This repository is the official implementation of paper YOLOv9-FishEye: Improving method for fisheye camera object detection
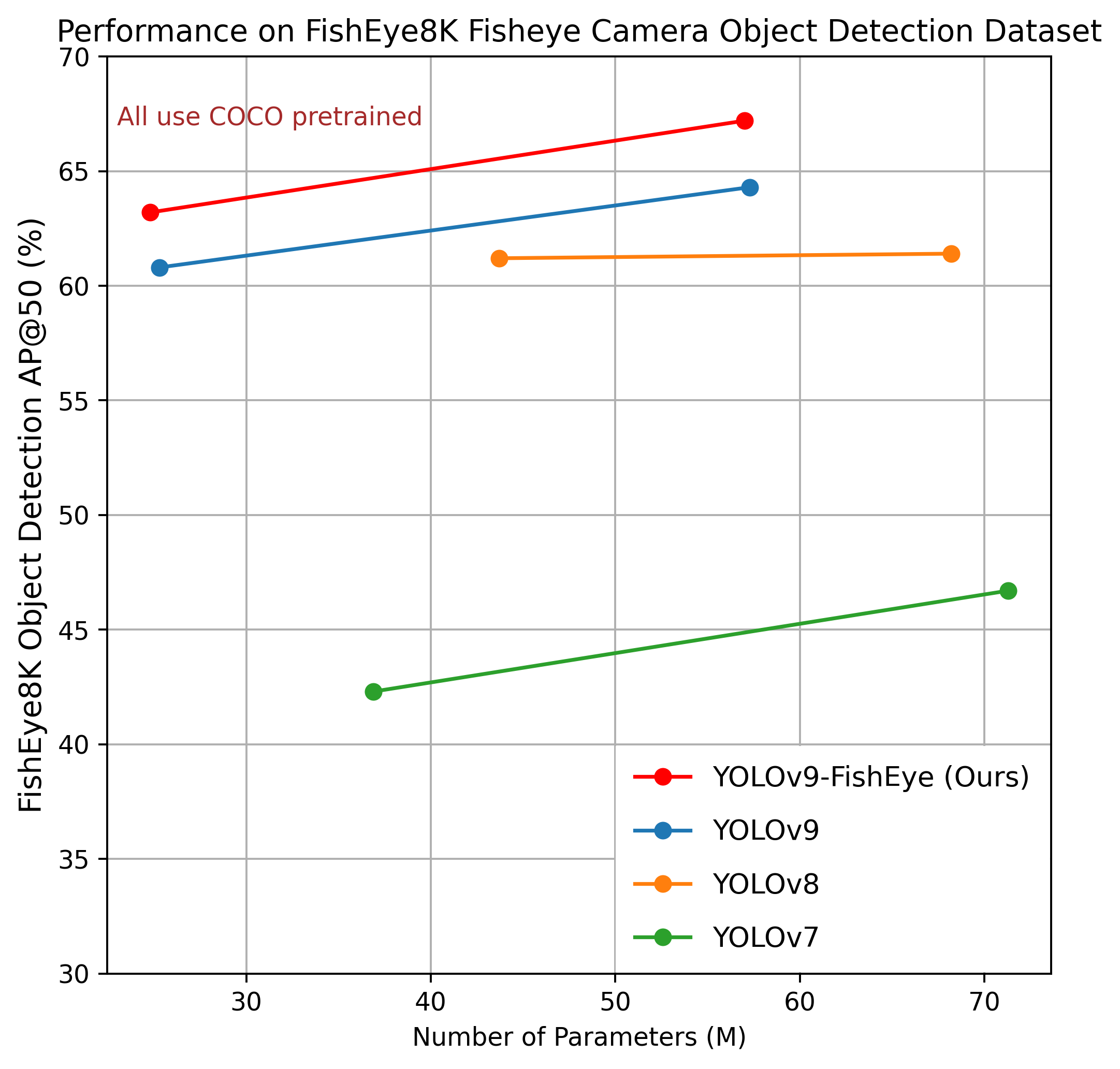
Results on FishEye8K dataset.
