Tsinghua University
Download the data of ZJU-MoCap from NeuralBody and H36M from Animatable-NeRF (both projects are from ZJU).
We use the old version of the data to train and test our method. However, the new version of data provides better SMPL fitting which we think it could boost the performance of our method.
Store the data in data/, which are data/zju_mocap/ and data/h36m.
Preprocessing data to "pose_data.pt"
- Put SMPL neutral in
data/
# ZJU-Mocap
# for i in 313 315 377 386 387 390 392 393 394; do
for i in 313 315 377 386; do
python scripts/convert_smpl_params_to_pose_data.py --smpl_dir data/zju_mocap/CoreView_${i}/new_params --base_dir data/zju_mocap/CoreView_${i}/ --smpl_model_path ./data/SMPL_NEUTRAL.pkl
done
# H36M
for i in 1 5 6 9 11; do
echo $i
python scripts/convert_smpl_params_to_pose_data.py --smpl_dir data/h36m/S$i/Posing/new_params --base_dir data/h36m/S$i/Posing/ --smpl_model_path ./data/SMPL_NEUTRAL.pkl --interval 5
done
i=7
python scripts/convert_smpl_params_to_pose_data.py --smpl_dir data/h36m/S$i/Posing/new_params --base_dir data/h36m/S$i/Posing/ --smpl_model_path ./data/SMPL_NEUTRAL.pkl --interval 5 --num_frames 2916
i=8
python scripts/convert_smpl_params_to_pose_data.py --smpl_dir data/h36m/S$i/Posing/new_params --base_dir data/h36m/S$i/Posing/ --smpl_model_path ./data/SMPL_NEUTRAL.pkl --interval 5 --num_frames 1681Download the meshes Place them into tmp/quartet/meshes/.
Build docker image.
cd docker
./make_image.sh ema:v1
Start the container:
docker run -itd \
--name ema-container \
--gpus all \
-v $(realpath .):$(realpath .) \
-v $(realpath ./data/zju_mocap/):$(realpath .)/data/zju_mocap \
-v $(realpath ./data/h36m/):$(realpath .)/data/h36m \
-w $(realpath .) \
--network=host --ipc=host --ulimit memlock=-1 --ulimit stack=67108864 \
ema:v1 bash
docker exec -it ema-container bashDownload the checkpoint into OUR_DIR
OUT_DIR=outputs/demo/
# On 171
WANDB_MODE=offline python visualize_inference.py \
--config-dir ${OUT_DIR}/hydra_config/ \
--config-name config \
external_ckpt_dir=${OUT_DIR}/ \
validate=true \
display=null \
out_dir=outputs/visualize \
no_train=true \
pre_load=false \
background=grey \
num_val_examples=null \
learn_non_rigid_offset=false \
validate_dataset.0.frame_interval=1 \
validate_dataset.0.begin_frame_id=0 \
validate_dataset.0.num_frames=1000 \
validate_dataset.0.order_camera_first=False \
validate_dataset.0.no_image_inputs=True \
validate_dataset.1.frame_interval=1 \
validate_dataset.1.begin_frame_id=0 \
validate_dataset.1.num_frames=1000 \
validate_dataset.1.order_camera_first=False \
validate_dataset.1.no_image_inputs=True \
num_workers_validate=10Make sure everything is ok.
WANDB_MODE=offline \
python train_dyn.py exp_name=debug tet_dir=tmp/quartet/meshes/ lpips_loss_weight=1.0 iter=1 batch=1
We use wandb to minitor the performance. If you do not want to log with wandb, set WANDB_MODE=offline.
