Self-made Gazebo maps and models for public
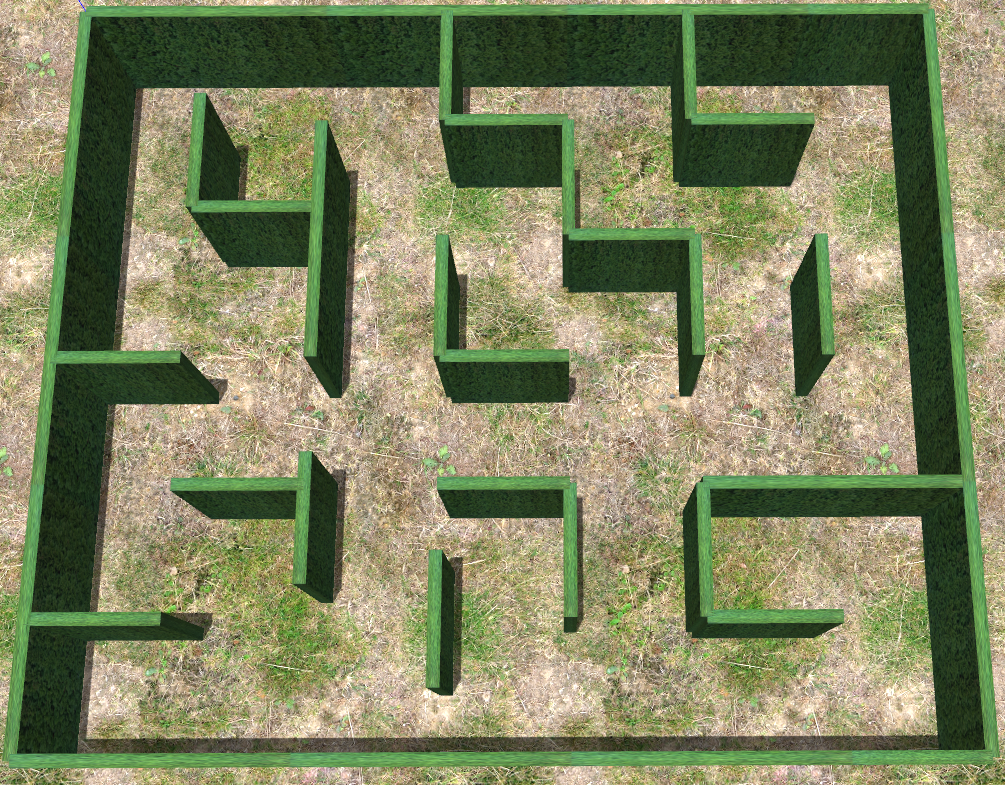
- Exploration map used in the paper:
- REAL: Rapid Exploration with Active Loop-Closing toward Large-Scale 3D Mapping using UAVs, 2021 IROS
- QR-SCAN: Traversable Region Scan for Quadruped Robot Exploration using Lightweight Precomputed Trajectory, 2021 ICCAS
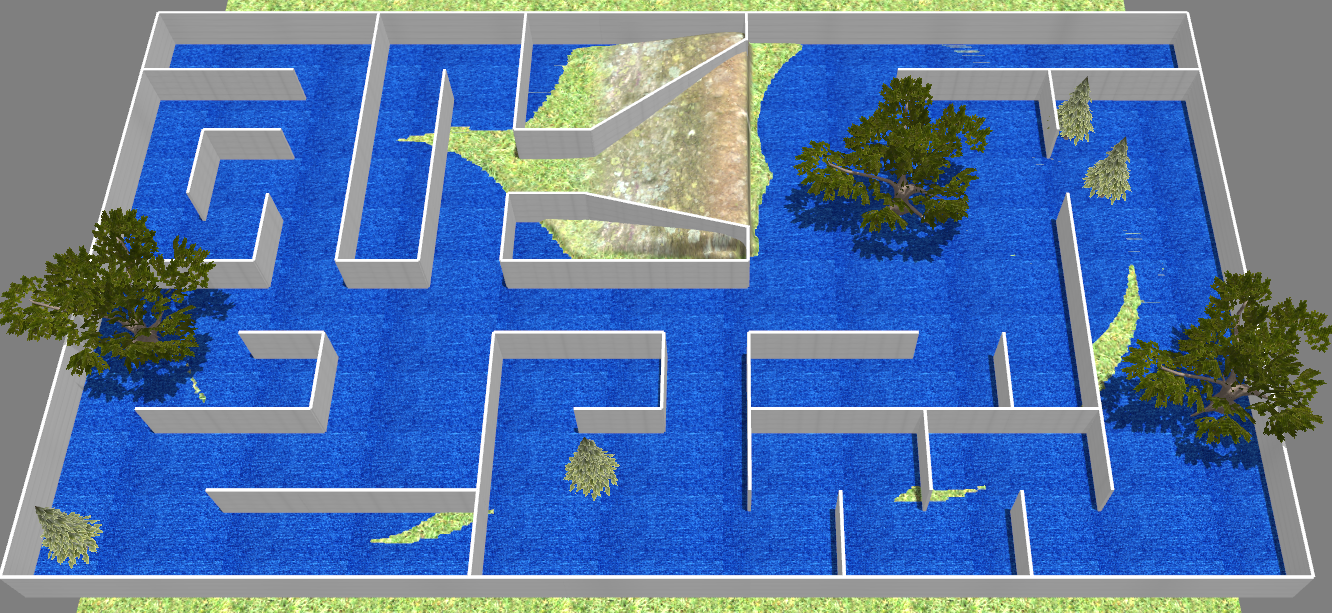
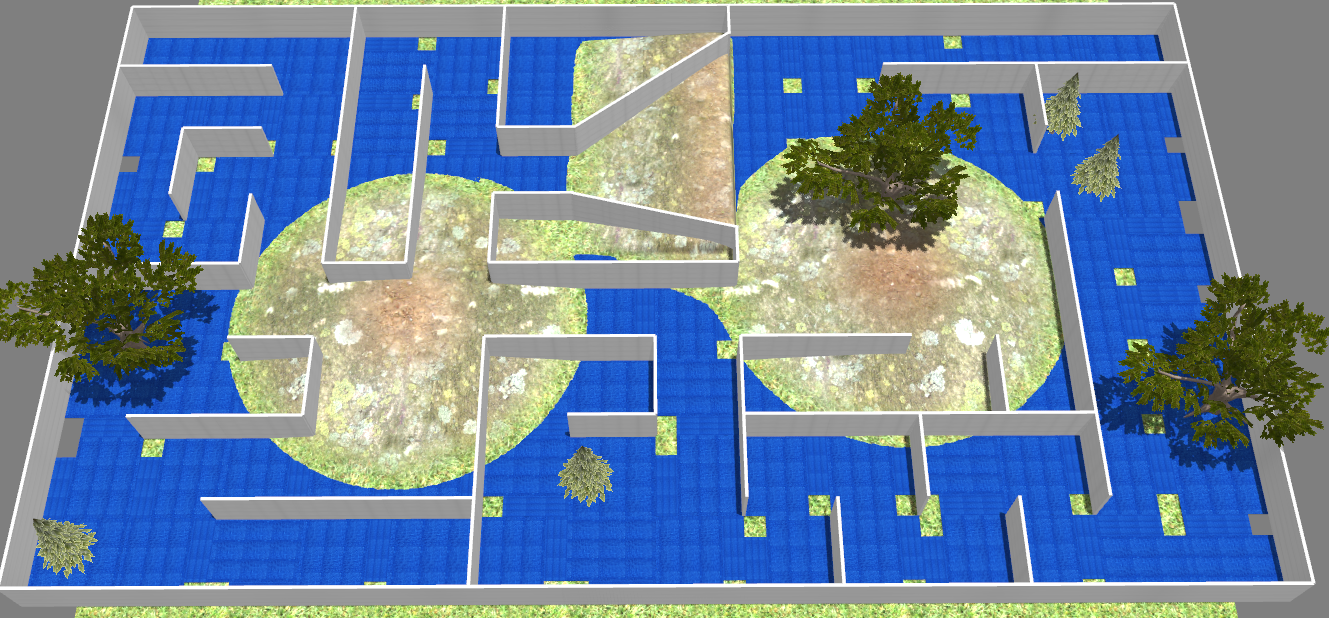
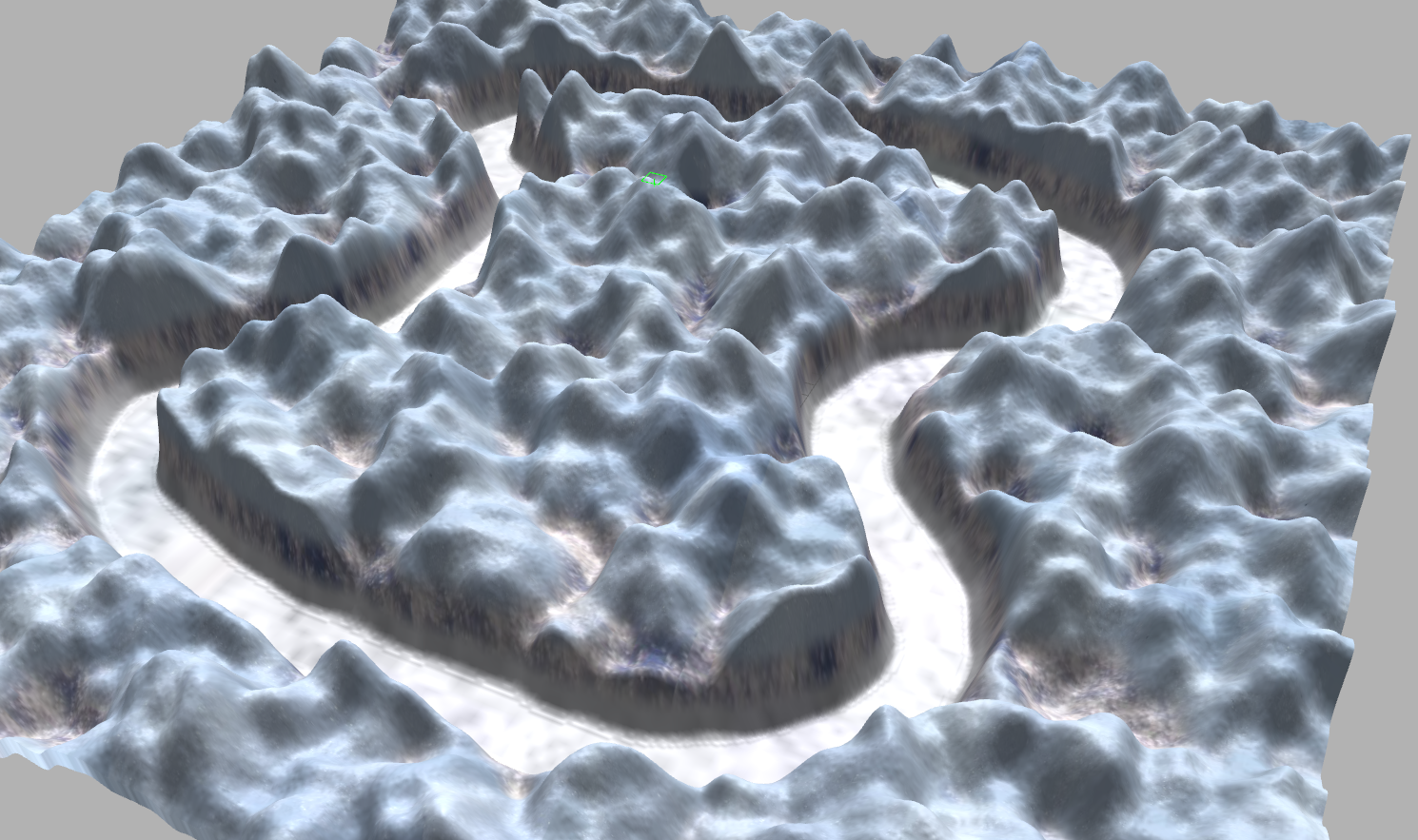
- maze with height map (hills and cliff) environment