| Model | Test Size | AP50test | mAPtest | F1-score | Param. | FLOPs |
|---|---|---|---|---|---|---|
| Our-E | 640 | 67.2% | 46.4% | 59.8% | 57.0M | 186.3G |
| Our-C | 640 | 63.2% | 42.9% | 55.1% | 24.7M | 101.4G |
| YOLOv9-E | 640 | 64.3% | 44.1% | 56.7% | 57.3M | 189.0G |
| YOLOv9-C | 640 | 60.8% | 41.2% | 53.7% | 25.3M | 102.1G |
| YOLOv8x | 640 | 61.4% | 40.29% | 51.0% | 68.2M | 257.8G |
| YOLOv7-X | 640 | 46.74% | 29.19% | 57.9% | 71.3M | 189.9G |
| YOLOR-W6 | 1280 | 64.6% | 44.2% | 58.9% | 79.8M | 454.0G |
| YOLOR-P6 | 1280 | 66.32% | 44.0% | 61.1% | 37.2M | 326.2G |
| YOLOv7-E6E | 1280 | 50.8% | 32.6% | 62.9% | 151.7M | 843.2G |
Our work is a modified version most inspired from YOLOv9. The target of this modify is tailed for fisheye camera object detection task and also object detection for image from 360 degree camera.
- Our modify model architecture
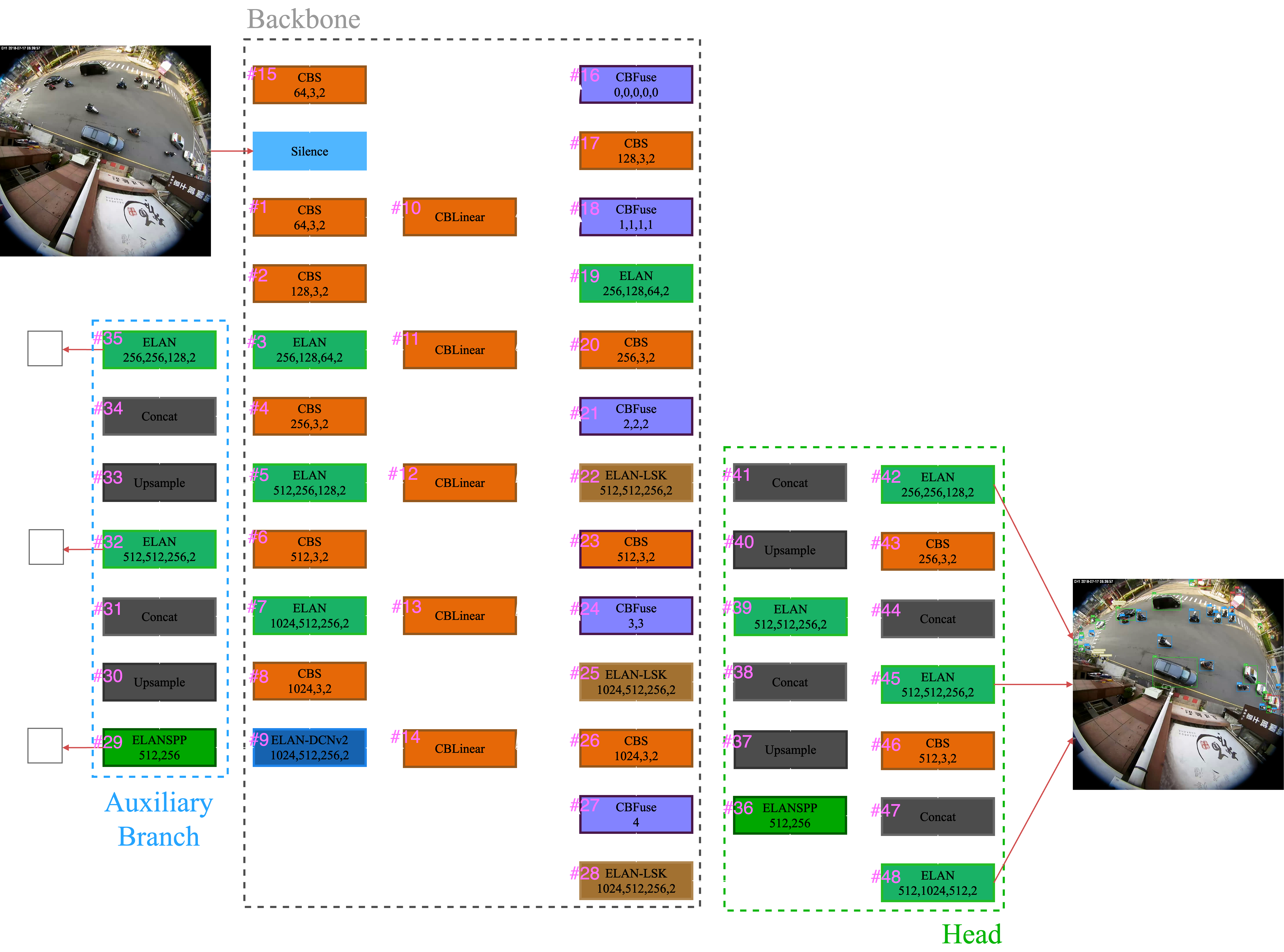
We replace RepNBottleNeck network in ELAN byRepNLSKBottleNeck by RepNDCNv2BottleNeck and RepNLSKBottleNeck network to get ELAN-DCNv2, ELAN-LSK respectively.
