This project builds upon the Turtlebot3 ROS packages and allows you to generically spawn new Turtlebot instances to a Gazebo simulation environment and to manage their movement either by setting a desired goal position using the autonomous navigation mode or by using the keyboard to control the robot using the teleoperation mode.
This is accomplished by a set of existing nodes, in particular these include the nodes of the ROS navigation stack wrapped by custom launch files and appropriate namespacing, combined with two custom nodes manager.cpp and turtlebot_behaviour.cpp. The latter is wrapped by a corresponding launch file and appropriate namespace as well.
The main functionality is given by two cpp files:
manager.cpp: Manager class responsible for processing the user input to spawn new instances of the Turtlebot class. The Turtlebot class is responsible for reading the URDF from file, spawning the URDF to Gazebo and for launching theturtlebot_behaviournode as well as its dependencies.turtlebot_behaviour.cpp: Turtlebot Behaviour class responsible for processing the user input to select and execute autonomous navigation or teleoperation mode.
- The project demonstrates an understanding of C++ functions and control structures: various functions and control structures are used throughout the above two
.cppfiles - The project reads data from a file and process the data, or the program writes data to a file:
manager.cppreads the robot description from file in line 40 - The project accepts user input and processes the input:
manager.cppandturtlebot_behaviour.cppprocess user input in line 112 (manager.cpp) and line 278 (turtlebot_behaviour.cpp) - Object Oriented Programming: both
manager.cppandturtlebot_behaviour.cppare structured as OOP code and therefore use a variety of corresponding features.
Prerequisites:
- Ubuntu 18.04
http://wiki.ros.org/melodic/Installation/Ubuntu
$ sudo apt install ros-melodic-map-server
$ sudo apt install ros-melodic-amcl
$ sudo apt install ros-melodic-move-base
$ sudo apt install ros-melodic-dwa-local-planner
$ mkdir -p ~/catkin_ws/src
$ cd catkin_ws
$ catkin_make
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
$ echo "export TURTLEBOT3_MODEL=waffle" >> ~/.bashrc
$ source ~/.bashrc
If you want to run the Gazebo simulation on a VMware virtual machine, the following variable needs to be set as well:
$ echo "export SVGA_VGPU10=0" >> ~/.bashrc
$ cd src
$ git clone https://github.com/verena-roehrl/CppND-Capstone-Turtlebot3.git
$ cd CppND-Capstone-Turtlebot3
$ git submodule init
$ git submodule update
$ cd turtlebot3
$ git checkout master
$ git pull
$ cd ..
$ cd turtlebot3_msgs
$ git checkout master
$ git pull
$ cd ..
$ cd turtlebot_simulations
$ git checkout master
$ git pull
$ cd ~/catkin_ws/
$ catkin_make
In a new terminal execute the command:
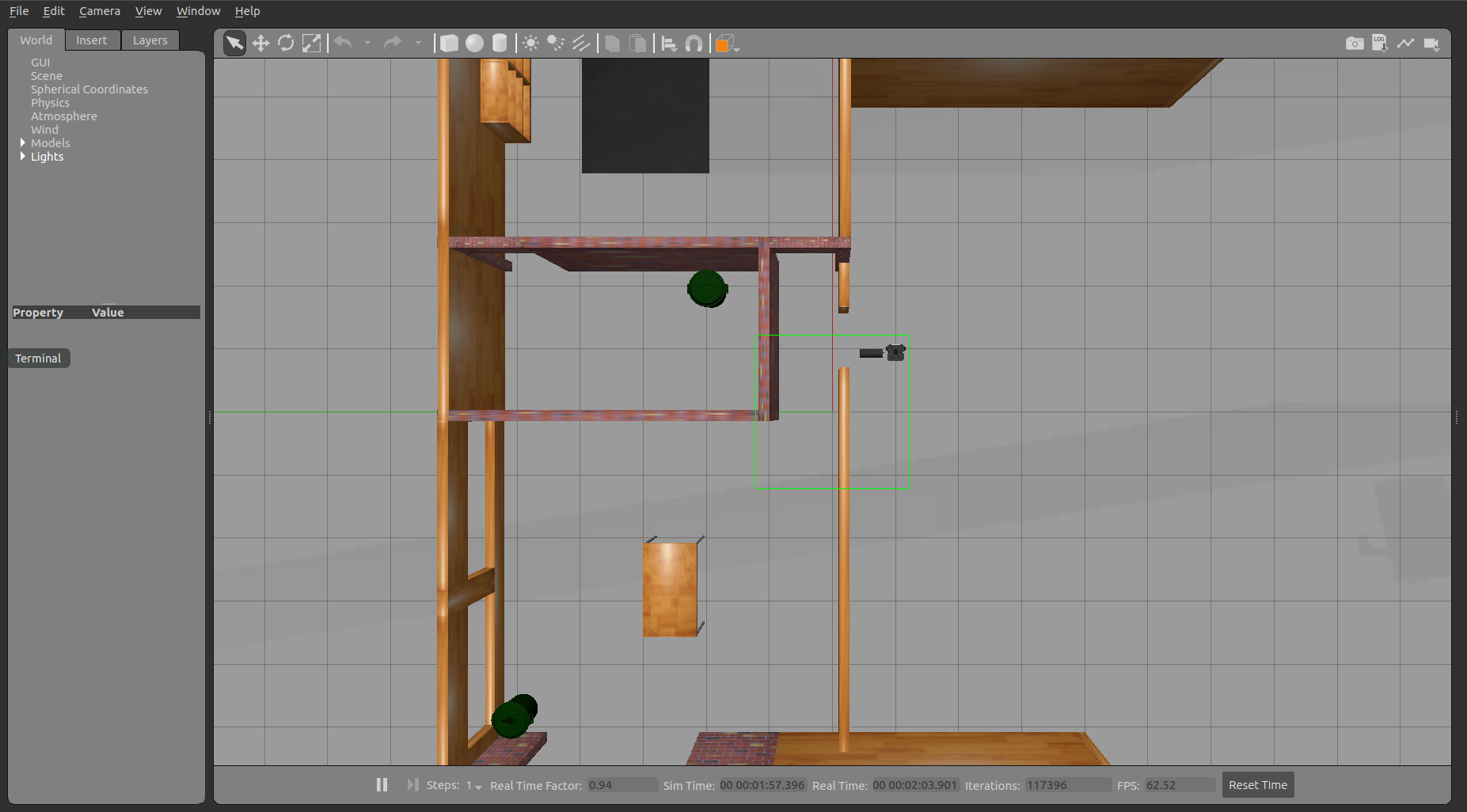
$ roslaunch turtlebot3_gazebo_custom multi_turtlebot3_empty.launch
This launches the Gazebo environment and you should see the following:

In a new terminal execute the command:
$ rosrun turtlebot3_movement_manager manager
This is the starting point for spawning and moving new Turtlebots.
