sh/DTU.zip NeRF Synthetic
From NeRFactor [project page], download the NeRF Synthetic dataset from google drive [link].
Download all .zip files in rendered_images/, unzip them and put them to /data/nerf_synthetic.
NeRF Real
From the [link]. Download all .zips file in real_images/, unzip them to /data/nerf_real.
HDR Light Probes
From the [link]. Download HDR light probes light-probes.zip , for novel light relighting.
Data Structure
The downloaded files are supposed to be put under the folder /data.
├── data
├── nerf_synthetic
│ ├── drums
│ ├── ficus
│ ├── ...
├── nerf_real
│ ├── pinecone
│ ├── vasedeck
├── dtu
│ ├── dtu_110
│ ├── dtu_114
│ ├── ...
├── light-probe
│ ├── test
│ │ ├── ...
Running
stage1 shape reconstruction
Run train_shape.sh for NeuS shape reconstruction.
Please refer to ./config/surfrecon.yaml for settings.
python train.py --config ./config/surfrecon.yamlStage2 Reflectance Decomposition
Run train_surf.sh for our L-Tracing based surface reflectance decomposition.
Please refer to ./config/surfactor.yaml for settings. (lego for example)
shape_ckpt_path=./logs/lego_shape/ckpts/latest.pt # the path to the trained shape ckpt
python train.py --config ./config/surfactor.yaml --training:ckpt_file $shape_ckpt_pathEvaluation and Relighting
Run test.sh to generate visualizations of the RGB image and albedo in novel views, as well as rendering results with novel light source (light probes, or your own images as environment map).
test_cfg_path=./logs/lego_surf/config.yaml
val_downscale=1
python test.py --config $test_cfg_path --data:val_downscale $val_downscaleAcknowledgements
This repository is mainly built on the basis of neurecon(@ventusff), welcome everyone to follow and star https://github.com/ventusff/neurecon.
This repository borrows a lot from the official implementation of NeRFactor: https://github.com/google/nerfactor. Thanks to the author for their inspiring work.
BibTeX
@inproceedings{chen2022tracing,
title={L-Tracing: Fast Light Visibility Estimation on Neural Surfaces by Sphere Tracing},
author={Chen, Ziyu and Ding, Chenjing and Guo, Jianfei and Wang, Dongliang and Li, Yikang and Xiao, Xuan and Wu, Wei and Song, Li},
booktitle={Proceedings of the European Conference on Computer Vision (ECCV)},
year={2022}
}