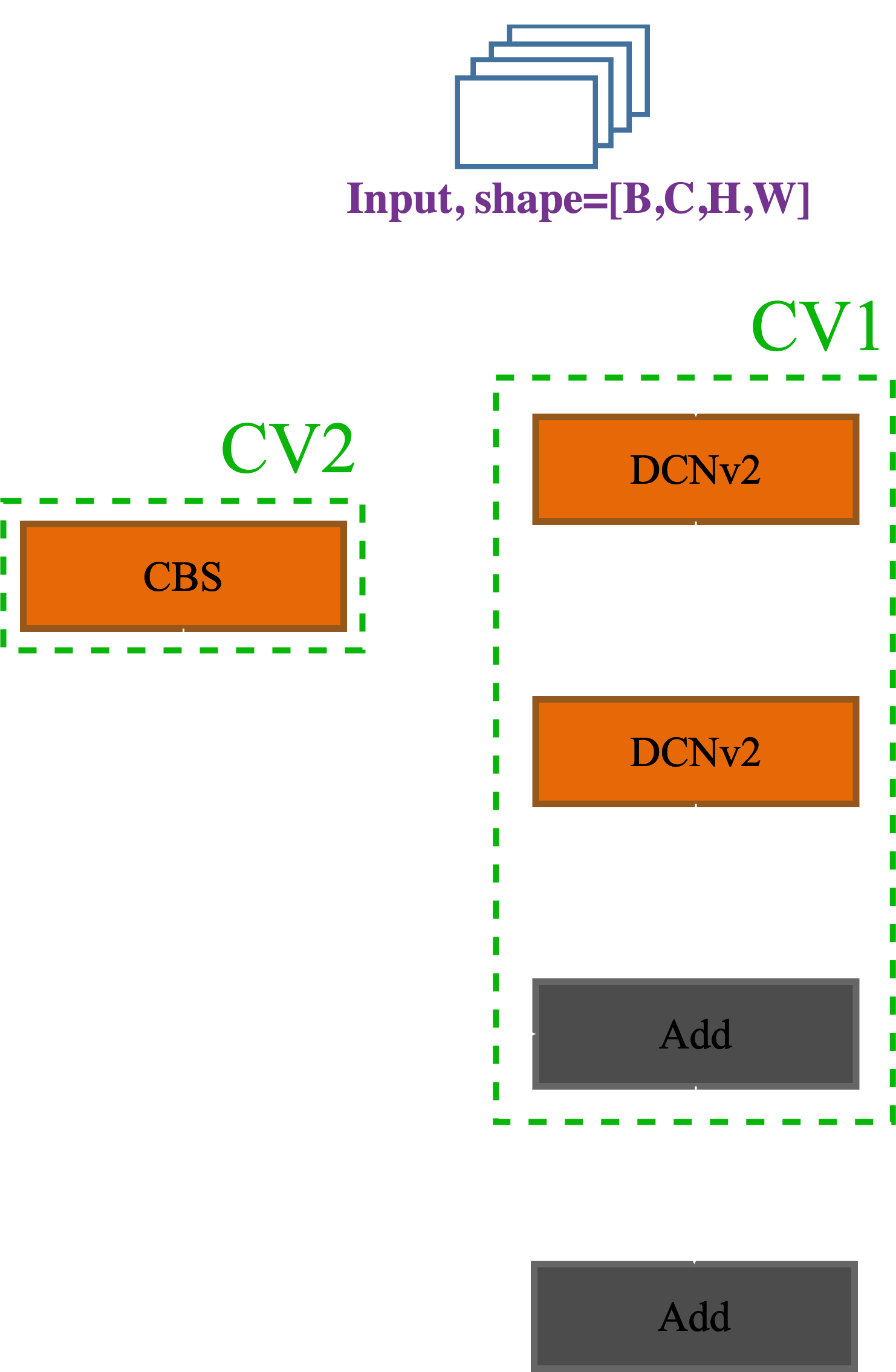
- Our RepNDCNv2BottleNeck network architecture