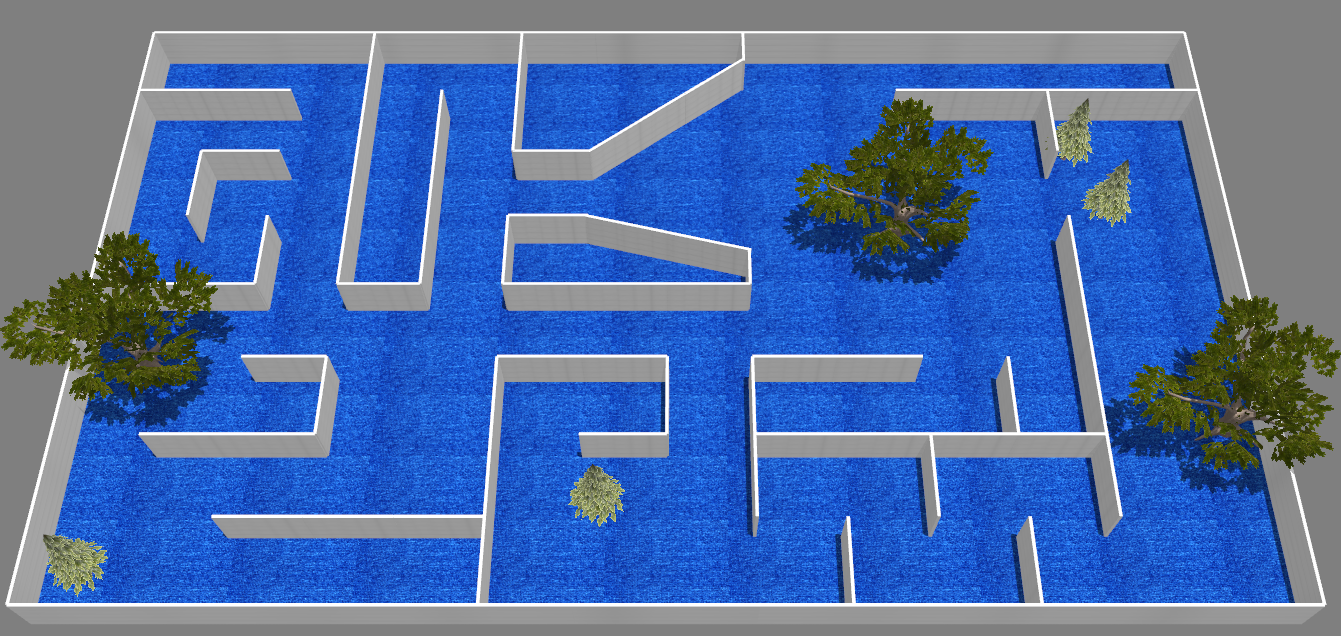
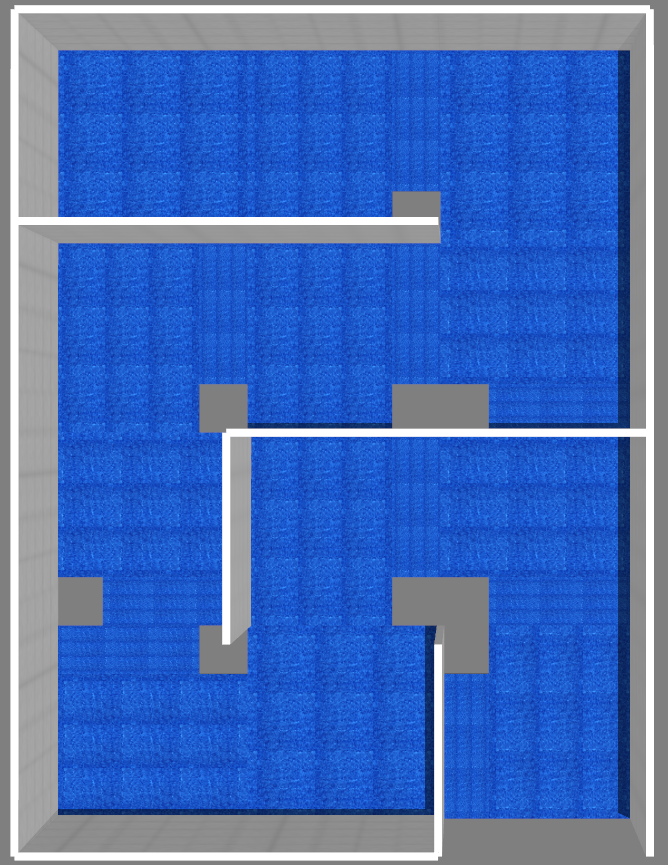
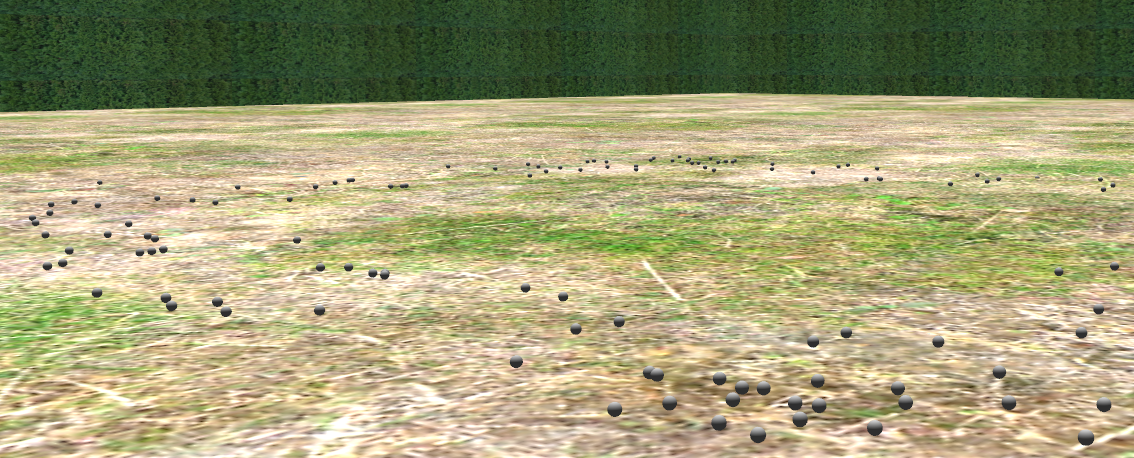
- maze with hole-ground
- Peacock exploration: a lightweight exploration for UAV using control-efficient trajectory, 2020 RiTA
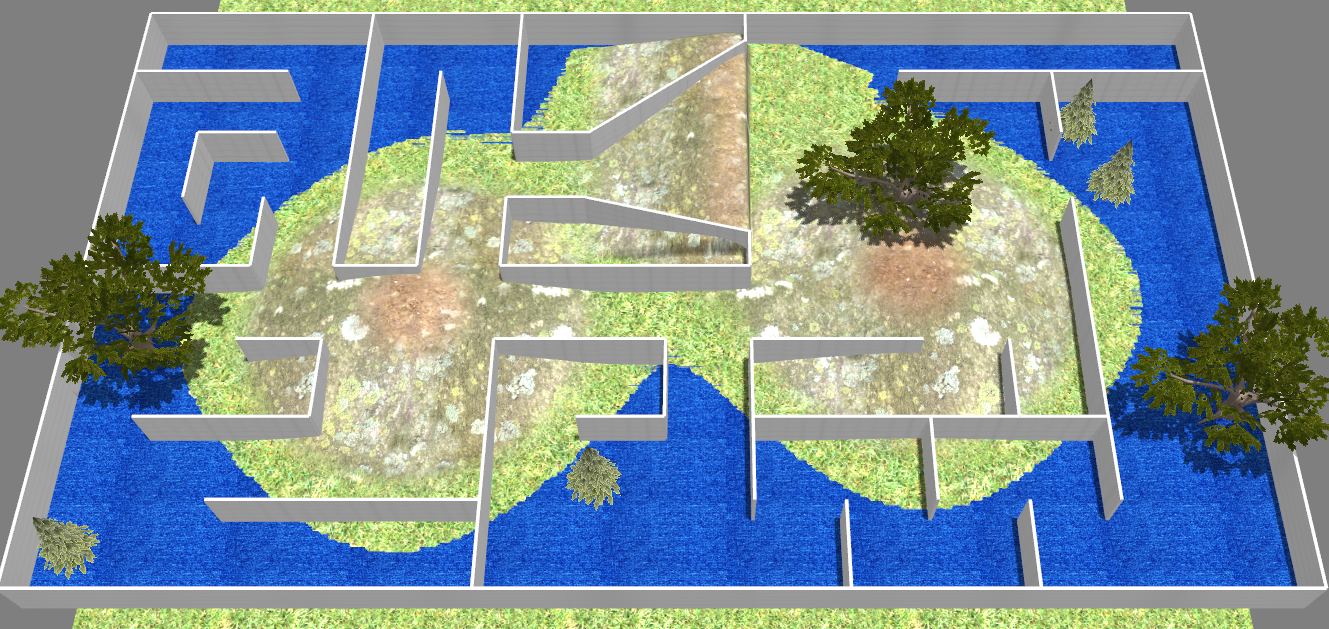
- Maze with 3D obstacles
- Map used in the paper:
- ROLAND: Robust Landing of UAV on Moving Platform using Object Detection and UWB based Extended Kalman Filter, 2021 ICCAS
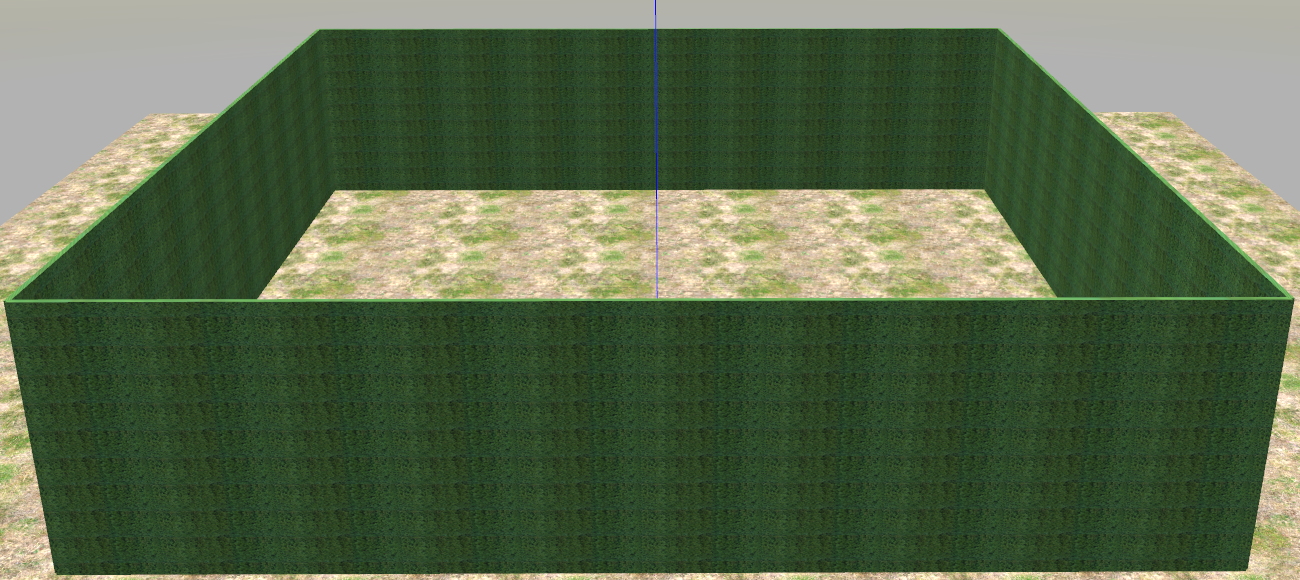
- wall bounded world (with obstacles)
