A C library for linear algebraic optimization problems.
This is a small, fast library focused on solving the following linear problems:
- L2-minimization, aka least squares,
- L1-minimization,
- L∞-minimization, and
- general linear programming problems.
These problems and the algorithms used are described in more detail below.
Given input matrix A and column vector b, find column vector x so that:
- Ax=b, and
- ||x||2 is minimized.
You can solve this in calgebra by using the
alg__l2_min function; a usage example is given below.
The algorithm used by calgebra is essentially to project any
feasible solution onto the row span of A. Some texts use
the term
least squares
to indicate a slightly different
problem, where b may not be in the column span of A, so that
the value minimized is ||Ax-b||2. This is
an equivalent problem that can also be solved with
alg__l2_min by using input matrix C and column matrix d chosen
so that {x: Cx=d} = {Ax-b: x is free}.
Internally, calgebra uses a modified Gram-Schmidt
QR decomposition
to perform the projection onto the row span of A.
This is the same as L2-minimization, except that we minimize ||x||1 instead of ||x||2.
Specifically, given input matrix A and column vector b, find column vector x so that:
- Ax=b, and
- ||x||1 is minimized.
You can solve this in calgebra by using the
alg__l1_min function; a usage example is given below.
Internally, this problem is reduced to a general linear program, described below.
Given input matrix A and column vector b, find column vector x so that:
- Ax=b, and
- ||x||∞ is minimized.
As a reminder, for the vector x = (x1, x2, .., xn), the value of ||x||∞ is simply the maximum |xi| over all i; that is, it's the maximum absolute value of all the coordinates of x.
You can solve this in calgebra by using the
alg__linf_min function; a usage example is given below.
Similar to the L1 case, this problem is internally reduced to a general linear program, described next.
Given input matrix A and column vectors b and c, find column vector x so that:
- Ax=b,
- x≥0, and
- cTx is minimized.
The algorithm used by calgebra is
the simplex method,
along with Bland's rule to avoid cycling. Although this algorithm
is not guaranteed to complete in polynomial time, it is widely
believed to be the fastest for most practical applications.
In the example below, we call several key functions:
alg__alloc_matrix(nrows, ncols)allocates and returns a new matrix.alg__l{1,2}_min(A, b, x)solves an L{1,2}-minimization problem.alg__free_matrix(M)frees matrixM.
A matrix is stored as type alg__Mat, which is a typedef
for alg__MatStruct *, defined transparently in the header.
Matrices are stored in row-major order, meaning that
entries in a single row are stored contiguously in memory.
Use alg__elt(M, i, j) to access the element of matrix M
in row i and column j; this is aware of the transposed
state of M (that is, the value of M->is_transposed is
taken into consideration).
// This problem has the feasible solution set
// (1 1 0) + t(-1 -1 8), where t is free, specified with
// A = (4 4 1) b = (8)
// (8 0 1) (8)
// For this set, x = (1 1 0)^T minimizes ||x||_1.
alg__Mat A = alg__alloc_matrix(2, 3);
alg__set_matrix(A, 4, 4, 1,
8, 0, 1 );
alg__Mat b = alg__alloc_matrix(2, 1);
alg__set_matrix(b, 8, 8);
alg__Mat x = alg__alloc_matrix(3, 1);
alg__Status status;
status = alg__l1_min(A, b, x);
if (status == alg__status_ok) {
// Now x is the solution of the L1-min problem.
}
status = alg__l2_min(A, b, x);
if (status == alg__status_ok) {
// Now x is the solution of the L2-min problem.
}
alg__free_matrix(x);
alg__free_matrix(b);
alg__free_matrix(A);
The L∞ case can be handled with the same code,
using alg__linf_min in place of alg__l1_min or alg__l2_min.
This section illustrates use of the alg__run_lp function
to solve a linear program.
Our goal is to find the point (x, y) in the following triangle which minimizes the value 3x + 2y.
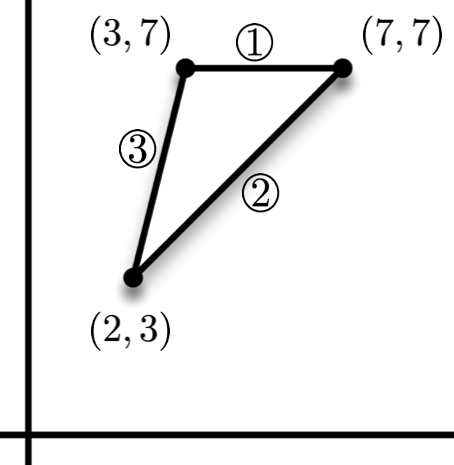
The sides of the triangle have been marked so we can find linear inequalities for each one. A point is in the triangle - boundaries included - if and only if all of the inequalities below are true. To capture this as a standardized linear programming problem, we introduce the slack variables s1, s2, and s3, so that each inequality in x and y alone becomes an equality when paired with a slack variable. The same set of (x, y) points are under consideration, keeping in mind that the slack variables - like all variables in a standard linear programming problem - are constrained to be nonnegative:
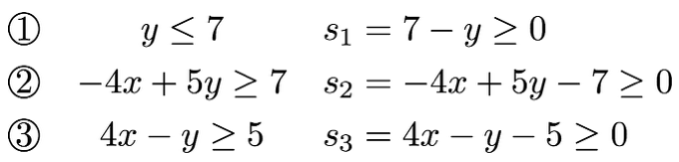
We can find the matrices A and b based on the right-hand equalities above. The value of c comes from the coefficients 3 and 2 in the value being minimized, 3x + 2y; since the slack variables are not being minimized, their coefficients in c are all zero.
Here is the code to solve this linear programming problem using lin__run_lp:
alg__Mat A = alg__alloc_matrix(3, 5);
alg__set_matrix(A, 1, 0, 0, 0, 1,
0, 1, 0, 4, -5,
0, 0, 1, -4, 1 );
alg__Mat b = alg__alloc_matrix(3, 1);
alg__set_matrix(b, 7, -7, -5);
alg__Mat c = alg__alloc_matrix(5, 1);
alg__set_matrix(c, 0, 0, 0, 3, 2);
alg__Mat x = alg__alloc_matrix(5, 1);
alg__Status status = alg__run_lp(A, b, x, c);
if (status == alg__status_ok) {
// Now x is the solution of the linear program.
}
alg__free_matrix(x);
alg__free_matrix(c);
alg__free_matrix(b);
alg__free_matrix(A);
The following status values are possible:
| status value | meaning |
|---|---|
alg__status_ok |
It's all good. |
alg__status_no_soln |
Ax=b has no solutions. |
alg__status_unbdd_soln |
The value of cTx can be made arbitrarily low. |
alg__status_input_error |
The input matrix dimensions are not as expected, or an input was unexpectedly NULL. |
alg__status_lin_dep |
(Only from alg__QR) The input had linearly dependent columns; the output is still valid. |