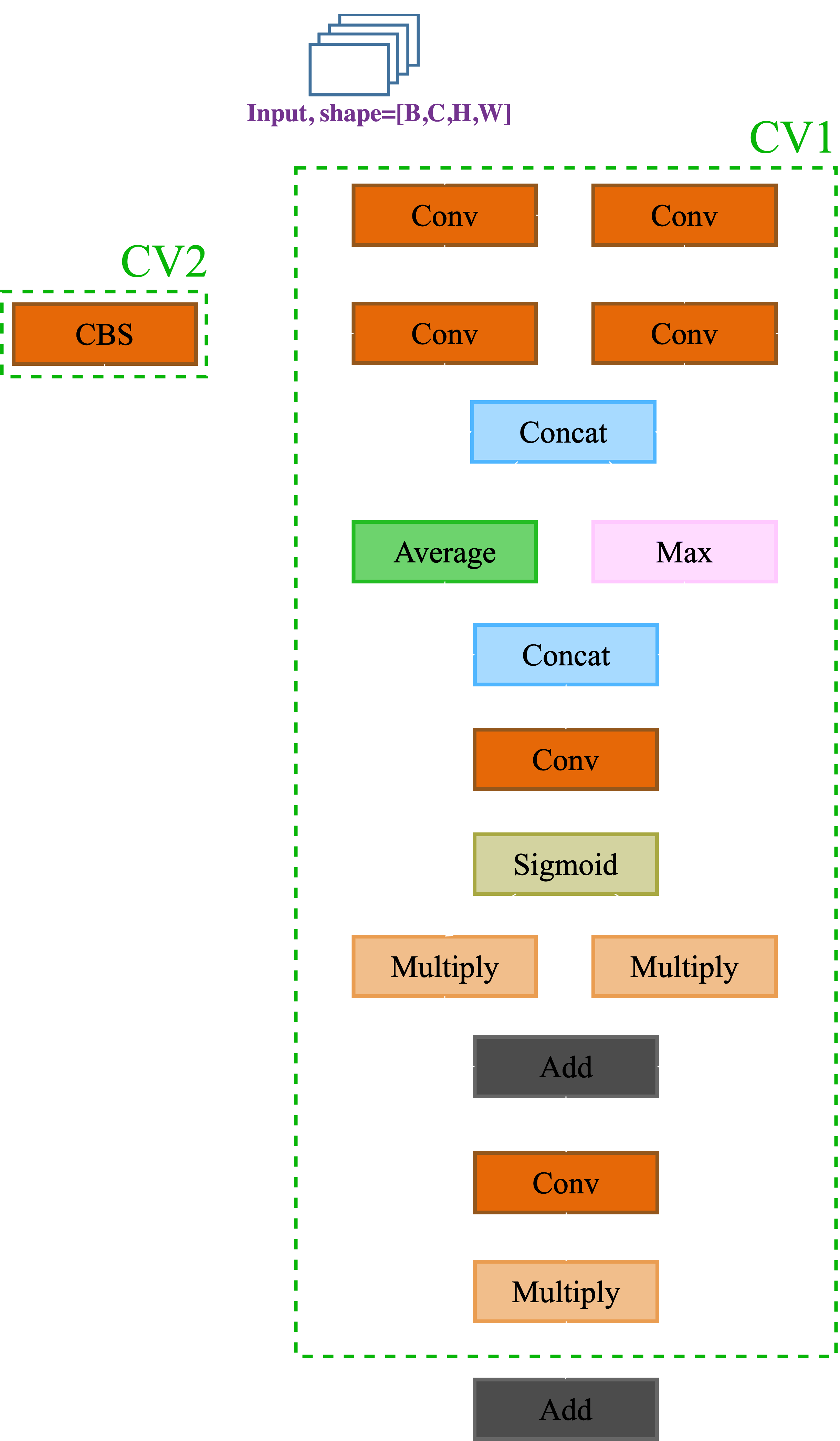
- Our RepNLSKBottleNeck network architecture
Public after our paper be realeased.