- ROLAND: Robust Landing of UAV on Moving Platform using Object Detection and UWB based Extended Kalman Filter, 2021 ICCAS
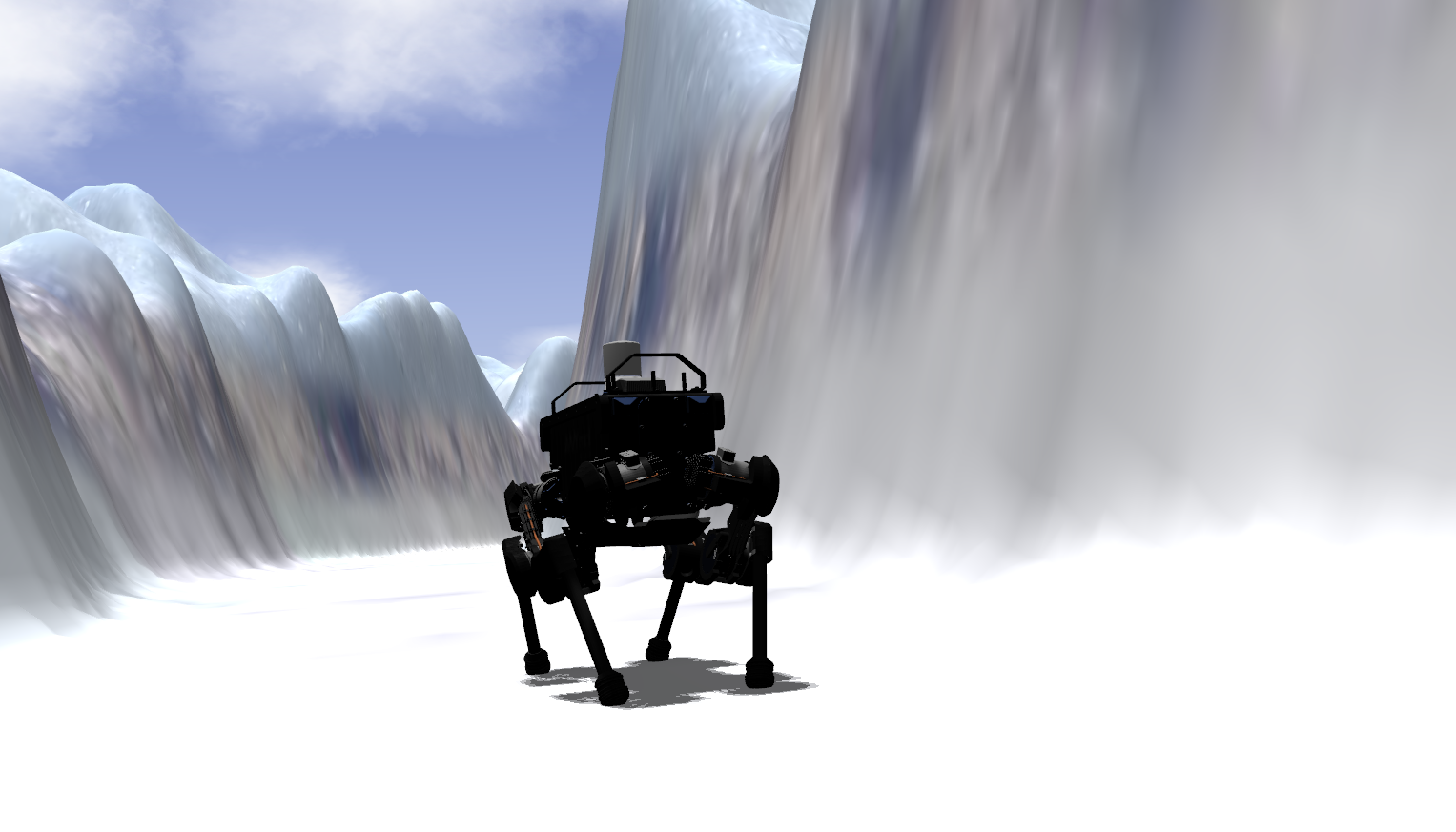
- Textureless and featureless map for visual-inertial odometry used in the paper:
- STEP: State Estimator for Legged Robots Using a Preintegrated Foot Velocity Factor, 2022 IEEE RA-L
- Iced outdoor mountain
- STEP: State Estimator for Legged Robots Using a Preintegrated Foot Velocity Factor, 2022 IEEE RA-L
- War site scenario map used in the paper:
- Quadruped robot competition map
