- 首页
- 项目硬件简介与视频演示
- 项目软件与代码
- 小组分工
- 项目感想与反思
- 小组个人作业(待定)
-
首页放置照片1
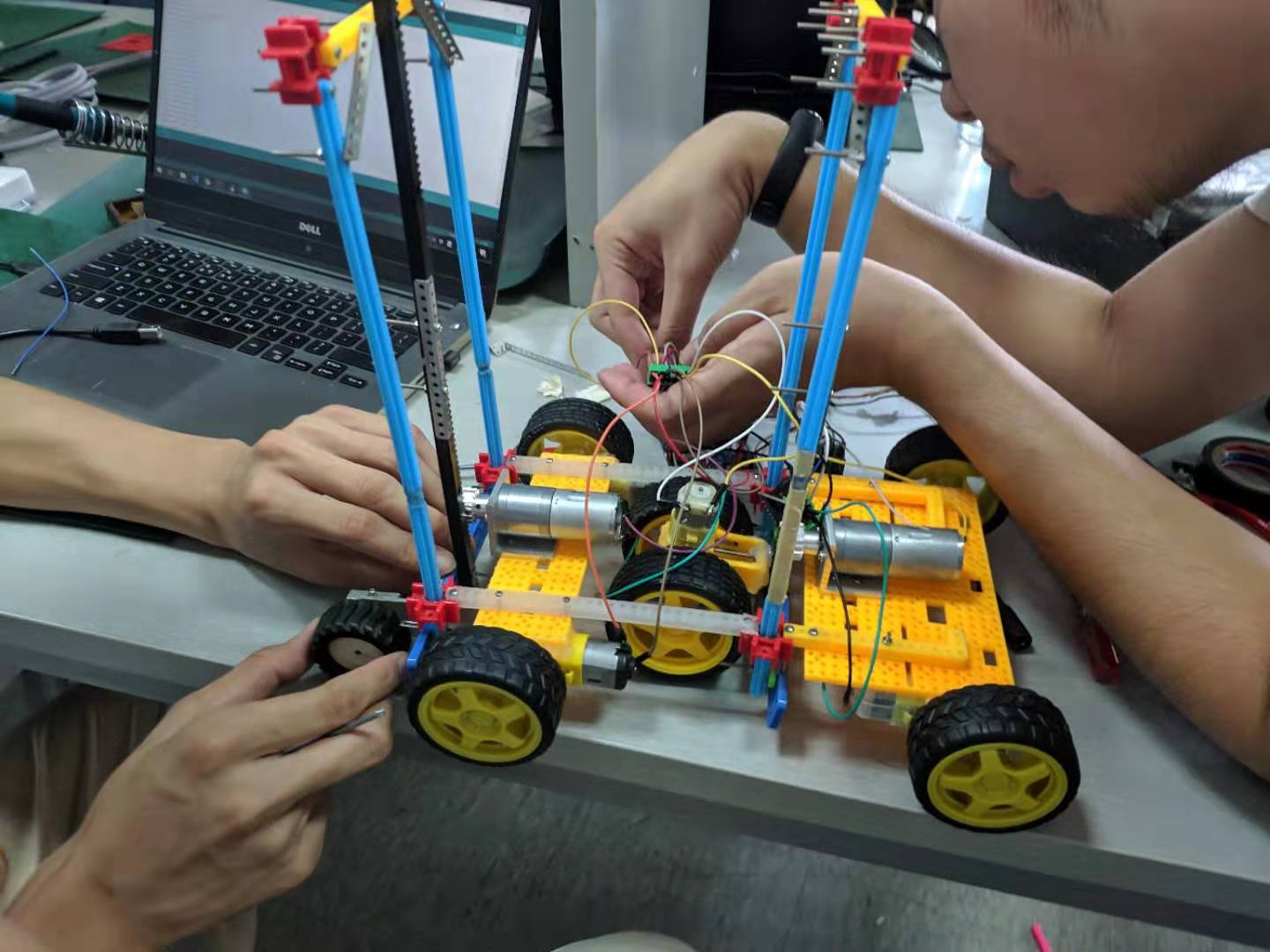
(待定或使用目前所给的),标题:基于安卓平台蓝牙控制的爬楼小车
-
项目简介页:

-
项目介绍:我们组的小车可以通过蓝牙与手机连接,并通过手机App控制小车的进退状况。小车利用升降的原理进行爬楼。小车共有四组轮子,其中三组为主动轮。
然后先放我们的演示视频。(暂时留出视频位置)
-
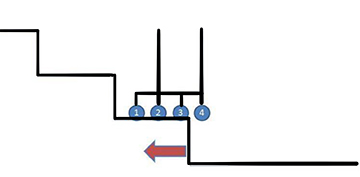
具体说明如下(2~8.jpg):
-
理想状态下一共有8个阶段,其中1号轮子和4号轮子都是带电机的主动轮,其他都是从动轮,而且升降装置装在2号和4号轮子上
-
阶段1 前进
-
-
阶段2
车体上升,1号和2号升降装置把1号和3号轮子升起来直到越过楼梯
-
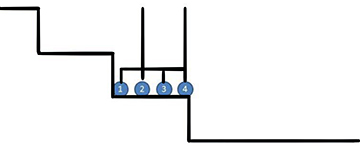
阶段3
1号和4号轮子推动小车前进
-
阶段4 :1号升降装置把2号轮子收回去




