
- >=cmake 3.10
- pcl 1.8
- Eigen3
- Ceres 2.0.0
- OpenCV 3.4.5
-
We provide tests in real world traffic scenes. There are two examples in real world traffic scenes in feature folder. The feature/feature folder stores the selected 2d features. The feature/feature_bit is the bit image for distance transform(This is auto generated). The feature/3d_feature folder stores the selected 3d features.
-
If you want to extract features by hand, refer to doc/extract_feature.md
-
Run the example
-
modify the initial intrinsic and extrinsic paramter in config/param.yaml like:
# image0 image_path: "/home/jingxin/traffic-LiDAR-camera-calibration/feature/image2/image2.jpg" feature_num: 15 fx: 2000 fy: 2000 cx: 960 cy: 540 extrinsic: [9.88910941e-01, 1.48500658e-01, 1.64494210e-03, 2.20000000e+01, 5.18266263e-02, -3.34706924e-01, -9.40895996e-01, -1.50000000e+01, -1.39173101e-01, 9.30547597e-01, -3.38691627e-01, 8.00000000e+01, 0.00000000e+00, 0.00000000e+00, 0.00000000e+00, 1.00000000e+00] -
build and run main.cpp
cd traffic-LiDAR-camera_calibration mkdir build cd build cmake .. make ./main
-
-
Results:
After the convergence, you will see the results like this:
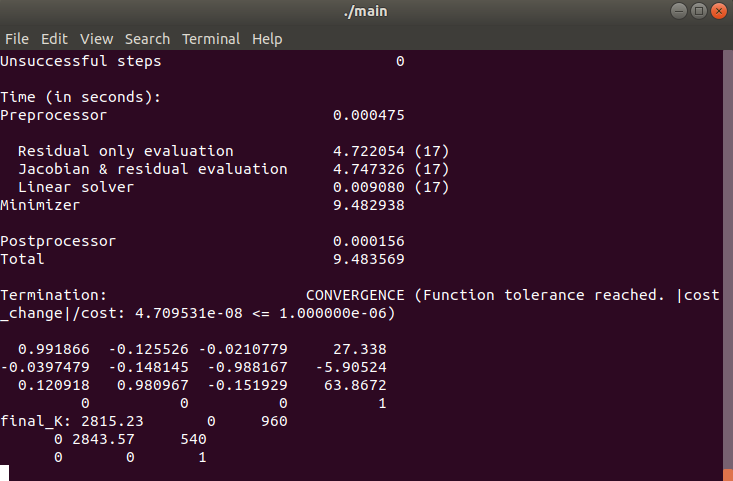
The intrinsic and extrinsic results will be printed on the console. And the initial reproject and final reproject will be shown like this.
initial:
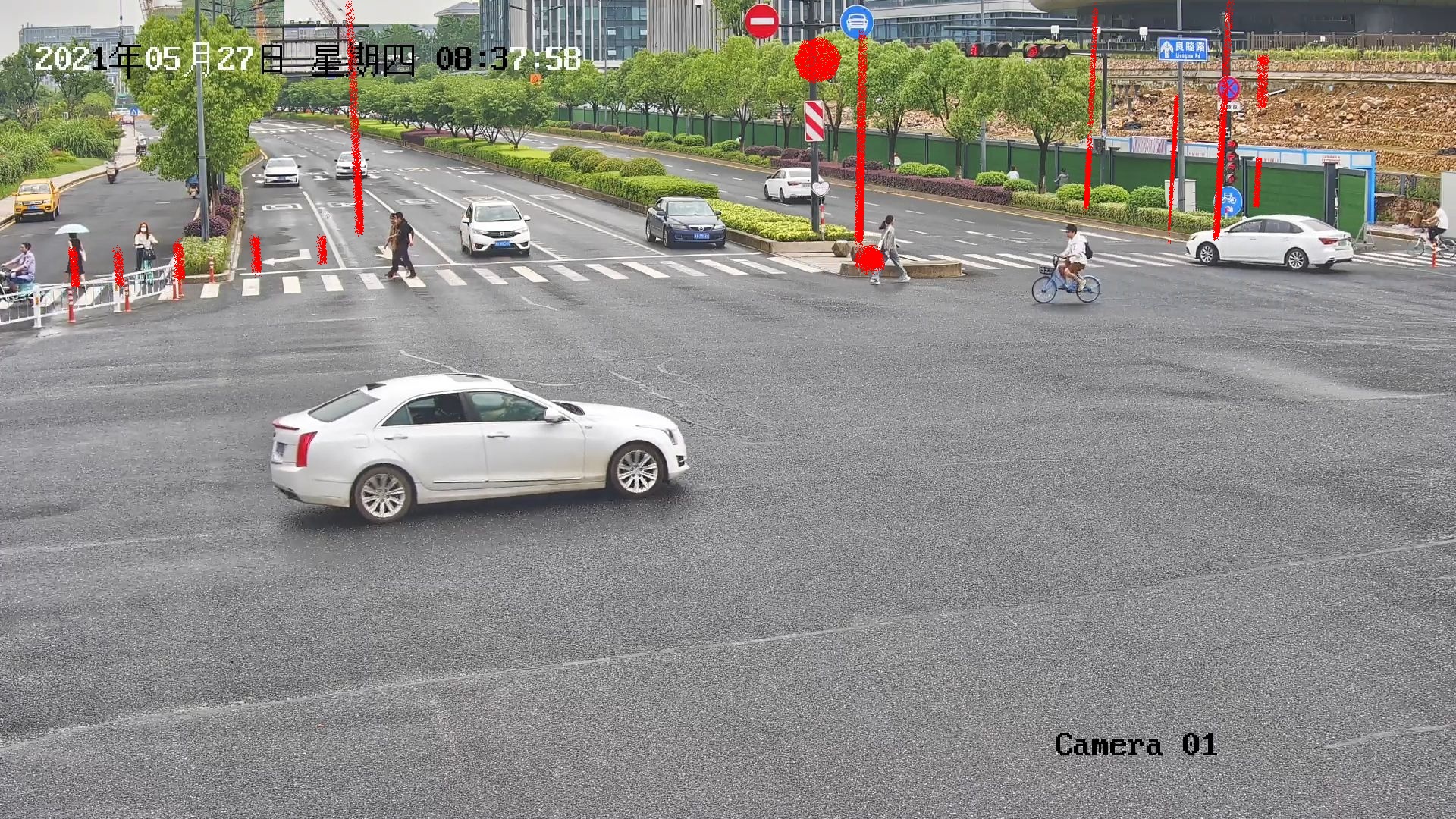
final:






- rough calibration(coming soon)
- simulation code(coming soon)