Recover the scale of monocular visual odometry
- save your image name in path_to_image_list by
find path/| sort >path_to_image_list - modify the
src/param.pybased on your dataset - run
python3 src/main.py path_to_image_list
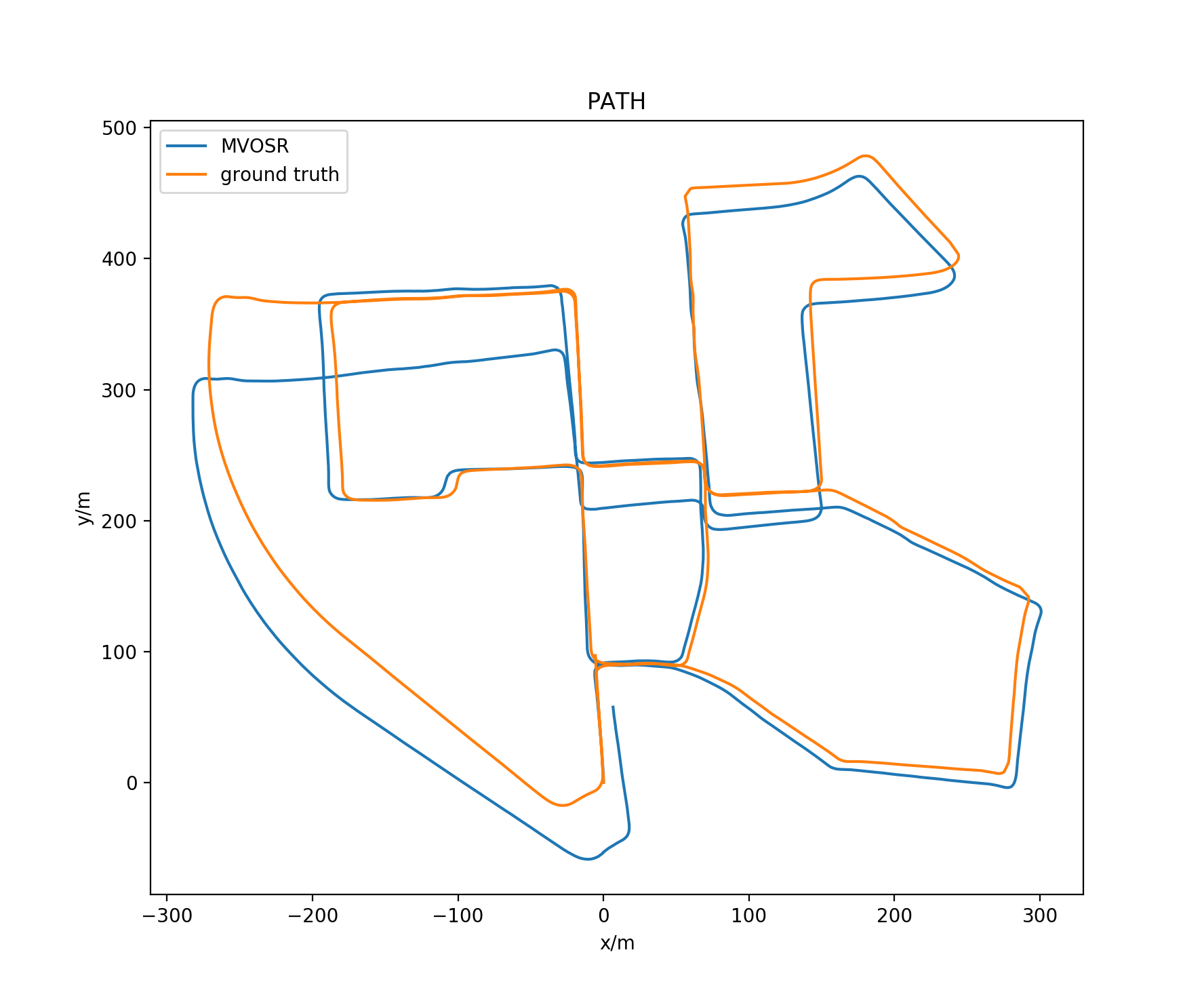
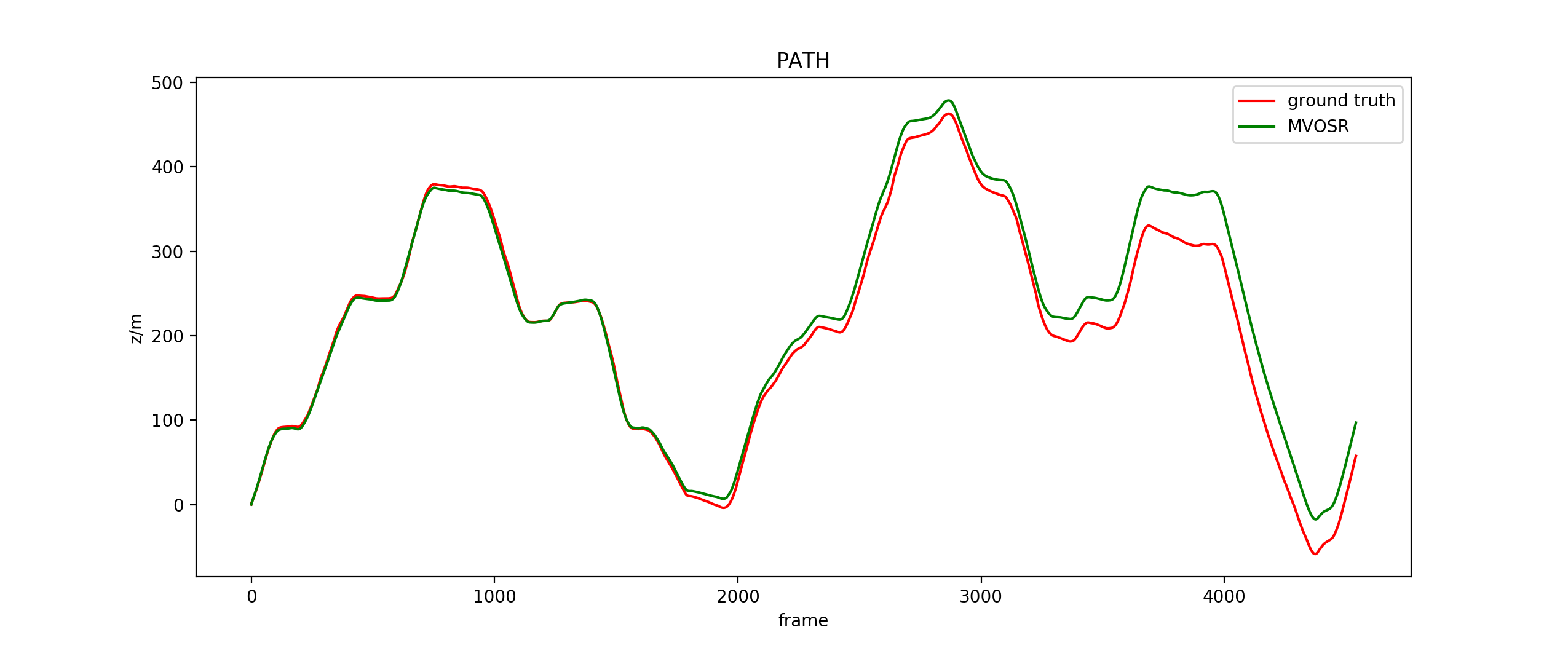
this is a scale recoery for a simple