Este proyecto pretende diseñar y fabricar un cuadrúpedo autónomo. La primera etapa corresponde a seleccionar y diseñar el hardware adecuado para montar una estructura funcional. Las siguientes etapas se centrarán en el control de la caminata y planificación/navegación del entorno.
- PCB design
- Basic motor control
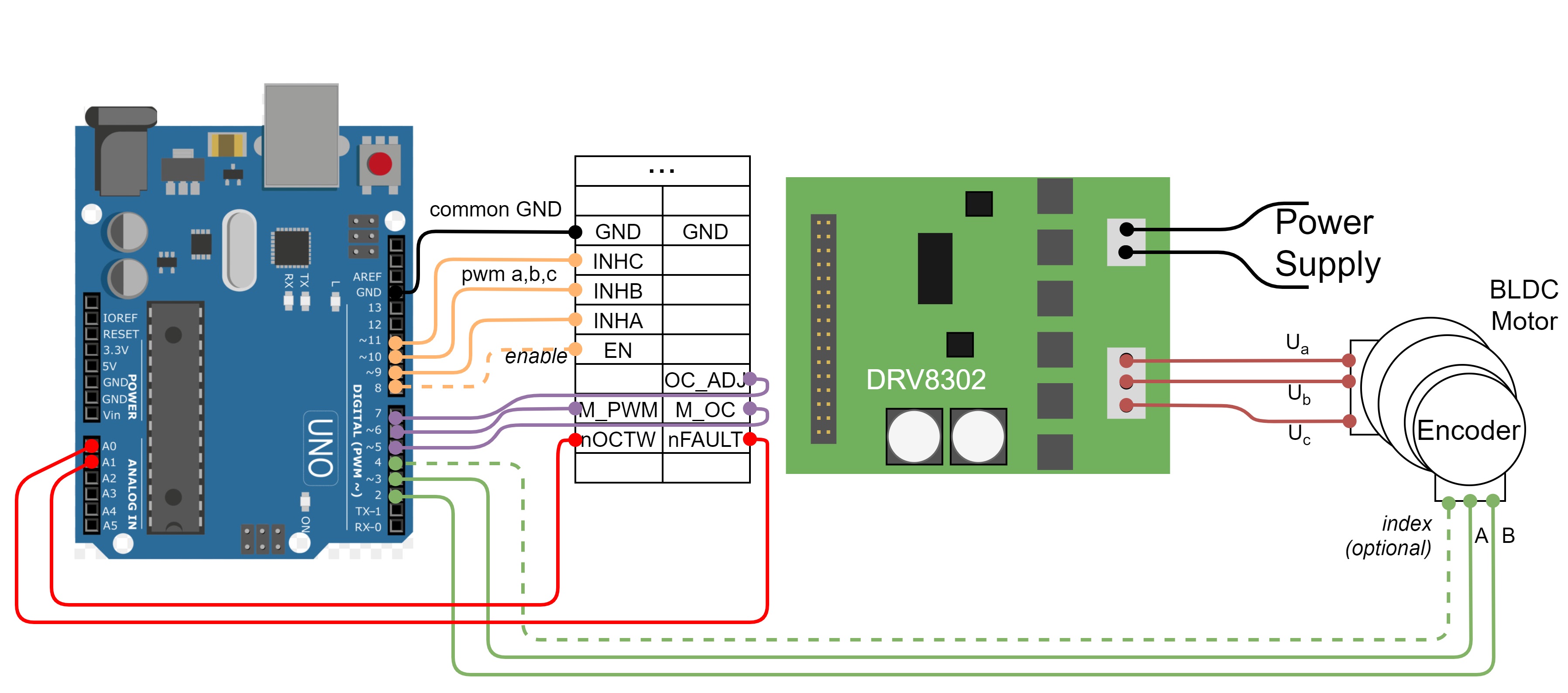
En esta versión se propone utilizar el driver texas drv8302 junto a la librería SimpleFOC