micro:bit是易创空间 专门针对micro:bit而开发的驱动大电流电机,舵机,步进电机的一款多功能电机驱动扩展板。解决了市面上同类驱动板支持单节3.7V电池驱动力严重不够问题。本驱动板采用DC-DC电源方案,支持DC(6~36V)宽电压输入,最大输出3A电流。驱动芯片采用4颗大电流驱动芯片H450,最大驱动电流达3.5A,轻松同时驱动4个24V直流马达或者30暴力高速马达。舵机可以通过外部电源独立供电,同时可以支持8个舵机同时控制。板子采用主板平躺设计,安装孔兼容乐高,可以非常方便安装在自己创意设计中。完善的库支持,配套开发有makecode,scratch3.0,mixly,python库和教程。
- 供电方式有接线柱和DC头,可通过开关自由选择,亦可双供电
- 强力电机和舵机驱动芯片,驱动力强劲
- 包含多种电压引脚,满足大多数场景需要
- 与乐高兼容,通过不同的积木搭建、配合motor:bit实现更好更多更富创造性的功能,充分发挥学生的创造力
- 同时支持驱动8路舵机和4路直流电机
- 支持驱动2路5线步进电机
- 板载4个RGB全彩灯,无源蜂鸣器
- 板载红外接收头,通过红外遥控器实现红外线远程控制
- 一个PH2.0-4Pin RGB超声波接口,接口防反插
- PCB板厚度:1.6mm
- 大圆孔直径:4.6mm
- 产品的尺寸:80mm×57mm×12mm
- 净重:37.2g
- 输入电压:6~36V
motor:Bit 多功能扩展板与micro:Bit 主板




- motor:bit 有两个供电接口,一个接线柱类型( + 表示接电源正极线:— 表示接电源负极线),一个DC头类型。在使用接线柱供电时,注意电源正负极的连接方向,扩展板接线柱的 + 符号所代表的接线口表示应该连接电源正极线、— 符号所代表的接线口表示应该连接电源负极线
- 拨动开关向右拨动到OFF(EXT)时,motor:bit 扩展板是通过接线柱供电的,此时,DC头供电接口无效:拨动开关向左拨动到ON(DC)时,motor:bit 扩展板是通过DC头接口供电,此时若VSS接线帽接在5V上,接线柱供电接口无效,若VSS接线帽接在 + 上,那么VSS的供电是通过接在接线柱的电源直接供电,从而实现一块板、两个供电源
- motor:bit 扩展板包含3V3,5V电源引脚,此外,还设计有一个VIN引脚,VIN引脚通过开关与供电源直接连接,VIN引脚于开关选择的供电源连接
- motor:bit 扩展板的红色引脚,皆为正极供电引出脚:黑色引脚皆为接地GND引脚

- motor:bit板载无源蜂鸣器,motor:bit上的蜂鸣器接线引脚为P0,通过对蜂鸣器输出不同频率的信号,从而控制蜂鸣器播放音乐。
- motor:bit 是通过跳线帽于microbit主板的P0引脚进行连接的,当拔掉蜂鸣器的跳线帽时,引脚P0不能控制板载蜂鸣器,此时P0引脚可以作为普通IO引脚使用。
无源蜂鸣器播放音乐 例程实验

实验现象为:当按下micro:bit 主板的按钮A 播放 生日歌: 当按钮B按下时,播放 铃声蜂鸣器实验源码

- motor:bit 板载有一颗红外接收头,可以通过拖拉相应的程序积木块设定相应的功能,再使用emakefun红外遥控器来进行控制。
- 红外接收头的引脚为P1,注意、红外接收头的跳线帽,在使用红外遥控功能时,红外接收头的跳线帽应当插上(默认是插上),当跳线帽拔下时,P1引脚为普通IO口引脚。
红外接收实验例程

实验现象为:红外遥控器按键
A按下时,micro:bit 主板显示字母 “A”,按键B按下时、micro:bit主板显示字母“B”,按键C按下时、micro:bit 主板显示字母“C” 红外实验源码

- motor:bit 板载4个RGB全彩灯,连接在microbit主板的P16引脚,可以通过对P16引脚编程控制四个RGB灯亮灭和颜色。
板载RGB实验例程

RGB流水灯实验设计 ,实验结果为:板载RGB灯变为绿色流水灯 RGB实验源码

- motor:bit扩展板设计有4个直流电机接线柱接口,分别为:A01和A02 ,A03和A04,B01和B02,B03和B04。在进行电机接线时,电机的两条线要和引脚相对应。在使用接线柱接线时,可以使用螺丝刀通过旋转接线柱螺丝压紧或松开电机线。
- 在直流电机接线时,注意两条线的接线相对位置,不同的接线,程序实现的旋转方向不同。假如直流电机的红色线接在A01、黑色线接在A02、刷入程序电机顺时针(和电机正负接线有关)旋转:当电机的红色线接在A02、黑色线接在A01、那么刷入相同的程序,电机是逆时针旋转的
控制直流电机例程实验

实物接线图(DC供电口供电,开关拨动到on(DC))

