 LIPSedge™ AE400 is an industrial GigE 3D camera with IP67 protection and powered by Intel® RealSense™ technology and designed for industrial applications, such as robot application, logistic/factory automation, and 3D monitoring/inspection.
LIPSedge™ AE400 is an industrial GigE 3D camera with IP67 protection and powered by Intel® RealSense™ technology and designed for industrial applications, such as robot application, logistic/factory automation, and 3D monitoring/inspection.
- Product Overview
- Product Datasheet
- Developer Support
- Product Videos
- AE400 360° Product View and Introduction
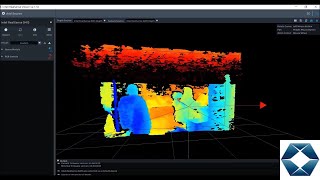
- AE400 Point Cloud
- AE400 360° Product View and Introduction

-
Prepare a Ubuntu 18.04 x64 desktop equipped with a NVIDIA video card that supports CUDA.
-
Install dependencies of desktop/Bazel/NVIDIA GPU Driver according to the following document:
- Download NVIDIA Isaac SDK from website:
Save Isaac SDK to the folder ~/Download, or any directory you preferred.
💡 The branch 'master' now supports the latest Isaac SDK 2019.3 and it requires jetpack43 for embedded side.
For users who want to stay at Isaac release 2019.2, please switch your working branch to 'isaac-2019.2'.
- You can get it isaac-sdk-2019-2-30e21124-tar-xz from NVIDIA download archive
- git clone the LIPS stereo_ae400 workspace by below commands:
$ cd ~/Download
$ git clone https://github.com/lips-hci/stereo_ae400.git
💡 This workspace now runs AE400 SDK 0.9.0.5 at host-side, and device firmware version 1.1. We will upgrade it soon! Please visit LIPS open-source community https://github.com/lips-hci to find more developer resources or contact us for support.
- How to switch between Intel and NVIDIA video cards on Ubuntu?
- If you want to install CUDA 10.0 manually, you can refer this one-click-install script.
- create a folder named 'issac' under ~/Downloads and untar the Isaac SDK into it
$ mkdir -p ~/Downloads/isaac
$ cd ~/Downloads
$ tar Jxvpf isaac-sdk-2019.2-30e21124.tar.xz -C isaac
- modify the path in the WORKSPACE under the stereo_ae400 folder.
local_repository(
name = "com_nvidia_isaac",
path = "/home/jsm/Downloads/isaac", # Here to sepcify your Issac SDK location, e.g. ~/Downloads/issac
)
- build the app under stereo_ae400 folder.
$ cd ~/Downloads/stereo_ae400
$ bazel build //app/ae400_camera
note: make sure your host can access to Internet, or you will get build errors
- IP address configuration
The default setting of AE400 camear is 192.168.0.100, however, you can assign new IP address to it via browser.
Input URL http://192.168.0.100 to open AE400 configuration page, log in, write new IP address and save setting

note: Check your product manual to find login account and password, or contact LIPS to get support
Configure the IP address for connecting AE400 by editing the network setting file
$ vi config/network.json
{
"config": {
"ip": "192.168.0.100" <= it should match AE400 camera's IP address
}
}
Then install the setting to your system
$ sudo mkdir -p /usr/etc/LIPS/lib
$ sudo cp config/network.json /usr/etc/LIPS/lib/
note: AE400 software looks for setting in system path /usr/etc/LIPS/lib/network.json. If file is missing, default IP address 192.168.0.100 is applied.
- run camera app by command-line.
$ bazel run //app/ae400_camera
note: make sure the host, AE400 camera, and the remote robot are at same network domain, so they can connect to each other.
- Open a web brower, connect to http://localhost:3000
From left panel, select ae400_camera checkbox to enable depth/color channels for streaming.
Isaac Sight webpage

- Enjoy!
You can run the app on remote robot like Jetson Nano or TX2
- Use below command on your host side.
# deploy.sh --remote_user <username_on_robot>
-p //app/ae400_camera:ae400_camera-pkg
-d <jetpack42 | jetpack43>
-h <robot_ip>
-u <insatll_home_name_you_want>
- For example:
$ ./deploy.sh --remote_user lips -p //app/ae400_camera:ae400_camera-pkg -d jetpack42 -h 192.168.0.100 -u dt
- Use below commands on your host side:
- make sure you have an SSH key on your desktop machine.
$ ssh-keygen
$ ssh-copy-id <username_on_robot>@<robot_ip>
note: use command ssh-copy-id to save your time typing password when loging in to robot by ssh.
- copy network.json to remote robot
$ scp config/network.json <username_on_robot>@<robot_ip>:~/
- ssh log in to remote robot
- install network setting
$ ssh <username_on_robot>@<robot_ip>
$ sudo mkdir -p /usr/etc/LIPS/lib
$ vi ~/network.json //optional, if you want to re-assign IP address for connection
$ sudo cp ~/network.json /usr/etc/LIPS/lib/
- run the app
$ cd ~/deploy/<install_home_name_you_want>/ae400_camera-pkg
$ ./app/ae400_camera/ae400_camera
-
open a web brower, connect to http://<robot_ip>:3000
-
from left panel, select ae400_camera checkbox to enable depth/color channels for streaming.