[Click to see pictures]
-
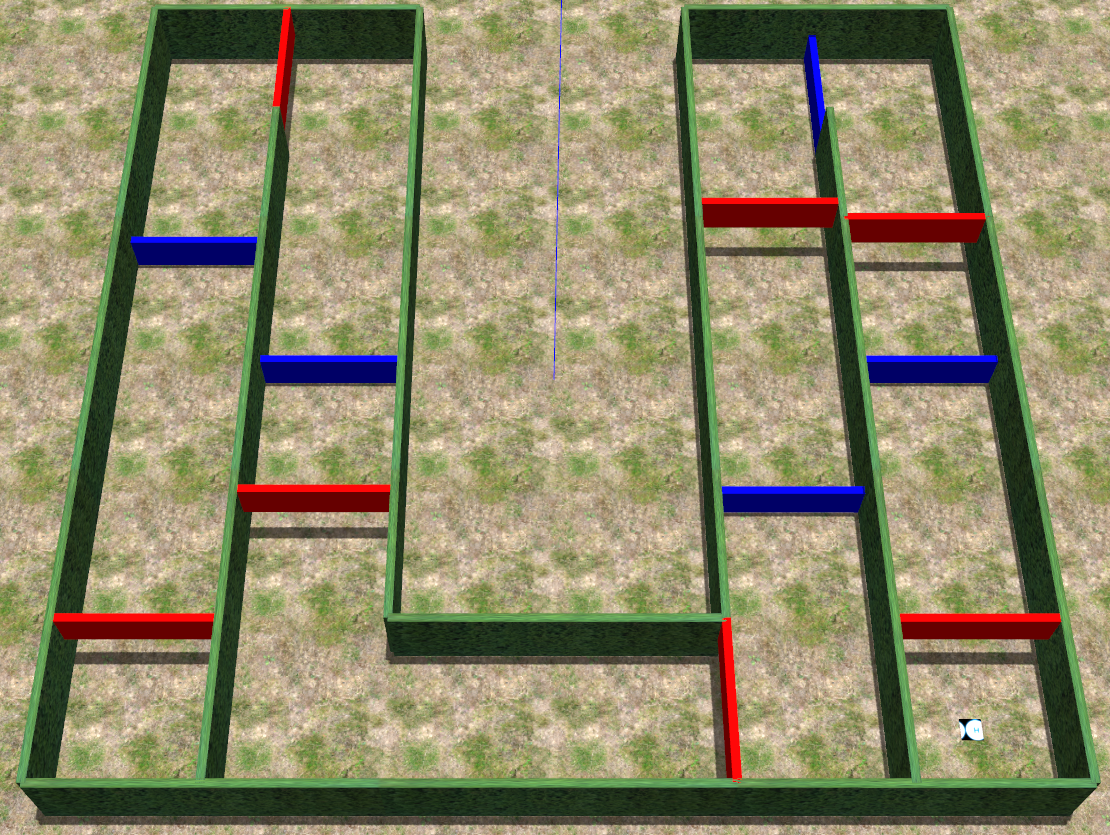
small-scale maze
-
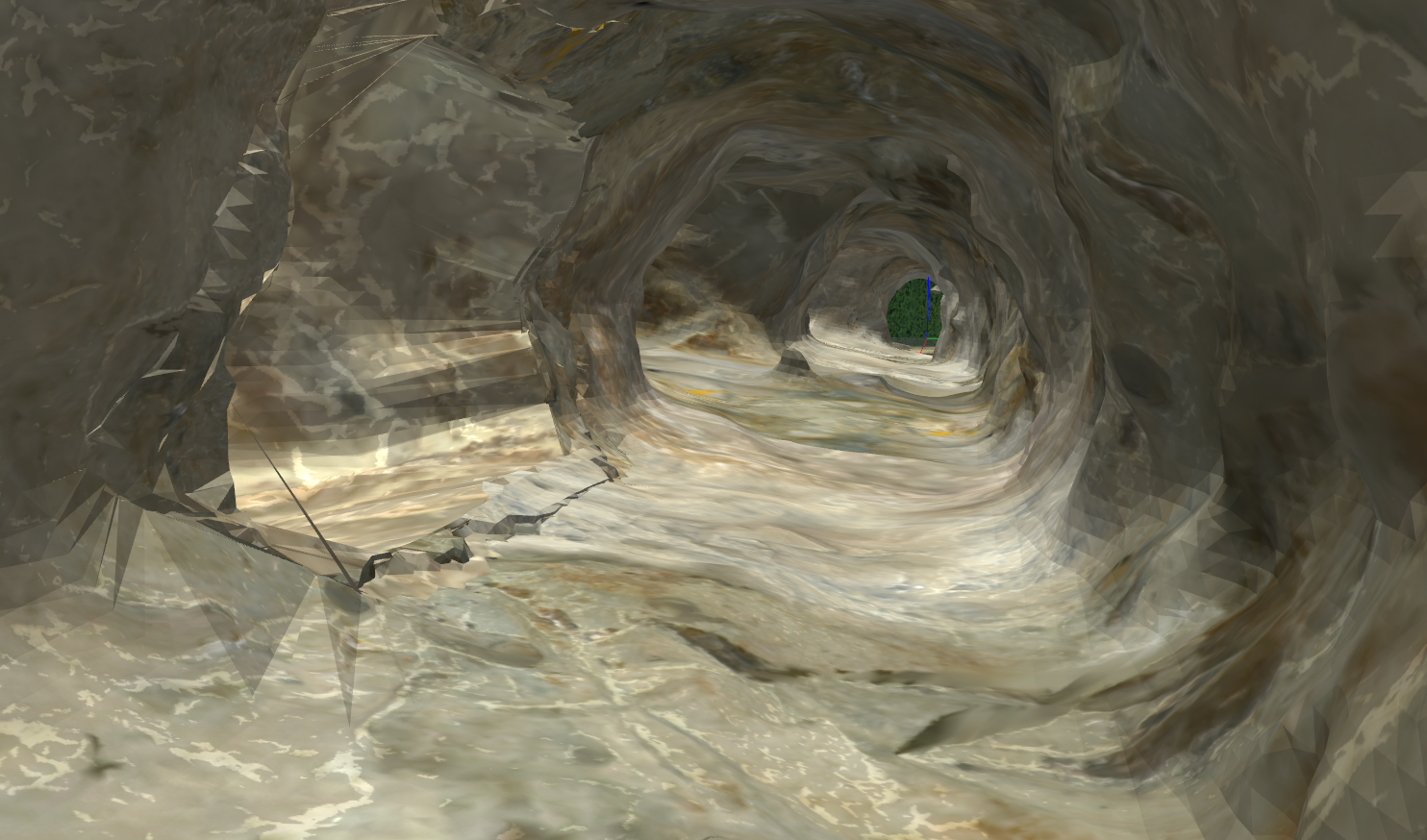
large-scale mine

-
maze with height maps
-
maze with hole-ground

-
maze with 3D obstacles
-
tall wall-bounded world
-
Iced outdoor mountain
-
Military fortress
















-
Reconstruction models used in the paper:
- CEO-MLCPP: Control-Efficient and Obstacle-aware Multi-Layer Coverage Path Planner for 3D reconstruction with UAVs, 2022 RiTA
Big-Ben,Louisiana State HouseEiffel Tower,Japanese temple
