Trajectory-Aware Body Interaction Transformer for Multi-Person Pose Forecasting
Xiaogang Peng, Siyuan Mao, Zizhao Wu*
|
|
- [2023/2/28]: Our paper is accepted by CVPR 2023. Thanks to my collaborators!
- [2023/4/20]: Initial code releases.
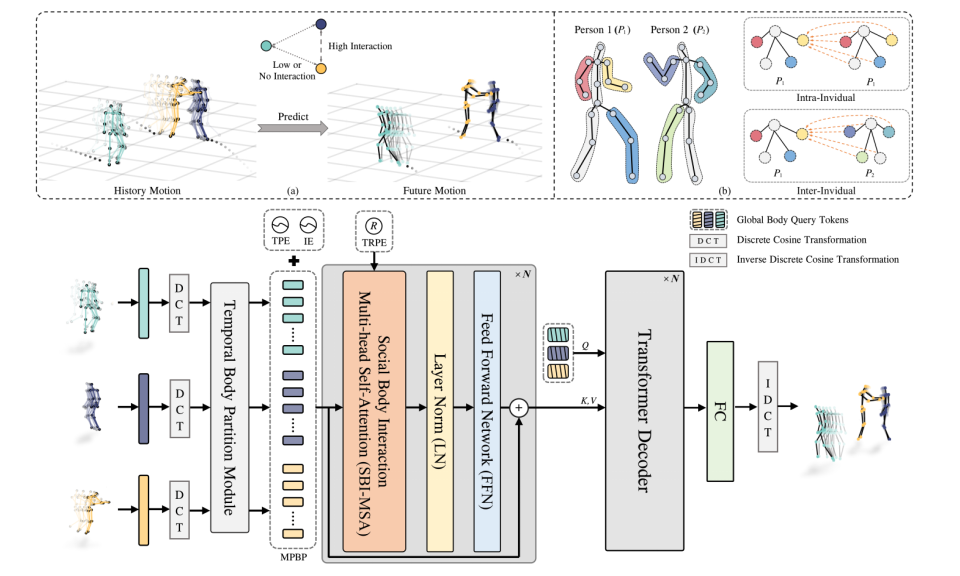
Multi-person pose forecasting remains a challenging problem, especially in modeling fine-grained human body interaction in complex crowd scenarios. Existing methods typically represent the whole pose sequence as a temporal series, yet overlook interactive influences among people based on skeletal body parts. In this paper, we propose a novel Trajectory-Aware Body Interaction Transformer (TBIFormer) for multi-person pose forecasting via effectively modeling body part interactions. Specifically, we construct a Temporal Body Partition Module that transforms all the pose sequences into a Multi-Person Body-Part sequence to retain spatial and temporal information based on body semantics. Then, we devise a Social Body Interaction Self-Attention (SBI-MSA) module, utilizing the transformed sequence to learn body part dynamics for inter- and intra-individual interactions. Furthermore, different from prior Euclidean distance-based spatial encodings, we present a novel and efficient Trajectory-Aware Relative Position Encoding for SBI-MSA to offer discriminative spatial information and additional interactive clues. On both short- and long-term horizons, we empirically evaluate our framework on CMU-Mocap, MuPoTS-3D as well as synthesized datasets (6 ~ 10 persons), and demonstrate that our method greatly outperforms the state-of-the-art methods.
Pipeline:
Prediction Results:


We mostly follow the preprocessing procedure of MRT for mixing dataset. Due to the mixing has random operations, we have uploaded the mixed dataset and others for your convenience and fair comparision. The datasets can be downloade from . Please prepare the data like this:
project_folder/
├── checkpoints/
│ ├── ...
├── data/
│ ├── Mocap_UMPM
│ │ ├── train_3_75_mocap_umpm.npy
│ │ ├── test_3_75_mocap_umpm.npy
│ │ ├── test_3_75_mocap_umpm_shuffled.npy
│ ├── MuPoTs3D
│ │ ├── mupots_150_2persons.npy
│ │ ├── mupots_150_3persons.npy
│ ├── mix1_6persons.npy
│ ├── mix2_10persons.npy
├── models/
│ ├── ...
├── utils/
│ ├── ...
├── train.py
├── test.py
python train.py
python test.py
Many thanks to the previous projects:
Related Projects:
- iRPE (orignal code of piecewise index fuction)
If this work is helpful for your research, please consider citing the following BibTeX entry.
@InProceedings{peng2023trajectory,
author = {Peng, Xiaogang and Mao, Siyuan and Wu, Zizhao},
title = {Trajectory-Aware Body Interaction Transformer for Multi-Person Pose Forecasting},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2023},
pages = {17121-17130}
}
Our code is under MIT protocol.