Use meta_configs, e.g., meta_configs/base_config-1.h36m.yaml and meta_configs/base_config-1.zju_mocap.yaml:
Example codes:
CUDA_VISIBLE_DEVICES=0 python scripts/config_sweeper.py -s train_dyn.py -f $META_CONFIG -n \
+train_dataset.texture_obj_path=data/toy_data_zju_format/SMPL/SMPL_female_default_resolution.obj +train_dataset.force_generate_synthesis_data=false train_dataset._target_=dataset.zju_mocap_synthesis.DatasetZJUMoCapSynthesis +validate_dataset.0.texture_obj_path='data/toy_data_zju_format/SMPL/SMPL_female_default_resolution.obj' validate_dataset.0._target_=dataset.zju_mocap_synthesis.DatasetZJUMoCapSynthesis +validate_dataset.0.force_generate_synthesis_data=false +validate_dataset.1.texture_obj_path='data/toy_data_zju_format/SMPL/SMPL_female_default_resolution.obj' validate_dataset.1._target_=dataset.zju_mocap_synthesis.DatasetZJUMoCapSynthesis +validate_dataset.1.force_generate_synthesis_data=false \
+train_dataset.noise_scale=0.01 +train_dataset.add_noise=true
python scripts/config_sweeper.py -g='(5,)' -s train_dyn.py -f $META_CONFIG -n \
+train_dataset.texture_obj_path=data/toy_data_zju_format/SMPL/SMPL_female_default_resolution.obj +train_dataset.force_generate_synthesis_data=false train_dataset._target_=dataset.zju_mocap_synthesis.DatasetZJUMoCapSynthesis +validate_dataset.0.texture_obj_path='data/toy_data_zju_format/SMPL/SMPL_female_default_resolution.obj' validate_dataset.0._target_=dataset.zju_mocap_synthesis.DatasetZJUMoCapSynthesis +validate_dataset.0.force_generate_synthesis_data=false +validate_dataset.1.texture_obj_path='data/toy_data_zju_format/SMPL/SMPL_female_default_resolution.obj' validate_dataset.1._target_=dataset.zju_mocap_synthesis.DatasetZJUMoCapSynthesis +validate_dataset.1.force_generate_synthesis_data=false \