- CEO-MLCPP: Control-Efficient and Obstacle-aware Multi-Layer Coverage Path Planner for 3D reconstruction with UAVs, 2022 RiTA
-
(Pending) Reconstruction models used in the paper:
- EQA-CPP: Energy and Quality-Aware Coverage Path Planner for 3D reconstruction with UAVs, 2023 RA-L (pending)
Alexander Nevsky Cathedral,At Tin Mosque,Japanese temple2Louisiana State House,San Adrian thermal powerplant,Khram Pokrova,Orthodox churchTomb of Tu Duc,Stone churchMexico City Cathedral
- EQA-CPP: Energy and Quality-Aware Coverage Path Planner for 3D reconstruction with UAVs, 2023 RA-L (pending)
[Click to see pictures]
-
Models in
recon1.tar.xzfile (Big-Ben,Louisiana State House,Eiffel Tower,Japanese temple)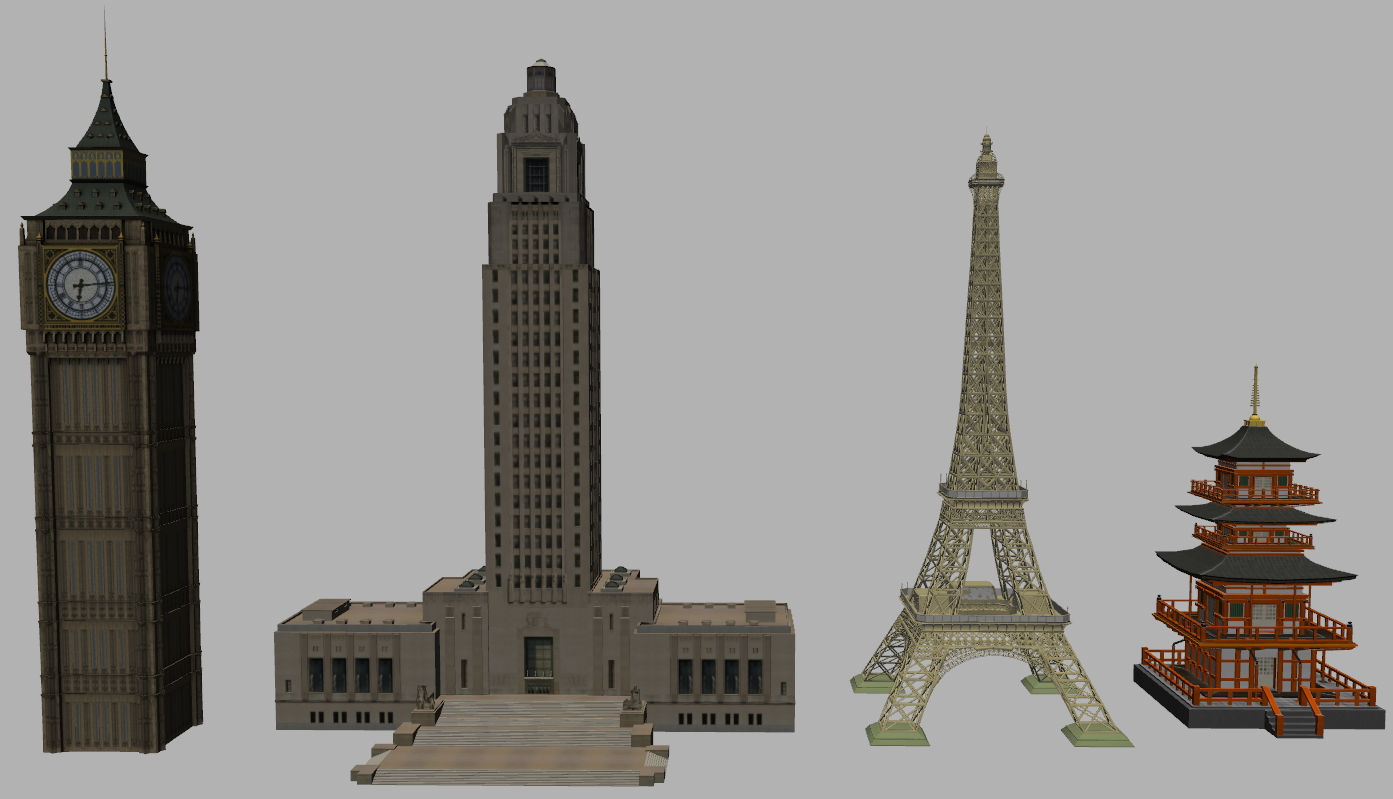
-
Models in
recon2.tar.xzfile (Alexander Nevsky Cathedral,At Tin Mosque,Japanese temple2)
-
Models in
recon3.tar.xzfile (San Adrian thermal powerplant,Khram Pokrova,Orthodox church)
-
Models in
recon4.tar.xzfile (Tomb of Tu Duc,Stone church)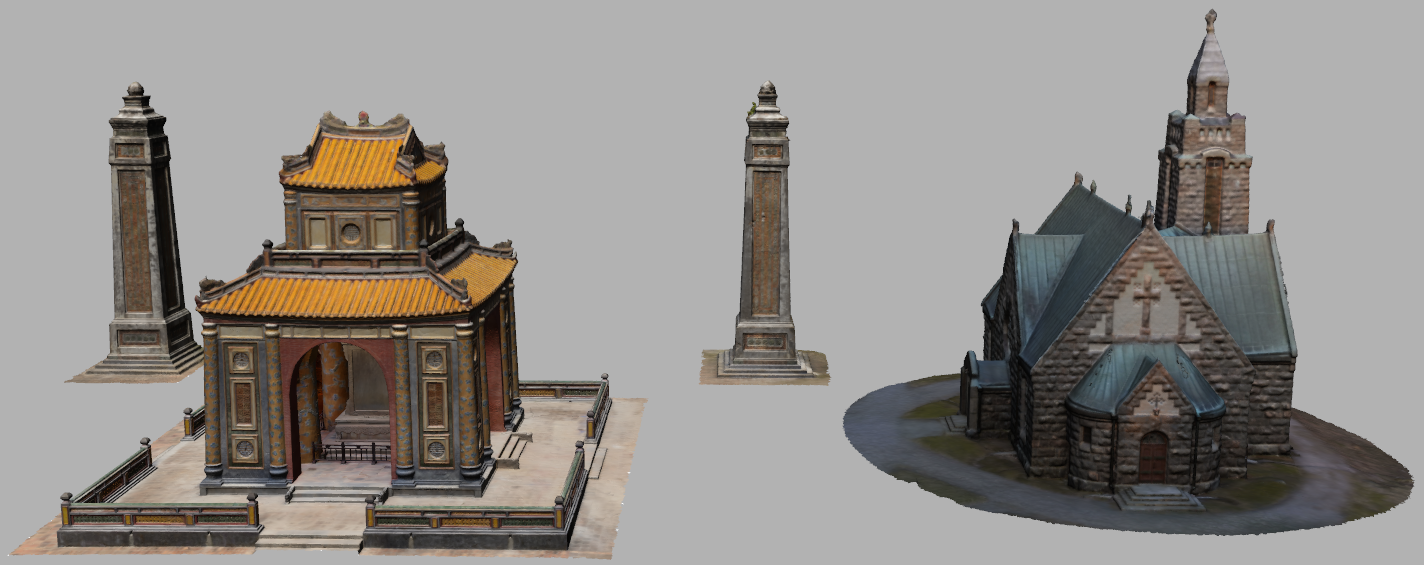
-
Models in
