Learning A Room with the Occ-SDF Hybrid: Signed Distance Function Mingled with Occupancy Aids Scene Representation
Xiaoyang Lyu · Peng Dai · Zizhang Li · Dongyu Yan · Yi Lin · Yifan (Evan) Peng · Xiaojuan Qi
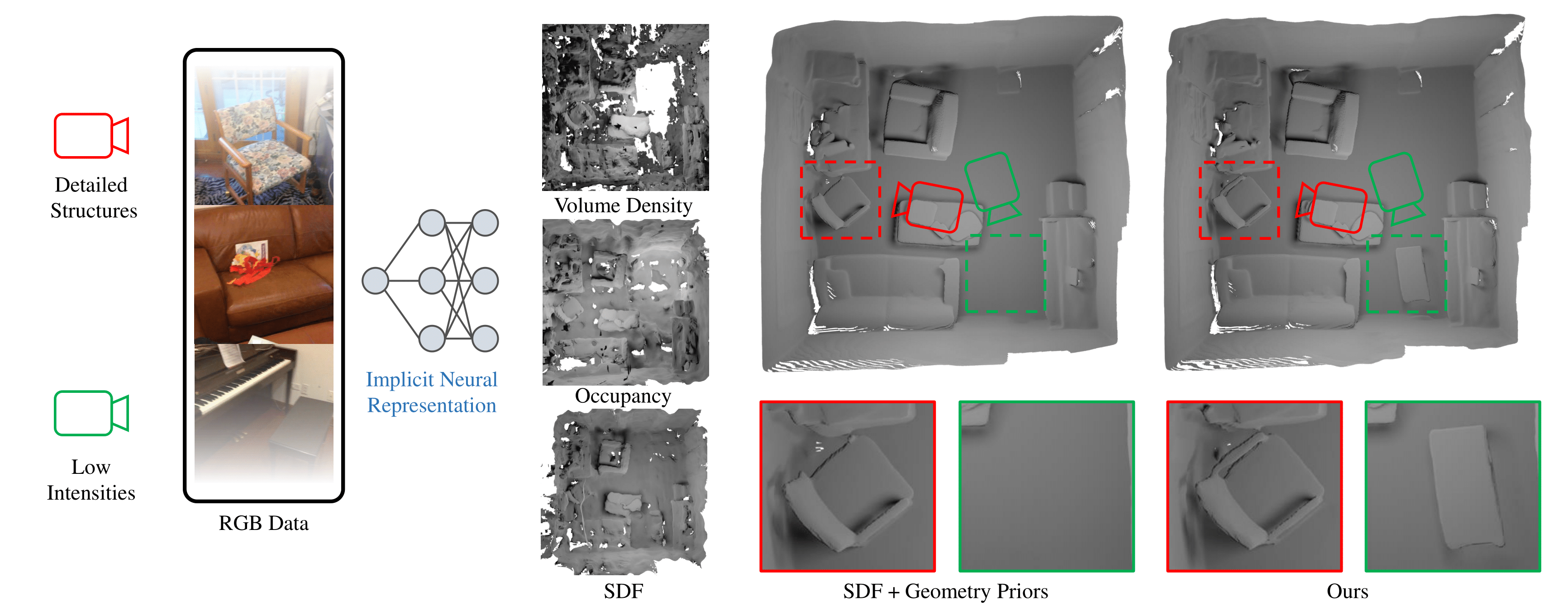
TL; DR: Implicit neural rendering has made impressive strides in the surface reconstruction of large-scale scenes. However, applyding previous method to reconstruct a room-level scene from images may miss structures in low-intensity areas and/or small, thin objects. We have conducted experimetns on three datasets to identify limitations of the original color rendering loss and priors-embedded SDF scene representation.
- Create the project page
- Create the README file
- Opensource all the training code
- Opensource all the models and meshes
- Replica data preparation scripts
- Real data preparation scripts
- MonoUNISURF and MonoVolSDF
Clone the repository and create an anaconda environment called occ-sdf using
git clone git@github.com:shawLyu/Occ-SDF-Hybrid.git
cd Occ-SDF-Hybrid
conda env create -f env.yaml
The hash encoder will be compiled on the fly when running the code.
This project mainly inherits from the MonoSDF, thus the dataset can be downloaded like Monosdf, through
bash scripts/download_dataset.sh
Run the following command to train OCC-SDF:
cd ./code
CUDA_VISIBLE_DEVICES=0 python -m torch.distributed.launch --nproc_per_node 1 --nnodes=1 --node_rank=0 training/exp_runner.py --conf CONFIG --scan_id SCAN_ID
where CONFIG is the config file in code/confs, and SCAN_ID is the id of the scene to reconstruct.
If you want to train the network on the single machine with different GPU, you can add --master_port <port_number>
We provide example commands for training Replica, ScanNet, and Tanks and Temples dataset as follows:
# Replica (room0)
CUDA_VISIBLE_DEVICES=0 python -m torch.distributed.launch --master_port 25585 --nproc_per_node 1 --nnodes=1 --node_rank=0 training/exp_runner.py --conf confs/replica_mlp_hybrid.conf --scan_id 1
# Scannet (scene_0050_00)
CUDA_VISIBLE_DEVICES=0 python -m torch.distributed.launch --master_port 25585 --nproc_per_node 1 --nnodes=1 --node_rank=0 training/exp_runner.py --conf confs/scannet_mlp_hybrid.conf --scan_id 1
# Tanks and Temples (MLP)
CUDA_VISIBLE_DEVICES=0 python -m torch.distributed.launch --master_port 25585 --nproc_per_node 1 --nnodes=1 --node_rank=0 training/exp_runner.py --conf confs/tnt_mlp_hybrid.conf --scan_id 1
# Tanks and Temples (Grids)
CUDA_VISIBLE_DEVICES=0 python -m torch.distributed.launch --master_port 25585 --nproc_per_node 1 --nnodes=1 --node_rank=0 training/exp_runner.py --conf confs/tnt_grids_hybrid.conf --scan_id 1
Evaluate on one scene (take scan 1 room0 for example)
cd replica_eval
python evaluate_single_scene.py --input_mesh replica_scan1_mesh.ply --scan_id 1 --output_dir replica_scan1
Evaluate all Replica Scenes:
cd replica_eval
python evaluate_avg.py
please check the script for more details.
cd scannet_eval
python evaluate_avg.py
please check the script for more details.
Please follow the MonoSDF for more details.
This project is built upon MonoSDF. We thank all the authors for their great work and repos.
If you find our code or paper useful, please cite
@inproceedings{Lyu2023occsdf,
title={Learning A Room with the Occ-SDF Hybrid: Signed Distance Function Mingled with Occupancy Aids Scene Representation},
author={Xiaoyang Lyu, Peng Dai, Zizhang Li, Dongyu Yan, Yi Lin, Yifan Peng, Xiaojuan Qi},
booktitle={Proceedings of the IEEE/CVF international conference on computer vision},
year={2023}
}