+train_dataset.noise_scale=0.2 +train_dataset.add_noise=truemay need to use +no_mesh_export. backward incompatible
OUT_DIR=/path/to/results
WANDB_MODE=offline \
CUDA_VISIBLE_DEVICES=0 \
python train_dyn.py --config-dir ${OUT_DIR}/.hydra/ --config-name config \
external_ckpt_dir=${OUT_DIR}/ckpts/ \
display=null \
validate=true \
compute_val_metrics=false \
save_val_images=false \
no_train=true \
no_mesh_export=true \
learn_non_rigid_offset=true \
num_workers_validate=10 \
out_dir='outputs/${exp_name}/eval/${subject_id}/${now:%y%m%d_%H%M%S}' \
+runtime_breakdown=True \
validate_dataset.0.frame_interval=1 \
validate_dataset.0.begin_frame_id=0 \
validate_dataset.0.num_frames=10 \
validate_dataset.0.order_camera_first=False \
validate_dataset.1.frame_interval=1 \
validate_dataset.1.begin_frame_id=0 \
validate_dataset.1.num_frames=10 \
validate_dataset.1.order_camera_first=False \
num_workers_validate=10 \
+validate_update_base_mesh=True \
++learning_rate_schedule_type=linear \
++learning_rate_schedule_steps=[] \
++mask_at_box_bound_pad=0.0 \
++use_vitruvian_pose=true \
subject_id=??? # for efficiency overrite subject_id
+dataset@_global_=???First install bc: apt-get install bc
Then run metrics: bash scripts/compute_avarge_metric.sh
python scripts/metric_psnr_ssmi_lpips.py \
-t outputs/.../opt \
-g outputs/.../ref \
--exp_name metric \
--log_file tmp/metrics.logOUT_DIR=
MESH_PATH=
MTL_PATH=null
WANDB_MODE=offline \
CUDA_VISIBLE_DEVICES=0 \
python demo_mesh_rendering.py --config-dir ${OUT_DIR}/.hydra/ --config-name config \
external_ckpt_dir=${OUT_DIR}/ckpts/ \
display=null \
validate=true \
compute_val_metrics=false \
save_val_images=true \
no_train=true \
no_mesh_export=true \
learn_non_rigid_offset=true \
out_dir='outputs/${exp_name}/mesh/${subject_id}/${now:%y%m%d_%H%M%S}' \
use_mesh=True \
