201744005 김경은
201744020 박지석
201644034 정우영
- 프로젝트 개요
- 개발 배경/목표
- 주요 기능
- 설계
- 개발 준비
- 제작 재료 목록
- 개발 일정
- 개발 과정
- 개발 환경
- 구현 과정
- 문제 해결
- 개발 결과
- 결과 화면
- 개선 방향
-
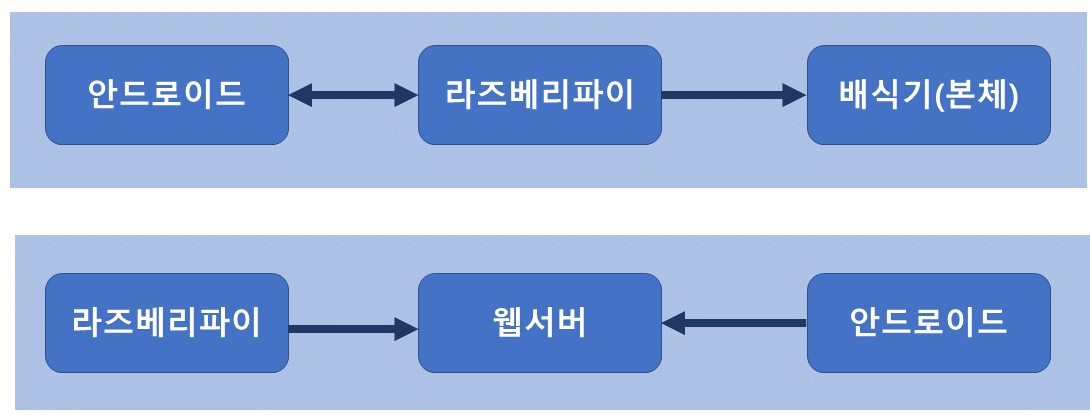
- 어플을 이용해 사료 배급이 가능하고 카메라를 통해 실시간으로 반려동물을 확인할 수 있는
화면으로 이루어진 애플리케이션
- 어플을 이용해 사료 배급이 가능하고 카메라를 통해 실시간으로 반려동물을 확인할 수 있는
-
- 어린 강아지 같은 경우 항상 일정한 시간에 개월 수에 따라 급식해야하는 사료랑이 다른데
이를 스마트 자동 급식기를 사용하면 밖에서도 편리하게 관리 가능 - 최근 반려동물을 기르는 1인 가구가 증가함에 따라 약속, 야근등과 같은 반려동물이 불가피하게
혼자 있어야 할 상황에 대비하기 위해
- 어린 강아지 같은 경우 항상 일정한 시간에 개월 수에 따라 급식해야하는 사료랑이 다른데
-
- 원격지원을 통한 다양한 반려동물 케어 서비스 제공
-
- 앱 내부의 버튼을 통한 사료 배식 기능
- 앱 내부의 화면을 통한 실시간 반려동물 확인 및 관리 기능
-


-