# Download this repository to local
git clone https://github.com/tuansunday05/fe8kv9
# Install required packages
pip install -r requirements.txt
# Go to code folder
cd /fe8kf9Extra large version: yolov9-e-modify-converted.pt yolov9-e-modify-trained.pt
Compact version: yolov9-c-modify-converted.pt yolov9-c-modify-trained.pt
# evaluate our yolov9 modify converted models
python val.py --data data/fe8kyolo/data.yaml --img 640 --batch 8 --conf 0.5 --iou 0.5 --device 0 --weights './yolov9-e-modify-converted.pt' --task 'test' --save-json --name yolov9_e_our_640_val
# evaluate our yolov9 modify models
python val_dual.py --data data/fe8kyolo/data.yaml --img 640 --batch 8 --conf 0.5 --iou 0.5 --device 0 --weights './yolov9-e-modify-trained.pt' --task 'test' --save-json --name yolov9_e_our_640_val
# evaluate converted yolov9 models
python val.py --data data/fe8kyolo/data.yaml --img 640 --batch 8 --conf 0.5 --iou 0.5 --device 0 --weights './yolov9-e-converted.pt' --task 'test' --save-json --name yolov9_e_640_val
# evaluate yolov9 models
python val_dual.py --data data/fe8kyolo/data.yaml --img 640 --batch 8 --conf 0.5 --iou 0.5 --device 0 --weights './yolov9-e-trained.pt' --task 'test' --save-json --name yolov9_e_640_valData & model preparation
- Download FishEye8K dataset images include train & test set.
- Split train and validation set by using split_data.py
- Create data.yaml in folder like this
names:
- Bus
- Bike
- Car
- Pedestrian
- Truck
nc: 5
test: /FE8K/test/images
train: /FE8K/train/images
val: /FE8K/val/images
- Download pre-trained model yolov9-e.pt, yolov9-c.pt.
GPU Training
# train our yolov9-e modify models
python train_dual_custom.py --workers 8 --device 0 --batch 16 --data data/fe8kyolo/data.yaml --img 640 --cfg models/detect/accumulate/yolov9-e-dcn9-lsk-elan4.yaml --weights './yolov9-e.pt' --name yolov9-e-dcn9-lsk-elan4 --hyp hyp.scratch-high.yaml --min-items 0 --epochs 500 --close-mosaic 0
# train our yolov9-c modify models (still in development)
python train_dual_custom.py --workers 8 --device 0 --batch 16 --data data/fe8kyolo/data.yaml --img 640 --cfg models/detect/accumulate/yolov9-c-dcn-lsk-elan4.yaml --weights './yolov9-e.pt' --name yolov9-c-dcn-lsk-elan4 --hyp hyp.scratch-high.yaml --min-items 0 --epochs 500 --close-mosaic 0Because of using auxiliary for more gradient information in early stage, trained YOLOv9 model need to be converted after training to remove auxiliary branch for simple inference and light-weights. After converting the model, the model architecture of YOLOv9 is actually Gelan with respective version.
# convert our yolov9-e modify models
python reparameterization.py --cfg './models/detect/gelan-e-our.yaml' --model 'e' --weights './yolov9-e-modify-trained.pt' --classes_num 5 --save './yolov9-e-modify-converted.pt'
# convert our yolov9-c modify models
python reparameterization.py --cfg './models/detect/gelan-c-our.yaml' --model 'e' --weights './yolov9-c-modify-trained.pt' --classes_num 5 --save './yolov9-c-modify-converted.pt'
# inference our yolov9 modify converted models
python detect.py --source './figure/example.jpg' --img 640 --device 0 --weights './yolov9-e-modify-converted.pt' --name yolov9_e_modify_640_detect
# inference our yolov9 modify trained models
python detect_dual.py --source './figure/example.jpg' --img 640 --device 0 --weights './yolov9-e-modify-trained.pt' --name yolov9_e_modify_640_detectWe also integrated tracking algorithm (StrongSORT) and made a comparison with Yolov9-e model for more intuitive visuallization. Original video demo taking from R0 Fish Len Dataset Center Point.
example_30fps.mp4
Expand
- https://github.com/MoyoG/FishEye8K
- https://github.com/WongKinYiu/yolov9
- https://github.com/open-mmlab/mmdetection
- https://github.com/zcablii/LSKNet
- https://github.com/AlexeyAB/darknet
- https://github.com/WongKinYiu/yolor
- https://github.com/WongKinYiu/yolov7
- https://github.com/VDIGPKU/DynamicDet
- https://github.com/DingXiaoH/RepVGG
- https://github.com/ultralytics/yolov5
- https://github.com/meituan/YOLOv6