learn_mesh_skinning=True \
learn_mesh_material_with_mlp=True \
++external_mtl_path=$MTL_PATH \
++use_tet_aabb_in_mesh=true \
++external_mesh_path=$MESH_PATH
OUT_DIR=path/to/results
MESH_PATH=tmp/230308.demo_mesh/mesh.uv_unwarp-manually.obj
MTL_PATH=tmp/230308.demo_mesh/sunflower.mtl
AIST
OUT_DIR=
WANDB_MODE=offline \
CUDA_VISIBLE_DEVICES=0 \
python demo_mesh_rendering.py --config-dir ${OUT_DIR}/.hydra/ --config-name config \
external_ckpt_dir=${OUT_DIR}/outlier_ckpts/ \
display=null \
validate=true \
compute_val_metrics=false \
save_val_images=true \
no_train=true \
no_mesh_export=true \
learn_non_rigid_offset=true \
out_dir='outputs/${exp_name}/aist/${subject_id}/${now:%y%m%d_%H%M%S}' \
use_mesh=False \
learn_mesh_skinning=True \
learn_mesh_material_with_mlp=True \
++external_mtl_path=null \
++use_tet_aabb_in_mesh=true \
++use_vitruvian_pose=True \
+dataset@_global_=demo/aist-h36m.yaml
OUT_DIR=path/to/results
# aist gBR_sBM_cAll_d04_mBR1_ch10
# 01 left right cross hand
# 02 left right cross legs
# 03 swimming
# 04 left right
# 05 left right and touch ground
# 06 left right cross hand
# 07 slip on the ground
# 08 slip on the ground
# 09
+dataset@_global_=demo/aist-h36m.yaml aist_pose_pkl_path=data/aist/motions/
gBR_sBM_cAll_d04_mBR0_ch04
gWA_sBM_cAll_d25_mWA1_ch02
gLH_sFM_cAll_d16_mLH5_ch06
gLO_sBM_cAll_d14_mLO5_ch02
gMH_sBM_cAll_d24_mMH2_ch08
gWA_sFM_cAll_d26_mWA3_ch11If you find this repository useful, please consider giving a star ⭐ and citation 🦖:
@article{Huang2023EMA,
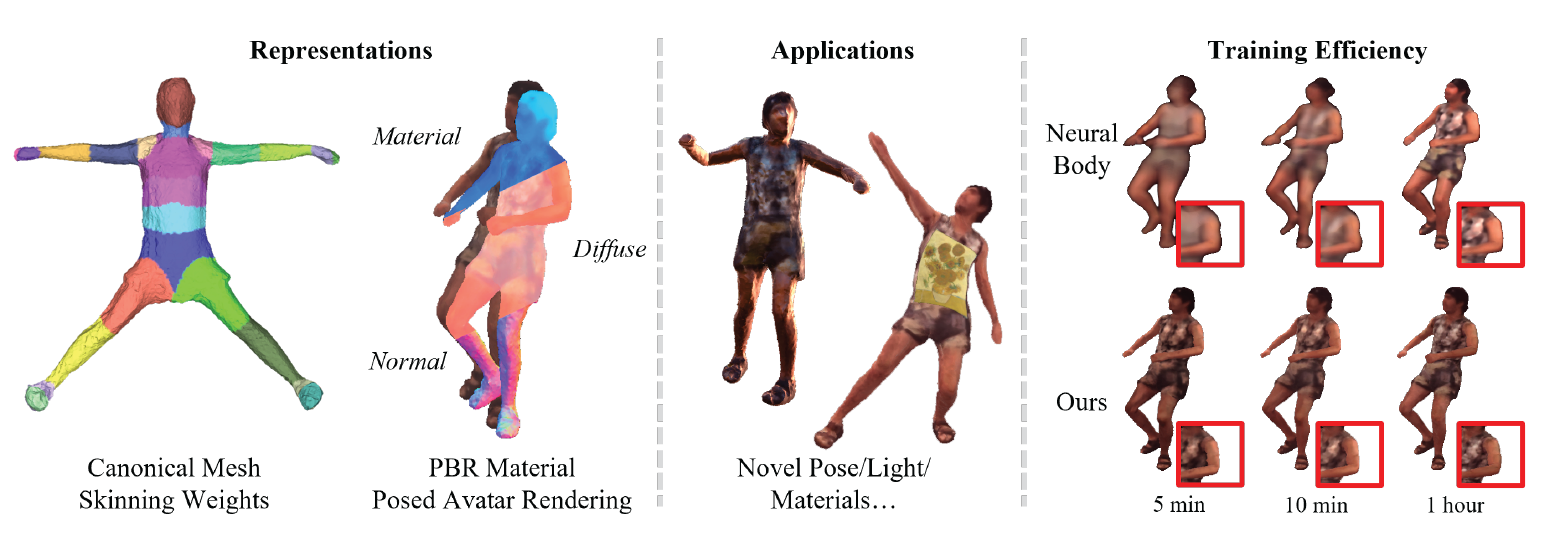
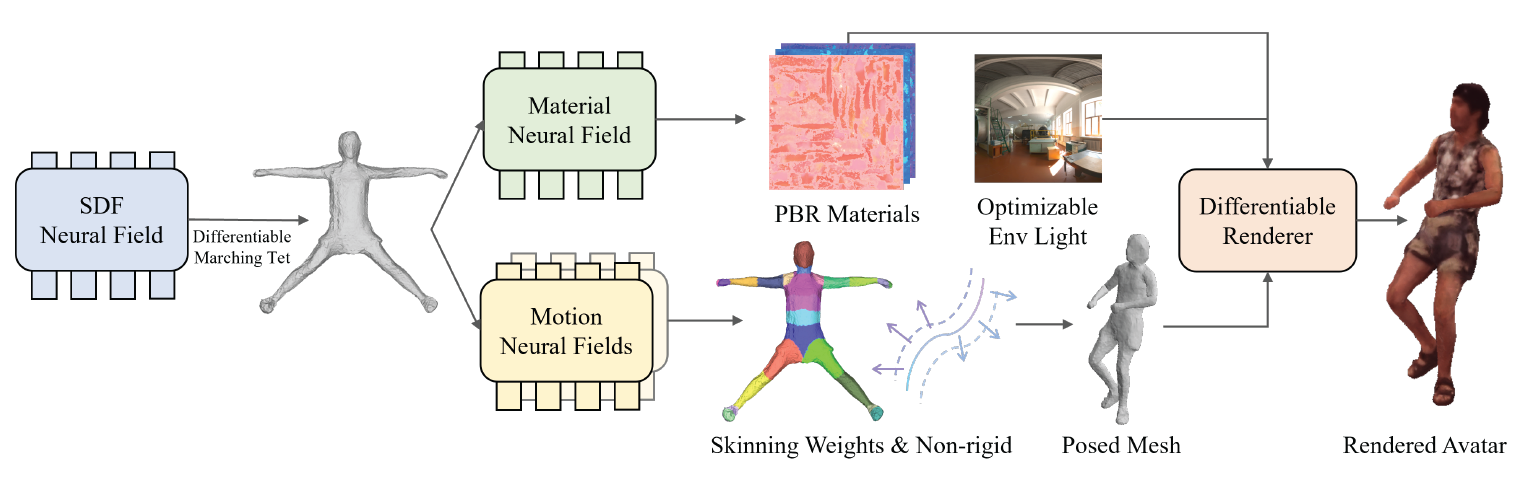
title={Efficient Meshy Neural Fields for Animatable Human Avatars},
author={Xiaoke Huang and Yiji Cheng and Yansong Tang and Xiu Li and Jie Zhou and Jiwen Lu},
journal={arXiv},
year={2023},
volume={abs/2303.12965}
}