재료 구매주소 수량 가격대 라즈베리파이 실습용 1 실습용 L298N 모터 드라이버 실습용 1 실습용 DC 모터 실습용 1 실습용 캠 실습용 1 실습용 급식기 https://url.kr/w3laor 1 17,400 -
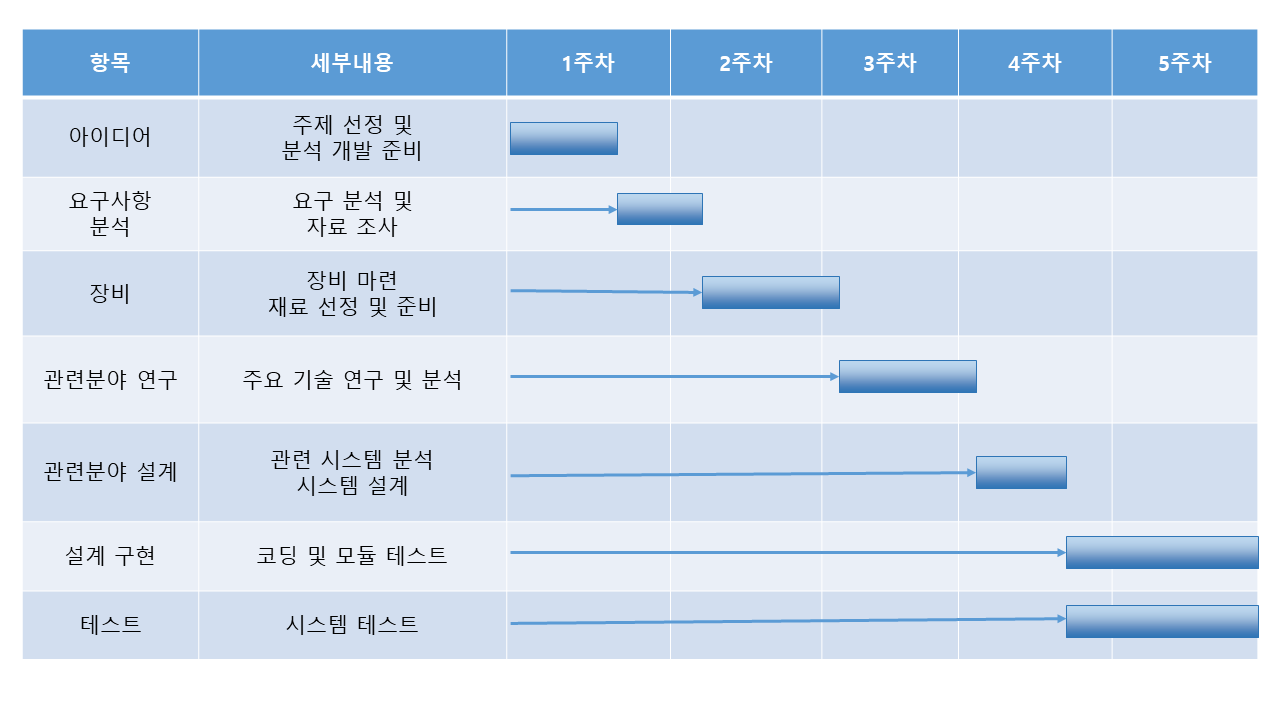
항목 세부내용 및 개발 항목 개발자 시작일 종료일 아이디어 주제 선정 및 분석 개발 준비 김경은 11/8 11/11 요구사항 분석 요구 분석 및 자료 조사 팀 전원 11/12 11/15 장비 장비 마련, 재료 선정 및 준비 팀 전원 11/16 11/22 관련분야 연구 주요 기술 연구 및 분석 팀 전원 11/23 11/28 관련분야 설계 관련 시스템 분석, 시스템 설계 김경은 11/29 12/2 설계 구현 코딩 및 모듈 테스트 박지석, 정우영 12/3 12/9 테스트 시스템 테스트 팀 전원 12/3 12/9 -

-
- Raspbian: 라즈베리파이에 최적화, Xwindow를 사용할 수 있는 OS
- VNC Viewer: 라즈베리를 원격으로 다루기 위해 사용하는 원격 데스크톱 클라이언트
- GitHub: 소프트웨어 개발 프로젝트를 위한 소스코드 관리서비스, 버전 관리를 위해 사용
- AndroidStudio: 안드로이드 전용 어플(앱) 제작을 위한 통합 개발 환경(IDE)
-
-
- 소켓 서버