The terminal output guides you through the procedure by requesting some necessary data.
The following picture provides a possible example of user input:
 This command has multiple effects:
This command has multiple effects:
- It spawns a new Turtlebot model "leo" to the Gazebo environment:
- It opens a new terminal and inside it launches the dependencies of the robot's navigation capabilities packed into the launch file
multi_turtlebot3_navigation_namespace.launch This terminal only helped for debugging and can safely be ignored.
This terminal only helped for debugging and can safely be ignored. - It opens a new terminal and inside it launches the custom ROS node
turtlebot_behaviour.cppThis terminal guides the user through the process of moving the newly spawned Turtlebot. The following picture provides a possible example of user input: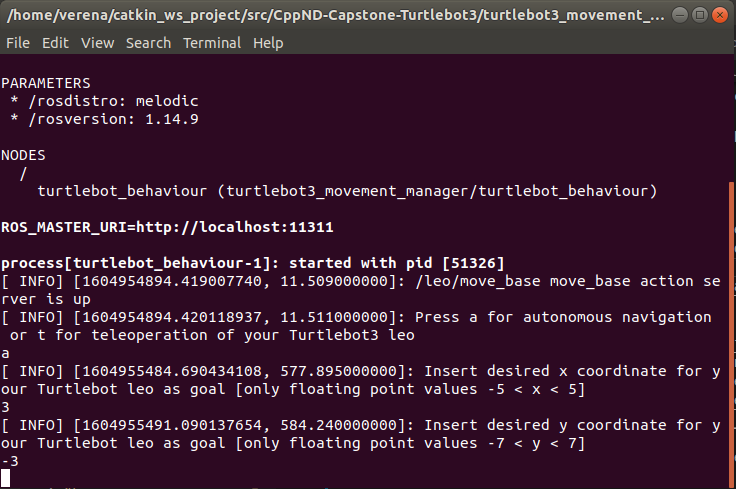 In Gazebo you will see the robot autonomously moving to the specified goal.
After reaching the goal, the user can again decide to either specify another goal to be reached autonomously or to use the teleoperation mode.
The following picture provides a possible example of user input:
In Gazebo you will see the robot autonomously moving to the specified goal.
After reaching the goal, the user can again decide to either specify another goal to be reached autonomously or to use the teleoperation mode.
The following picture provides a possible example of user input:
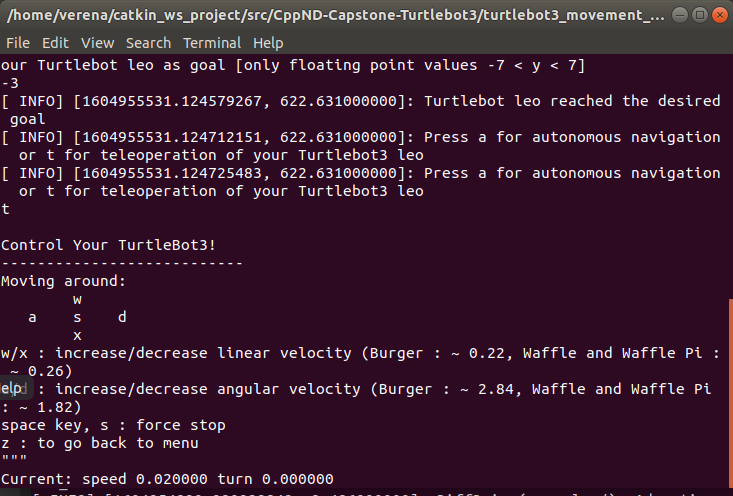 Now you can control the Turtlebot using the keys
Now you can control the Turtlebot using the keys a,d,w,x. Pressing the keysstops the robot and by hittingzyou can get back to the menu to select either the autonomous navigation or the teleoperation mode.




You can also spawn multiple Turtlebots by going back to the Manager terminal and following the procedure again to create and control a new Turtlebot (with a different name, as names have to be unique for a proper access).