monocular VO, the accuracy is degraded. Current error of KITTI 00 by KITTI benchmark is 2.17% (ave every 800m)
-
KITTI 00
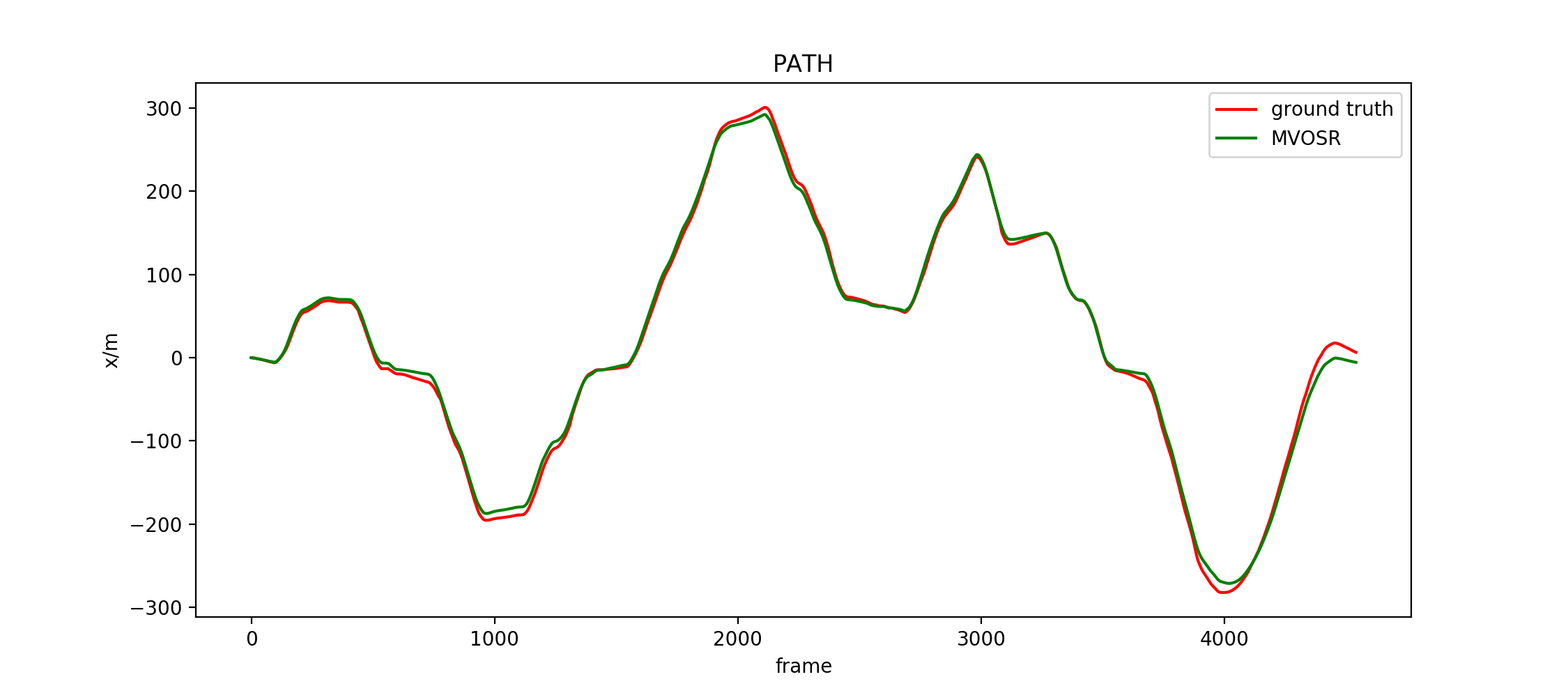