recon5.tar.xzfile (Mexico City Cathedral)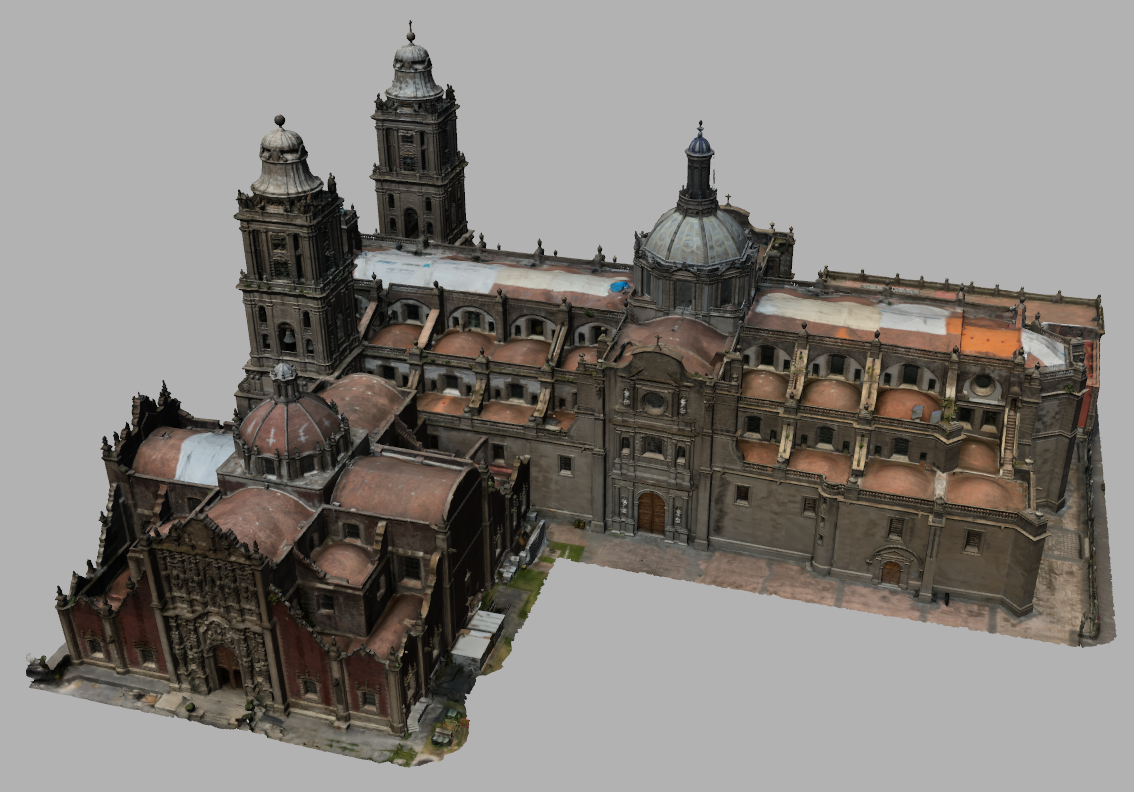





$ tar -xf name.tar.xz- Clone the git, add the folder in
GAZEBO_MODEL_PATH - (Necessary) Add
common modelsto environment first
$ git clone https://github.com/engcang/gazebo_maps
$ echo "export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:$(pwd)/gazebo_maps/common_models" >> ~/.bashrc- (Optional) add the wanted world to environment
$ echo "export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:$(pwd)/gazebo_maps/height_maze" >> ~/.bashrc
$ echo "export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:$(pwd)/gazebo_maps/3d_maze" >> ~/.bashrc
$ echo "export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:$(pwd)/gazebo_maps/large_mine_abandoned" >> ~/.bashrc
...
Add the world/model path you want!!
$ source ~/.bashrc- launch the
world
$ roslaunch gazebo_ros empty_world.launch world_name:=$(pwd)/gazebo_maps/small_maze/smaze2d.world
or
$ roslaunch gazebo_ros empty_world.launch world_name:=$(pwd)/gazebo_maps/3d_maze/eazy_maze.world
or
...
Launch the world/model you want!