实验结果:当microbit主板的A按键被按下、接在A01和A02引脚的电机顺时针/或逆时针(与接线方向有关)转,按键B被按下、电机反方向转 直流电机实验源码

- motor:bit 同时支持驱动8路PWM舵机,扩展版上舵机的接口规格统一,方便接线
- motor:bit 舵机引脚的蓝色插口代表输出pwm信号的引脚、连接三线舵机的PWM输入信号线,红色插口代表电源正极、连接三线舵机的电源正极线,黑色插口代表电源GND极、连接三线舵机的电源负极线。
- 插口为S1~S8,在使用时,根据实际连接的插口,在程序积木中进行选择。
- Motor:Bit驱动舵机时,可以通过跳线帽选择不同的供电方式。如果大舵机(例如:MG996等)的数量超过4个时,蓝色接线柱必须接外部电源为舵机供电(外部供电电压和电流需要根据舵机型号需要提供),且DC头也需要接电源为扩展板供电,拨动开关拨向ON端。
实物连接图如下

舵机控制实验例程

实物连接图,例程实验选择S1引脚,实物连接也接在S1引脚

控制舵机转动到角度160,延时200ms,以速度3再转动到角度30,延时200ms,如此循环,,, 舵机实验源码
- 包含2路5线步进电机、可以同时连接控制两个步进电机。接线从左到右依次为蓝色线、粉色线、黄色线、橙色线、红色线。
- 支持步进电机与TT马达同时使用,例如可以控制一个步进电机和两个直流电机(具体搭配可以根据需要来进行设定)
步进电机实验例程

实物连接图,例程实验选择STPM1_2引脚,实物连接也接在相应的引脚,注意不同引脚接线的颜色

步进电机驱动实验,实验结果为:接在STPM1_2引脚的步进电机转动50°,停止延时500ms,再转动,如此循环 步进电机实验源码

- 1个PH2.0-4Pin Rgb超声波(RUS-04)模块接口,该接口有两个用途,一方面可以作为超声波的TX和RX引脚口,另一方面也可以控制超声波模块的RGB彩灯,让超声波模块更加炫彩灵性。
- RGB超声波的IO引脚接在引脚的P2接口,RGB口与RGB口对应:RGB超声波的RGB灯是扩展板灯的延伸,都是通过P16引脚控制,控制原理与控制扩展板RGB灯相同,RGB超声波内含有六个RGB灯,左右探头各三个。
- 超声波的RGB彩灯,可以选择控制左右,显示的颜色和显示的特效,其中特效包括呼吸灯、旋转流星、闪烁。
超声波RGB使用例程实验

实物连接图,RGB超声波的引脚选择P2

当超声波检测到前方距离小于10cm时,超声波的RGB灯 全部会显示靛蓝,并且有闪烁的特效 RGB超声波实验源码

- 8个引出的IO口,黑色引脚表示电源负极、红色引脚表示电源正极(3V3/5V),蓝色表示IO信号口
- 引出的引脚是P0\P1\P2\P8\P12\P13\P14\P15

- motor:bit扩展版包含1个PH2.0-4Pin i2c接口,可以使用该接口来控制 1602液晶等。在使用I2C通信时,应注意扩展版的数据线SDA引脚连接终端数据线SDA引脚,扩展版的时钟线SCL引脚连接终端的时钟线SCL引脚
- 不同的I2C模块需要的电压不同,可以通过IO电压选择跳线帽对I2C红色引脚的电压进行调整
I2C使用例程(控制LCD1602显示)

实验实物图,在接线时,需要注意LCD1602液晶的SDA引脚接在扩展板的SDA引脚、SCL引脚接在扩展板的SCL引脚、GND引脚接在扩展板的黑色GND引脚、VCC引脚接在扩展板的红色5V引脚,不同的I2C模块需要的电压不同,LCD1602液晶需要5V(注意调节液晶背面的旋钮、以调整显示效果达到最好的显示)

实验现象为:LCD1602液晶第一行显示**
Hello! emakefun!** ,第二行显示**2019** LCD1602液晶实验源码

- motor:bit 扩展板设计有三种电压引脚,分别为3V3、5V、VIN(+,没有经过降压的电压接口)
- 对于8个IO口、可以通过IO口跳线帽进行选择不同的电压:对于8个PWM舵机接口,可以通过跳线帽选择不同的电压,需要注意,当选择5V的时候,供电来源于开关选择的电源直接相关,选择‘ +’ 的时候,供电来源为接线柱电源,与开关选择无关
- 点击makecode 进入编程官网
- 点击黑色箭头指向的**
新建项目** ,进入到编程界面

- 点击**
高级—>扩展—>输入网址https://github.com/emakefun/pxt-motorbit.git**点击搜索—>点击motorbit包





