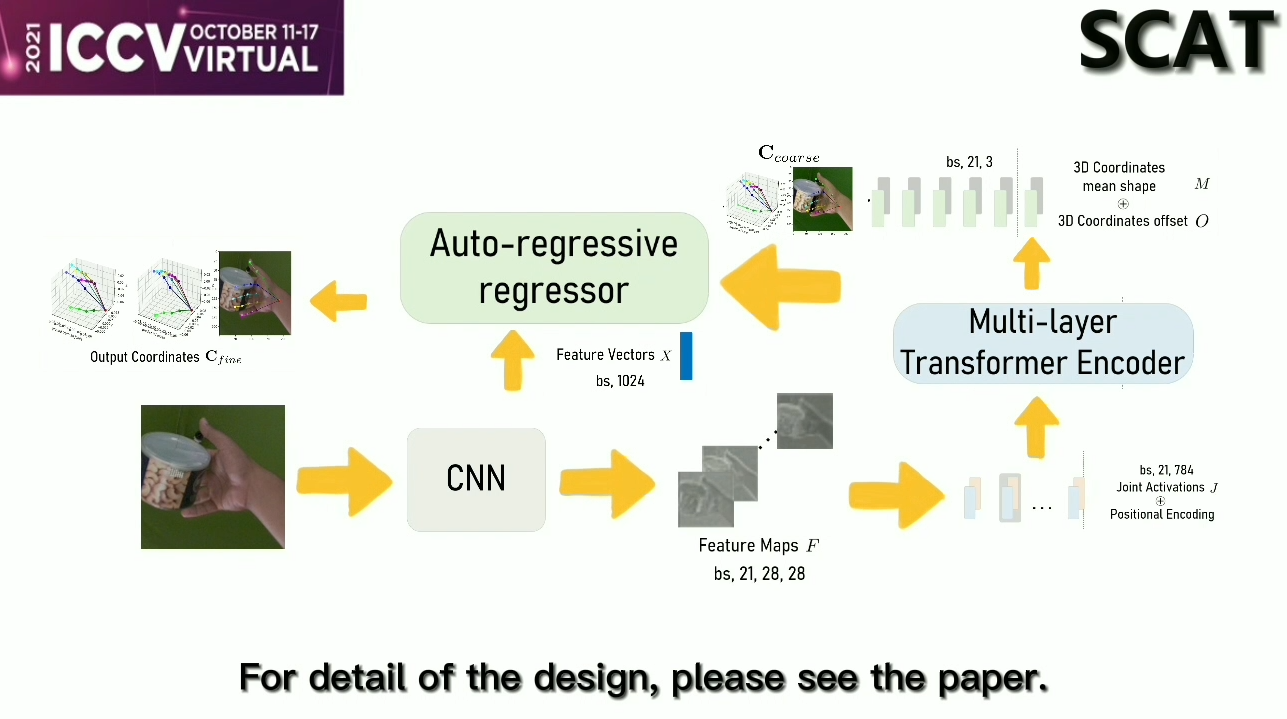
SCAT: Stride Consistency with Auto-regressive regressor and Transformer for hand pose estimation (ICCVW 2021)
Our approach SCAT (Stride Consistency with Autoregressive regressor and Transformer, SCAT) offers a new representation for measuring hand poses. The new representation includes a mean shape hand template and its 21 hand joint offsets depicting the 3D distances between the hand template and the hand that needs to be estimated. Besides, SCAT can generate a robust and smooth linear mapping between visual feature maps and the target 3D offsets, ensuring inter-frame smoothness and removing motion jittering. We also introduce an auto-regressive refinement procedure for iteratively refining the hand pose estimation. Extensive experiments show that our SCAT can generate more accurate and smoother 3D hand pose estimation results compared with the state-of-the-art methods.
ICCV Workshop 2021 SOMOF
-
pip install requirements.txt. -
download
MANO_RIGHT.pklfrom MANO official website and put it intoextra_datafolder. -
user need specify their own STB, Ho-3D and FreiHand dataset path and file (
MultiDataset.py) indatasetfolder for testing.
python train.py --hand_choice mano --lr 5e-4 --net reg_transformer --batch_size 96 --epoch 40 --stage 3 --l_weight_3d 100000 --l_weight_2d 10 --checkpoint_folder experiments/ablation/20220728 --pl_reg True --debug_img 20220728 --vit_heads 8 --iteration 3 --pos_embed True --vit_dropout 0.0 --mask_rate 0.2 > debug_logs/20220728.log-
mask_rate: masking ratio
-
vit_heads: head number
-
iteration: iterations
-
pos_embed: position embedding
-
pl_reg: path length regularization
- 2021.02.01
① dataloader
② warmup
- 2021.02.05
① different backbone
② transformer (PE, random masking mechanism)
- 2021.02.07 milestone
① more robustness structure
② blender ---> mean xyz of MANO right hand, let network predict offset term.