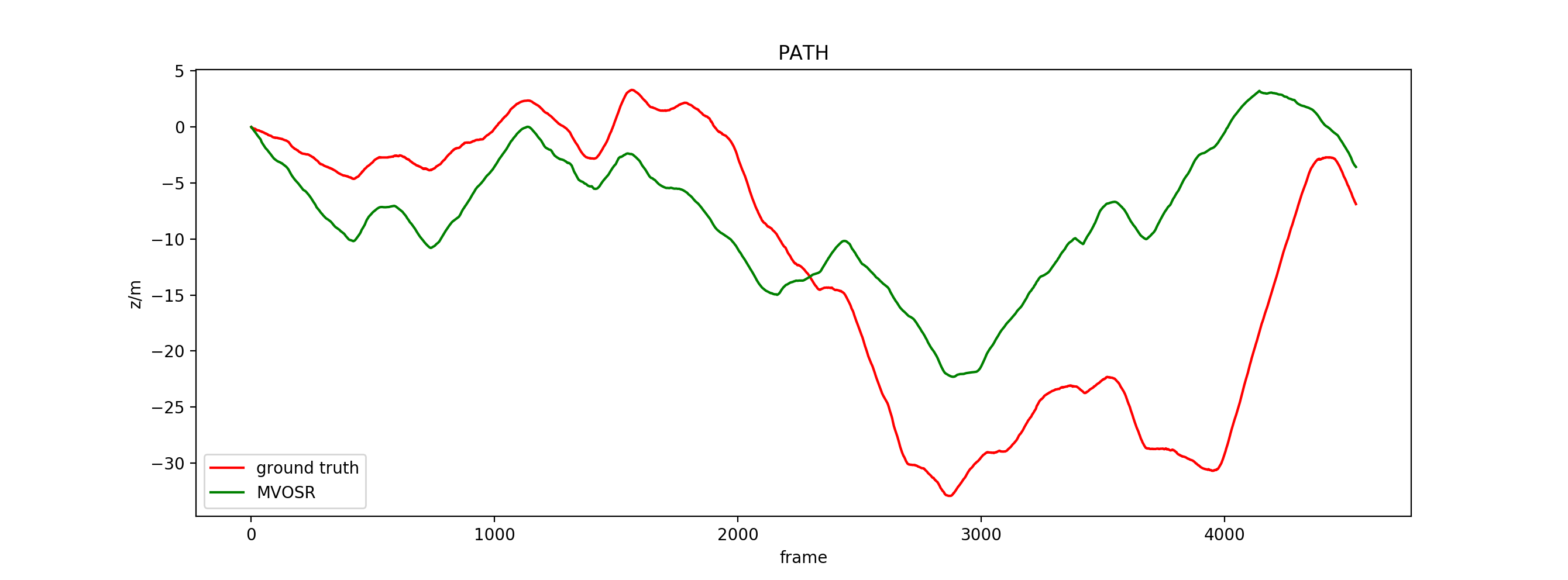
-
KITTI 02
-
Initial Triangles before rance
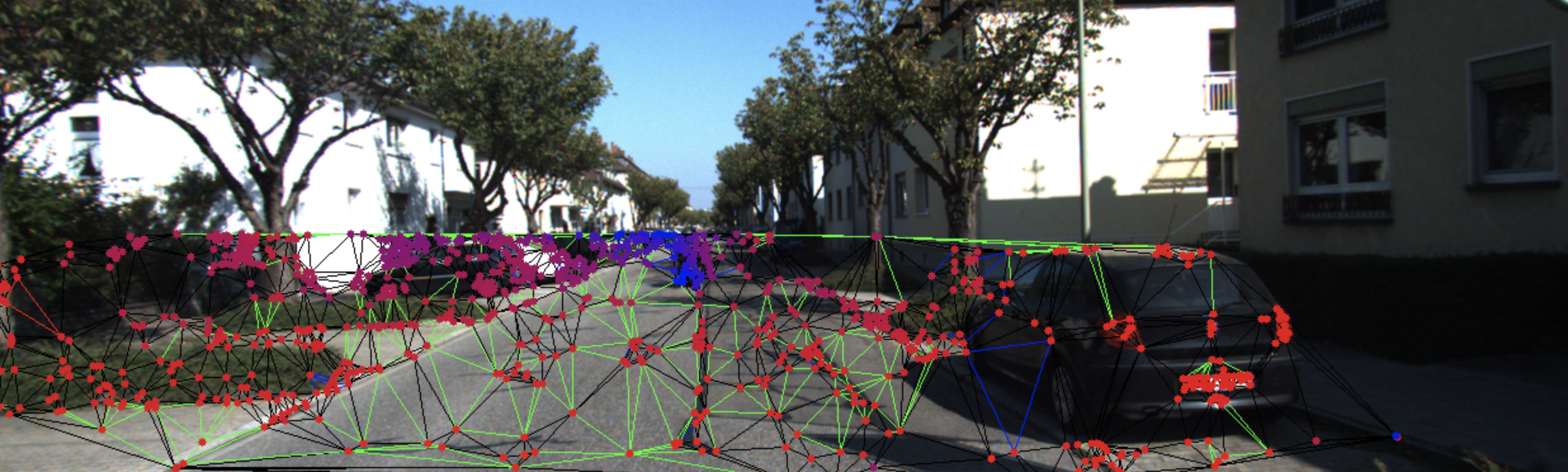
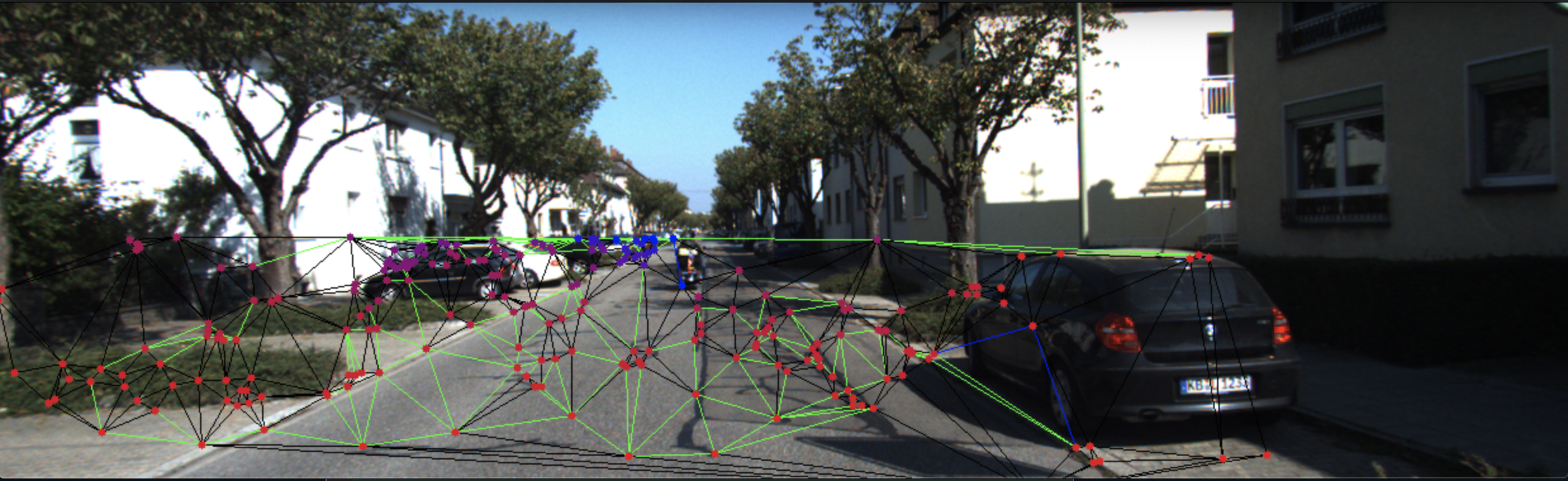
-
depth and reconstruct