This is a python module to control serial servos (such as LX-224) connected to a serial bus servo controller from a windows machine or a linux machine (such as Raspberry Pi).
LX-224 (https://www.hiwonder.hk/products/hiwonder-lx-224-intelligent-serial-bus-servo)
serial bus servo controller (https://www.hiwonder.hk/collections/servo/products/serial-bus-servo-controller)
In order to make a robot, I used hiwonder's servo (LX-224) and control board (serial bus servo controller), and I tried to control it from python by connecting raspberry pi and control board via USB serial connection. However, there was not much information available, it took a lot of time until I was able to use it.
In consideration of future use, I created a python module to control the servo from a PC through the control board.
I hope it will be usefull for those who are looking for the same kind of usage as me.
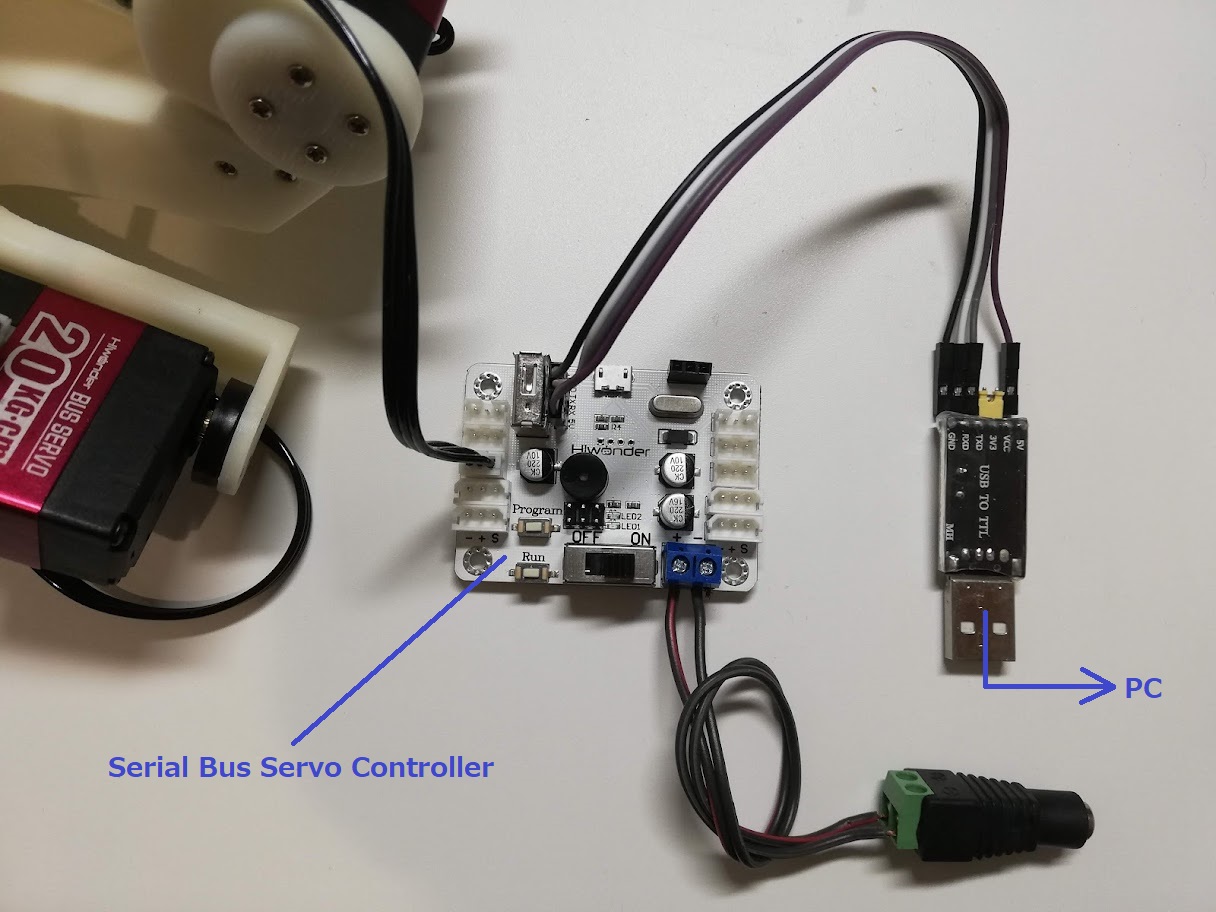
The main connection procedure is in the following three steps.
- Connect the serial pins of the control board to the USB serial converter.
- Connect the USB serial converter to the PC (such as raspberry pi).
- Connect servos and power supply as necessary.
git clone https://github.com/aakmsk/serial_bus_servo_controller_python_module.git
cd serial_bus_servo_controller_python_module/scripts
Start the python interpreter.
import serial_bus_servo_controller as sbsc
controller = sbsc.SBS_Controller("/dev/ttyUSB0")
Pass the device name corresponding to the USB serial converter as an argument, and instantiate the SBS_Controller class defined in the module.
- Control specified servos
# This is an example of rotating servos with IDs 1 and 2 to positions 100 and 400, respectively, in 500ms.
controller.cmd_servo_move([1, 2], [200, 400], 500)
- Get the rotation positions of specified servos
# Get the current rotation position of the servos with IDs 1 and 2
p_val = controller.cmd_mult_servo_pos_read([1, 2])
- Power off the specified servos
# Power off the servos with IDs 1 and 2
controller.cmd_mult_servo_unload([1, 2])
- Get the battery voltage
b_val = controller.cmd_get_battery_voltage()
| date | Details |
|---|---|
| 2021/08/20 | first commit |