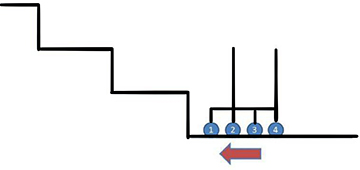
- 阶段5 1号和4号轮子推动小车前进

- 阶段6:主动轮停止转动,2号升降装置把4号轮子收回去

- 阶段7 1号轮子推动小车前进 也就是阶段1

- 阶段8 也就是阶段2,小车继续前进

硬件简介:
- arduino单片机:将多个不同功能的模拟电路、数字电路模块和微处理器集成在一个芯片上,以提供“单片机”解决方案。
- HC-06蓝牙模块:用于接收手机发出的操作信号。
- 减速电机
- 普通电机
- 塑料支架、齿条
- 软件:
- 手机端程序界面如图所示**(10.png)**,其中电机1、2控制小车平台的升降,其余控制小车的前进。

- 手机端程序使用app inventor开发,图形化编程界面如图(11.png):

-
手机源代码程序下载见下方。
-
单片机源代码:
#include <Arduino.h>
//1组轮子--4,5接口
//2组轮子--6,7接口
//3组轮子--8,9接口
//4--2,3
//升降电机1--10,11
//升降电机2--12,13
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}
void loop() {
// put your main code here, to run repeatedly:
if(Serial.available()>0){
int ch = Serial.read();
switch(ch){
case 101:allforward();break;//前进按压
case 102:stop();break;//前进松开
case 103:allbackword();break;//后退按压
case 104:stop();break;//前进松开
case 105:open_dianji1();break;//电机1开
case 117:fan_dianji1();break;
case 106:stop();break;//电机1关
case 107:open_dianji2();break;//电机2开
case 118:fan_dianji2();break;
case 108:stop();break;//电机2关
case 109:forward1();break;//1前进按压
case 110:stop();break;//1前进松开
case 111:forward2();break;//2前进按压
case 112:stop();break;//2前进松开
case 113:forward3();break;//3前进按压
case 114:stop();break;//3前进松开
case 115:forward4();break;//4前进按压
case 116:stop();break;//4前进松开
default:break;
}
}
}
void allforward(){ //全速前进
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
digitalWrite(6, HIGH);
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}
void allbackword(){ //全速后退
digitalWrite(2, LOW);
digitalWrite(3, HIGH);
digitalWrite(4, LOW);
digitalWrite(5, HIGH);
digitalWrite(6, LOW);
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}
void forward1(){ //1组前退
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, HIGH);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}
void forward4(){ //4组前退
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}
void forward2(){ //2组前进
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, HIGH);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}
void forward3(){ //3组前进
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}
void open_dianji1(){ //电机1爬升
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10,HIGH);
digitalWrite(11,LOW);
}
void fan_dianji1(){
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10,LOW);
digitalWrite(11,HIGH);
}
void open_dianji2(){ //电机2爬升
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(12,HIGH);
digitalWrite(13,LOW);
}
void fan_dianji2(){
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(12,LOW);
digitalWrite(13,HIGH);
}
void stop(){ //全停
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}这里请用markdown编辑嗷,美观一点
- 底部给出下载链接
- 安卓apk安装文件
- 单片机源代码txt
- 手机程序源代码aia
- 小组分工
-
组长:
- 柴子豪,电子信息与电气工程学院自动化专业,18级本科生。负责电路连接、程序设计、机械结构组装。
-
组员:

- 白振宇,电子信息与电气工程学院自动化专业,18级本科生。负责机械结构组装。

- 王子伦,电子信息与电气工程学院信息安全专业,18级本科生。负责机械结构组装。
- 桑锐,电子信息与电气工程学院信息工程专业,18级本科生。负责网页设计、机械结构组装。




- 项目感想:
- 这次制作安卓爬楼小车的过程中,尽管我们设计小车的计划较为周密,但是过程也历经坎坷,最终的小车成品也不尽如人意。小车的不足之处主要表现在:
- 整体结构臃肿,所占体积大;
- 爬楼效率低下,且无法攀爬日常所见的楼梯;
- 走线暴露,未进行封装,故障概率大。
- 以上这些问题的原因有:
- 所给材料限制,整体刚度低而较为脆弱,易折断损坏;
- 材料非标准件,材料之间匹配难度大;
- 对于电路部分的设计考虑不完备。
- 相信在这次的项目设计与制作中,每一位组员都收获满满,吸取了相关经验。
附上16~19.jpg