- 点击**
下载**, 红色箭头所指的按扭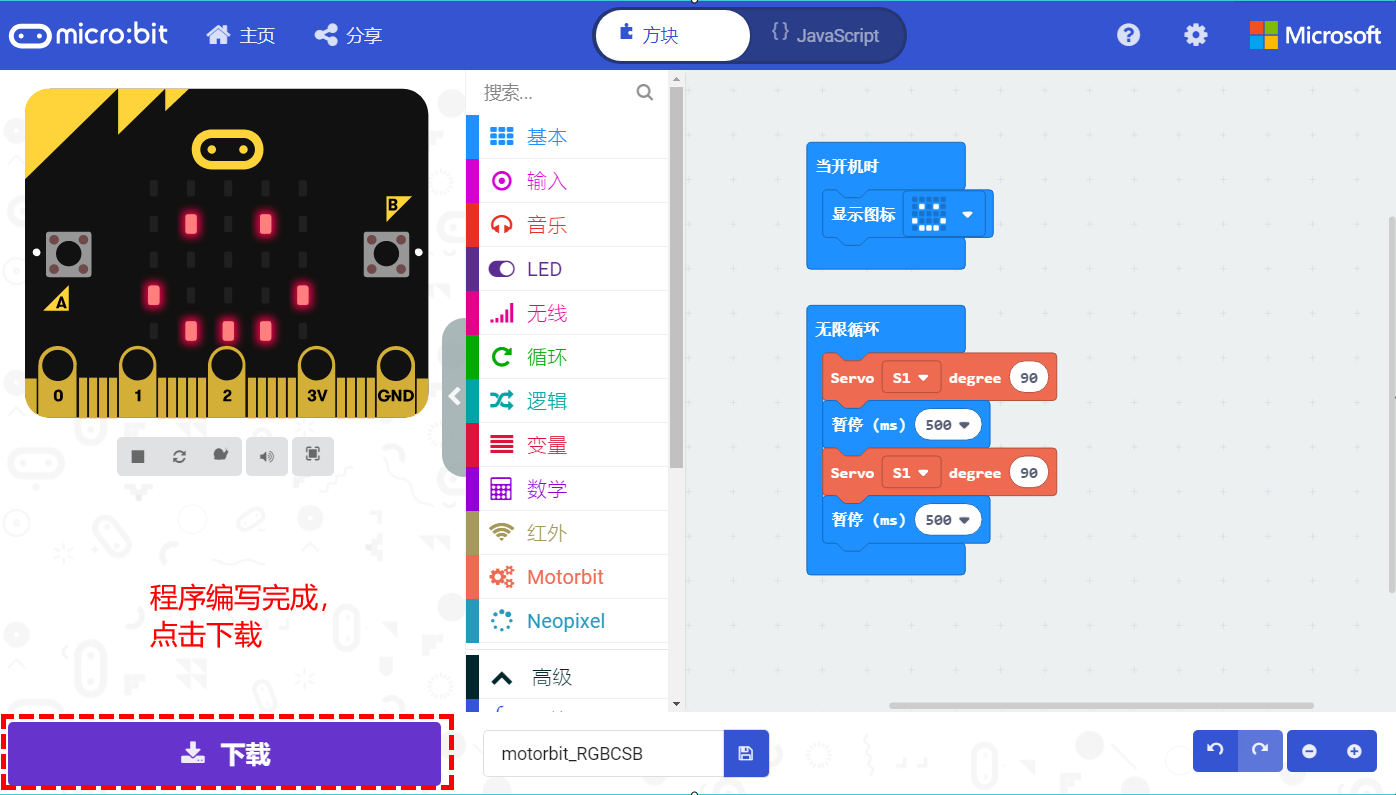

- 选择**
MICROBIT**,点击确定 (使用的是QQ浏览器进行在线的下载)

- 点击下载(只要把microbit程序文件下载或保存到microbit主板的名为**
MICROBIT**的内存盘,程序就会在microbit中运行)

如果需要支持python语法,需要下载最新固件到microbit
- 直流电机控制:
dcmotor_run(index, speed) # index: 1/2/3/4(电机序号), speed: -255~255 (电机速度) dcmotor_stop(index) # 停止直流电机 index: 1/2/3/4 (电机序号)
#1号电机以150的速度正转 2号电机以200的速度反转
import motor
motorbit = motor.init()
motorbit.dcmotor_run(1, 150) # 支流电机M1 正向转动速度150
motorbit.dcmotor_run(2, -200) # 支流电机M1 反向向转动速度200
sleep(2000)
motorbit.dcmotor_stop(1)
motorbit.dcmotor_stop(2)
- 步进电机运动:
stepper(index, degree) # index: 1/2 (步进电机序号) , degree: -360~360 (转动角度)
# 控制1号步进电机转动150度
import motor
motorbit = motor.init()
motorbit.stepper(1, 150)
- PWM舵机控制:
servo(index, degree, speed=10) inedx: 1/2/3/4/5/6/7/8 (舵机序号,分别对应s1/s2/s3/s4/s5/s6/s7/s8) , degree: 0
180 (角度方位) , speed: 110(舵机转动速度, 可以不输入)
# 控制连接在S1引脚的舵机转动到90°位置
import motor
motorbit = motor.init()
motorbit.servo(1, 90)
#控制连接在S1引脚的舵机以 5 速度转动到90°位置
import motor
motorbit = motor.init()
motorbit.servo(1, 90, speed=5)