The goal of this project is to have a REAL humanoid robot imitate the movements of a human.
Here is a demonstration of the SimplePYBotSDK in action, utilized to command our robot, named Uranus. To implement this, I incorporated MediaPipe, employing its human pose estimator to provide real-time output of 33 body landmarks for each frame in a video. From these 33 landmarks, I extract the angles of the moving joints. Subsequently, my custom library calculates the servo motor angles required for the new pose and transmits them to the robot through a socket connection.
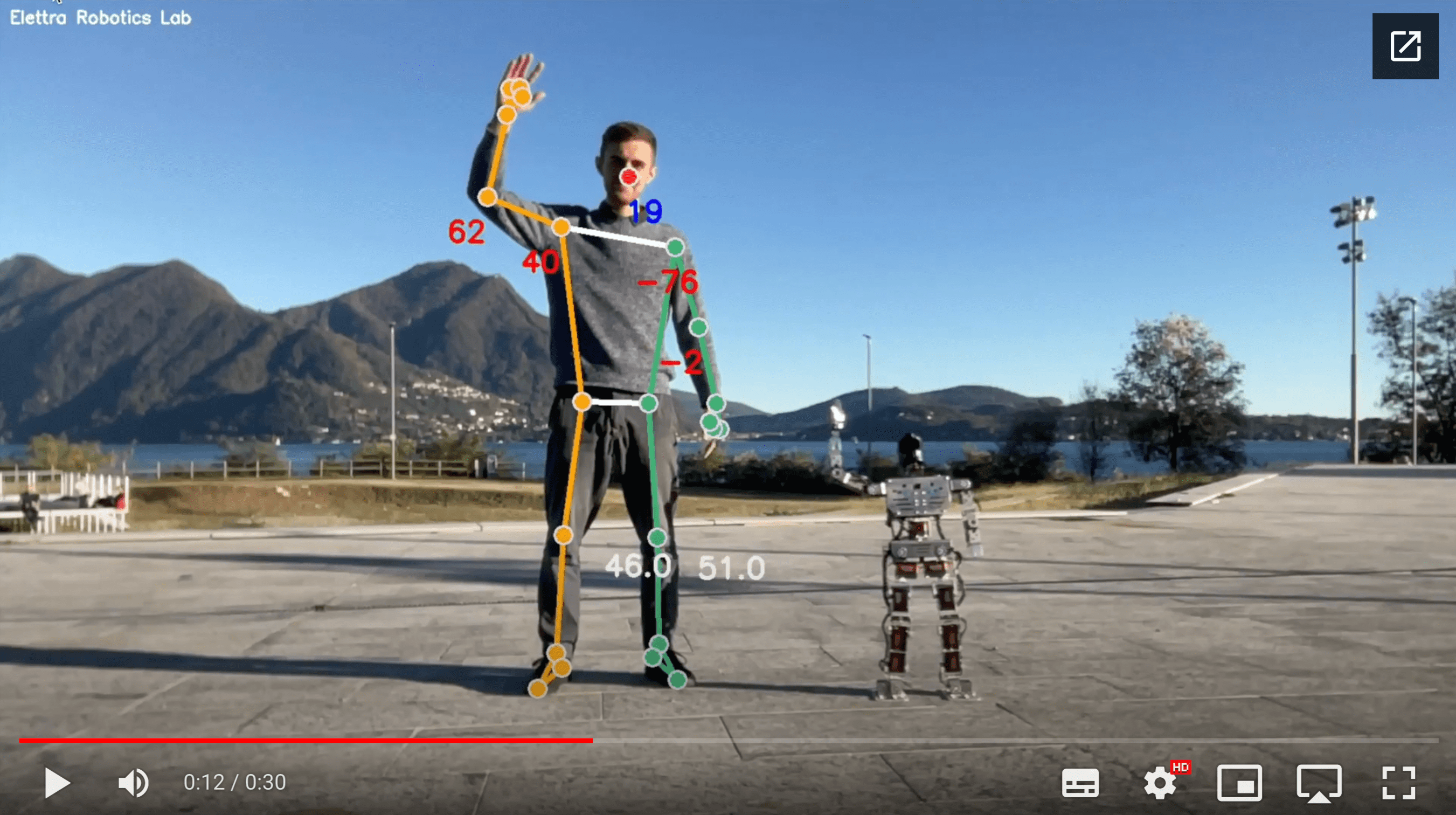
The example below shows a test robot following me in real
time, controlled by my computer with MediaPipe.

This program use MediaPipe to detect the body pose.
MediaPipe Pose is a ML solution for high-fidelity body pose,
inferring 33 2D landmarks on the whole body.
The detector that MediaPipe uses is inspired by BlazeFace.

The code contains a Humandroid class, which takes care of all image processing operations, using MediaPipe. The Humandroid class contains various methods that perform operations/calculations on the image. The results are always accessible from the main program and can be exported, in JSON format, to communicate with other systems and control a humanoid robot.
In the example above red labels represent the angles that servomotors of a humanoid robot must assume.
JSON data representation example: (only 1 landmark)
{
"pose_landmarks": [
{
"id": 13,
"name": "PoseLandmark.LEFT_ELBOW",
"x": 0.7578693628311157,
"y": 1.1605275869369507,
"z": -0.3892576992511749,
"visibility": 0.8600940108299255,
"angle": 52,
"z_angle": 5
}
]
}
The core of this project is SimplePYBotSDK, a simple Python3 library to manage the states of servomotors and sensor in a robot, in a very simple way. I've built this library to handle the status of robot’s motors.
Every robot design is defined in a JSON file, in which all robot specifications are set. In these files we can find: robot basic information, servomotors list (with angle limits, offset, orientation), sensors, motors type, and standard poses for the robot. The core of SimplePYBotSDK allows you to move servomotor (changing the state) or group of servomotors simply with a method invocation. The core handles the movements with the right speed (defined in the file configuration).
The library was built to be completely independent from the robot hardware and extremely simple to use. Direct control of the motors can be managed externally to the library and can be different for each robot.
To enable a low latency real time communication an external layer has been added to the library, to allow socket management. This can be used in robot cooperation or to debug our robots in real time.
Sockets can also be used to integrate the robot with externals programs in a simple way. We used this to tests our programs in a simulated environment, using Webots.
In my case the computer is sending all the data to a Raspberry Pi zero W using a socket.

python3 -m venv env
source env/bin/activate # On Linux
env\Scripts\activate # On Windows
If you have problems with the installation of the requirements, try installing the last version of mediapipe. For Apple Silicon there is a precompiled version of mediapipe called "mediapipe-silicon".
pip install -r requirements.txt
https://www.elettraroboticslab.it
python3 mediapipe_example.py # To checks if MediaPipe and camera are working
python3 main.py # To see all your poses angle
python3 simplepybotsdk.py # If you have a robot with SimplePYBotSDK and you want to remote control with socketsI've made some changes to the MediaPipe library to make it work better.
# In file venv/lib/python3.9/site-packages/mediapipe/python/solutions/drawing_utils.py -> method draw_landmarks
# Added condition to hide the landmarks in some cases
if drawing_spec.circle_radius > 0 and drawing_spec.thickness > 0:
# In the same method I've chenged the radius of the circles
int(drawing_spec.circle_radius * 1.8), # Changed to 1.8