import socket from subprocess import call HOST = "" PORT = 8282 s = socket.socket(socket.AF_INET, socket.SOCK_STREAM) print ('Socket created') s.bind((HOST, PORT)) print ('Socket bind complete') s.listen(1) print ('Socket now listening') while True: #접속 승인 conn, addr = s.accept() print("Connected by ", addr) #데이터 수신 data = conn.recv(1024) data = data.decode("utf8").strip() if not data: break print("Received: " + data) #수신한 데이터로 파이를 컨트롤 res = do_some_stuffs_with_input(data) print("파이 동작 :" + res) #클라이언트에게 답을 보냄 conn.sendall(res.encode("utf-8")) #연결 닫기 conn.close() s.close() -
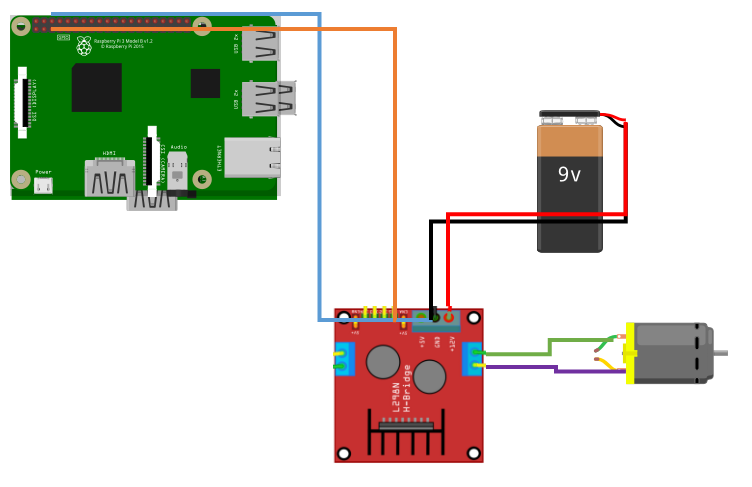
- ServoBlaster 설치
pi@raspberrypi:~ $ sudo git clone https://github.com/richardghirst/PiBits- echo 명령어로 모터 제어
pi@raspberrypi:~ $ echo 0=150 > /dev/servoblaster- 서버파일에 ServoBlaster 코드 추가
