This repository contains C++ code implementing an unscented Kalman filter for object tracking on noisy lidar and radar measurements.
To build run cmake .. && make from the build directory.
Running against the sample data-set achieves RMS error values as follows.
| variable | RMSE |
|---|---|
| p_x | 0.0695 |
| p_y | 0.0980 |
| v_x | 0.342 |
| v_y | 0.241 |
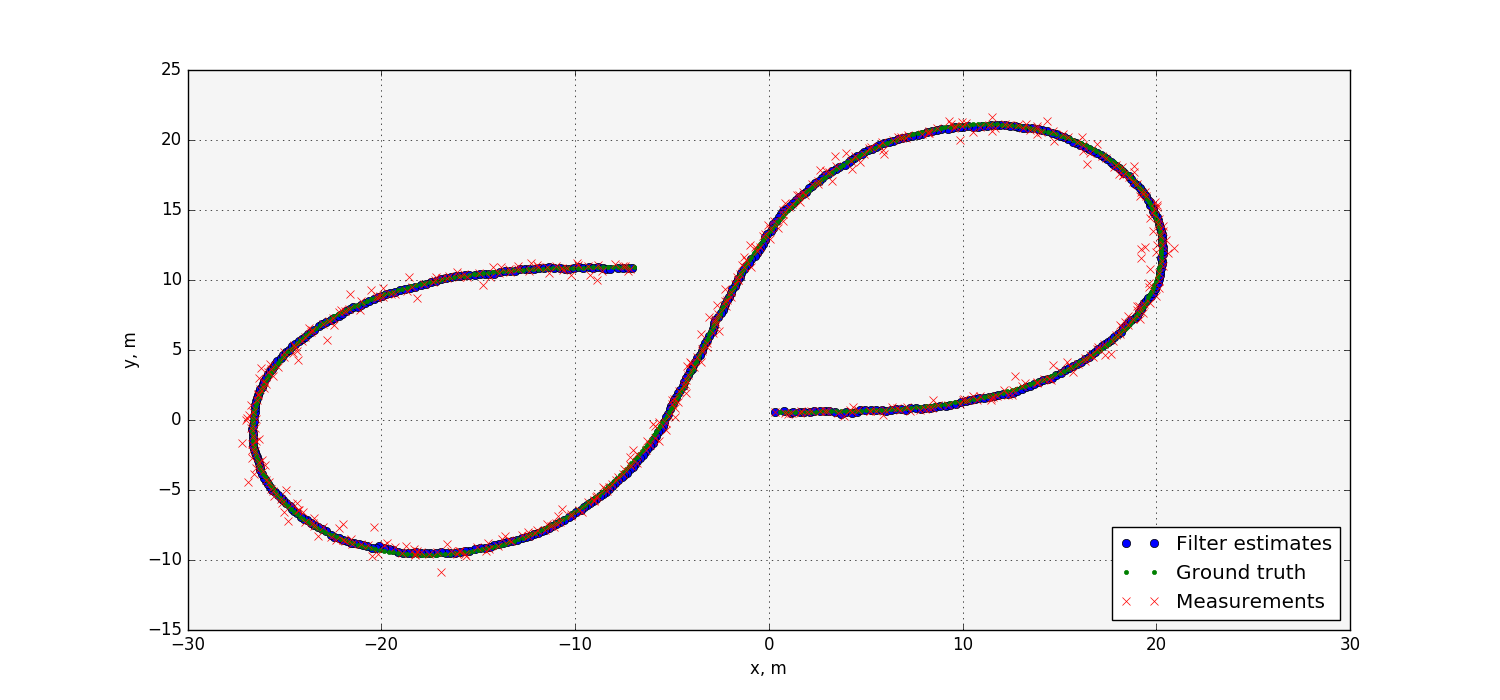
The evaluate.py script generates the following plots from the output data file:
- Plot of measurements, ground truth and filtered values for the x- and
y-positions, demonstrating how the filter removes measurement noise from its
estimates:
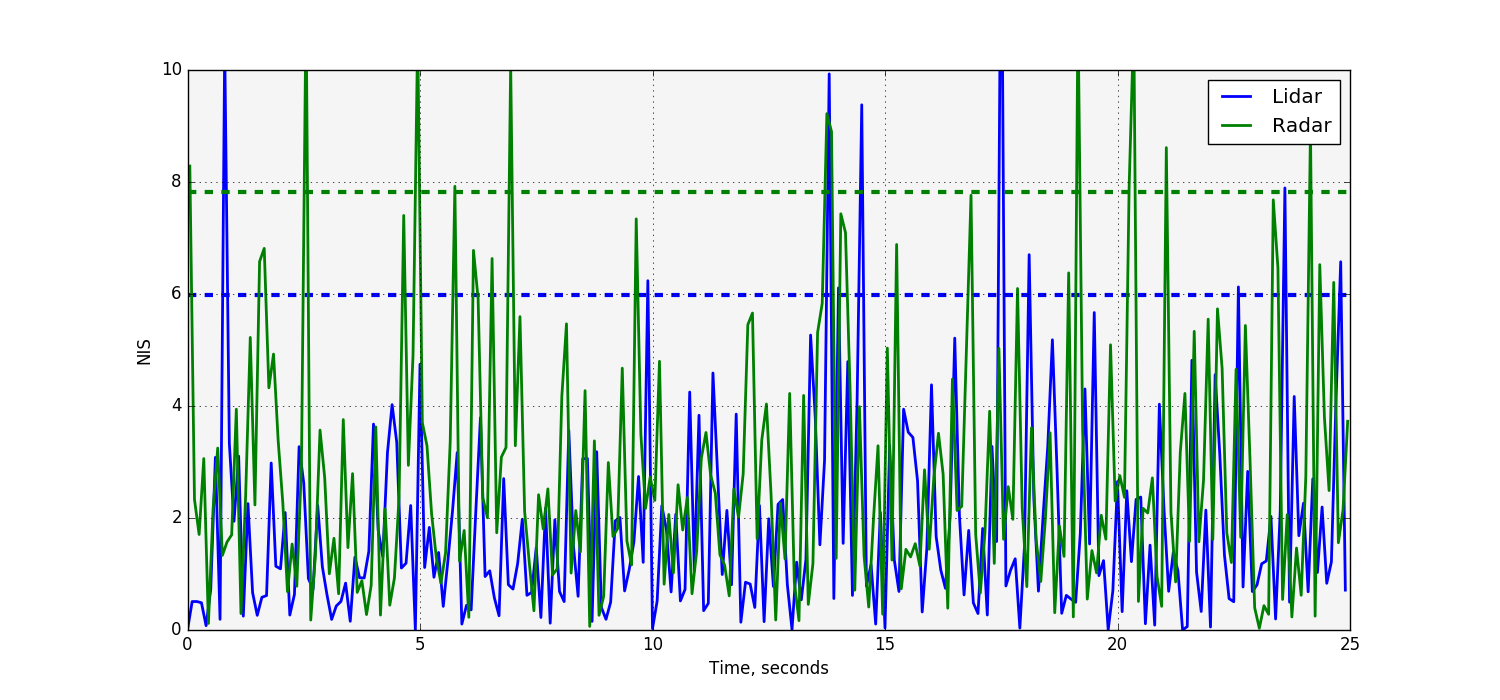
- Plot of normalised innovation squared (NIS) values for the lidar and radar
estimates, along with 95% line for a chi-squared distribution. This plot can
be helpful when tuning parameters (i.e. process noise estimates):