Leveraging-Adversarial-training-for-Monocular-Depth-Estimation
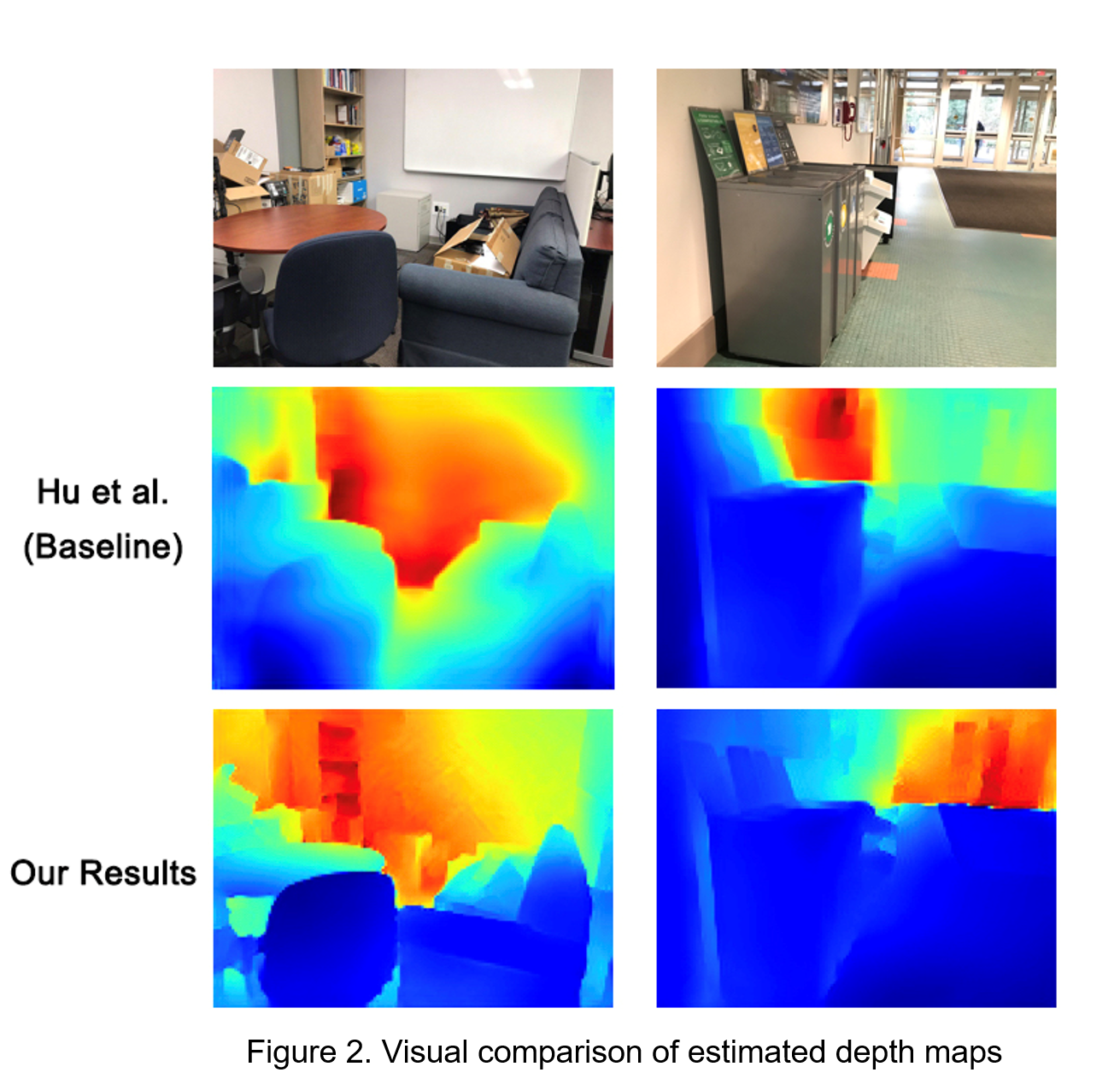
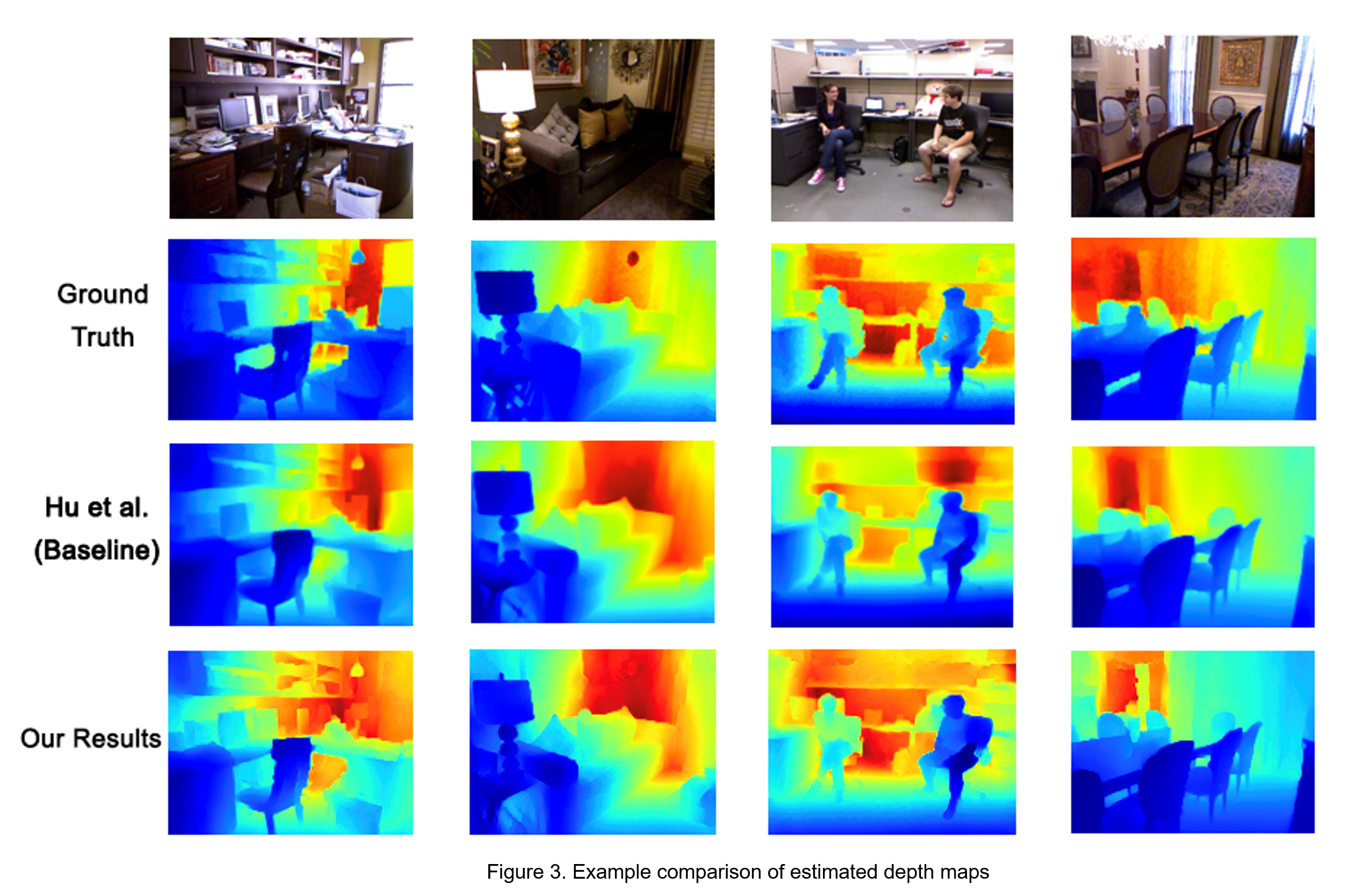
Achieving higher accurcay in the details of the objects in depth maps by adding a discriminator network, adversarial training, and introducing two new loss functions for monocular depth estimation
Parham Yassini*, Taher Ahmadi*, Elnaz Mehrzadeh*, Dorsa Dadjoo*, Fatemeh Hasiri*
*Equal Contribution
Results
Dependencies
- python 3.7
- Pytorch 1.3.1
Running
Download the trained models and put in the root of project:
Depth estimation networks
Download the data and put it in the the following structure:
NYU-v2 dataset
.(project root)/data/
├── nyu2_test
├── nyu2_test.csv
├── nyu2_train
└── nyu2_train.csv
-
Demo
python demo.py -
Test
python test.py -
Training
python train.py
Citation
this work is a extension on the: Revisiting Single Image Depth Estimation: Toward Higher Resolution Maps With Accurate Object Boundaries. Junjie Hu et al.