def do_some_stuffs_with_input(input_string): pan_pos=0 max_pos=300 // 라즈베리파이를 컨트롤할 명령어 설정 if input_string == "FEED": pan_pos +=250 if pan_pos >=max_pos: pan_pos =max_pos input_string = "사료를 배급합니다.." call("echo 0="+str(pan_pos)+" > /dev/servoblaster", shell= True) else : input_string = input_string + " 없는 명령어 입니다." return input_string -
- 스트리밍 프로그램 motion 설치
pi@raspberrypi:~ $ sudo apt-get install motion- motion service 실행
pi@raspberrypi:~ $ sudo service motion start- 스트리밍 화면 확인
http://[라즈베리파이IP주소]:[포트번호]

-
-




-







-
- 사료배급 어플 화면
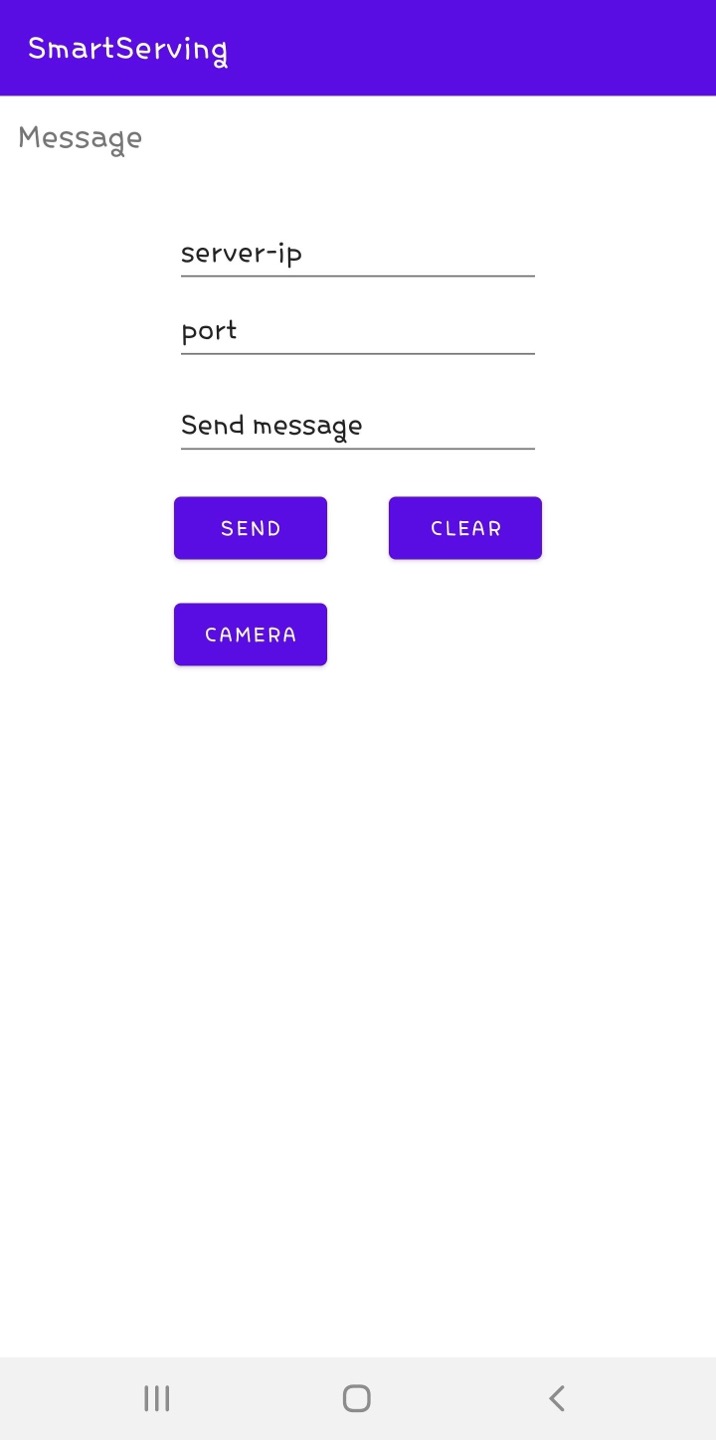
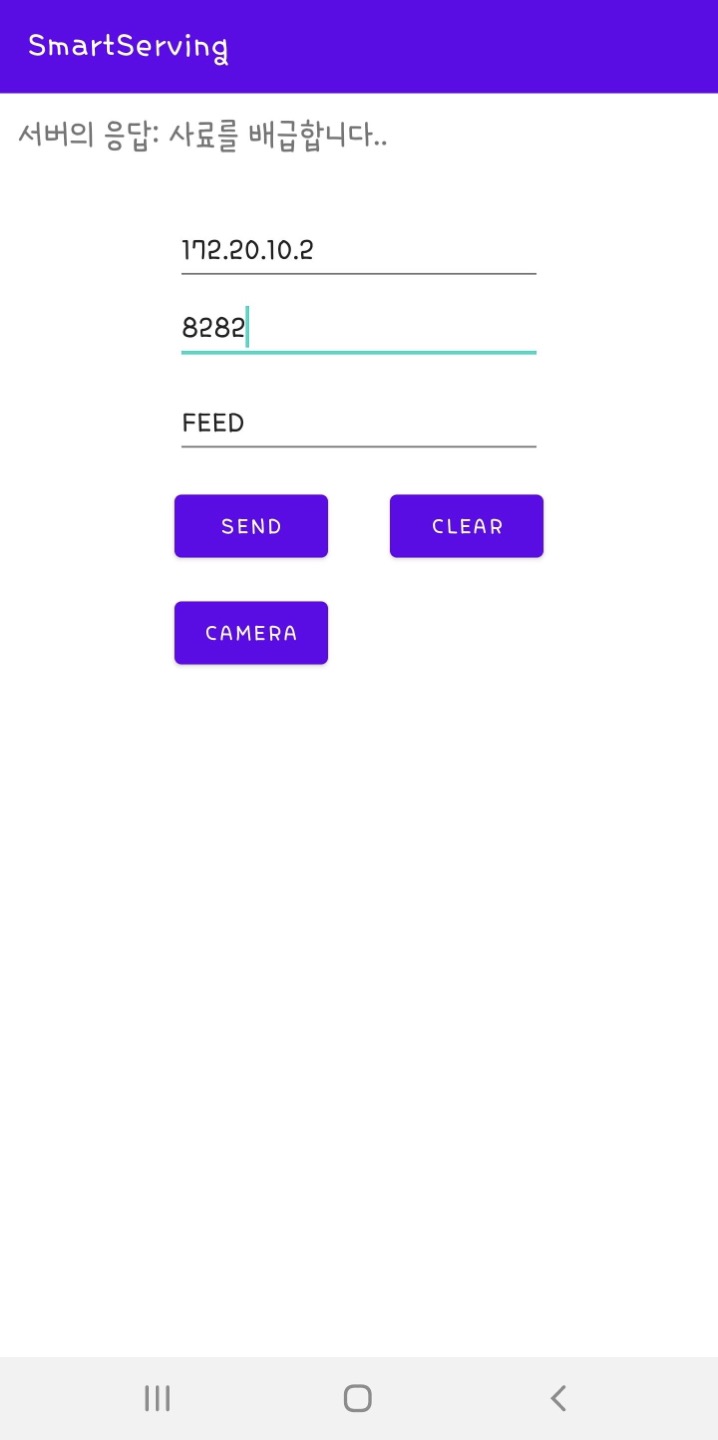
- 사료배급 기능

- CCTV 기능
- 사료배급 어플 화면



