mwptools
"A mission planner for the rest of us"
Overview
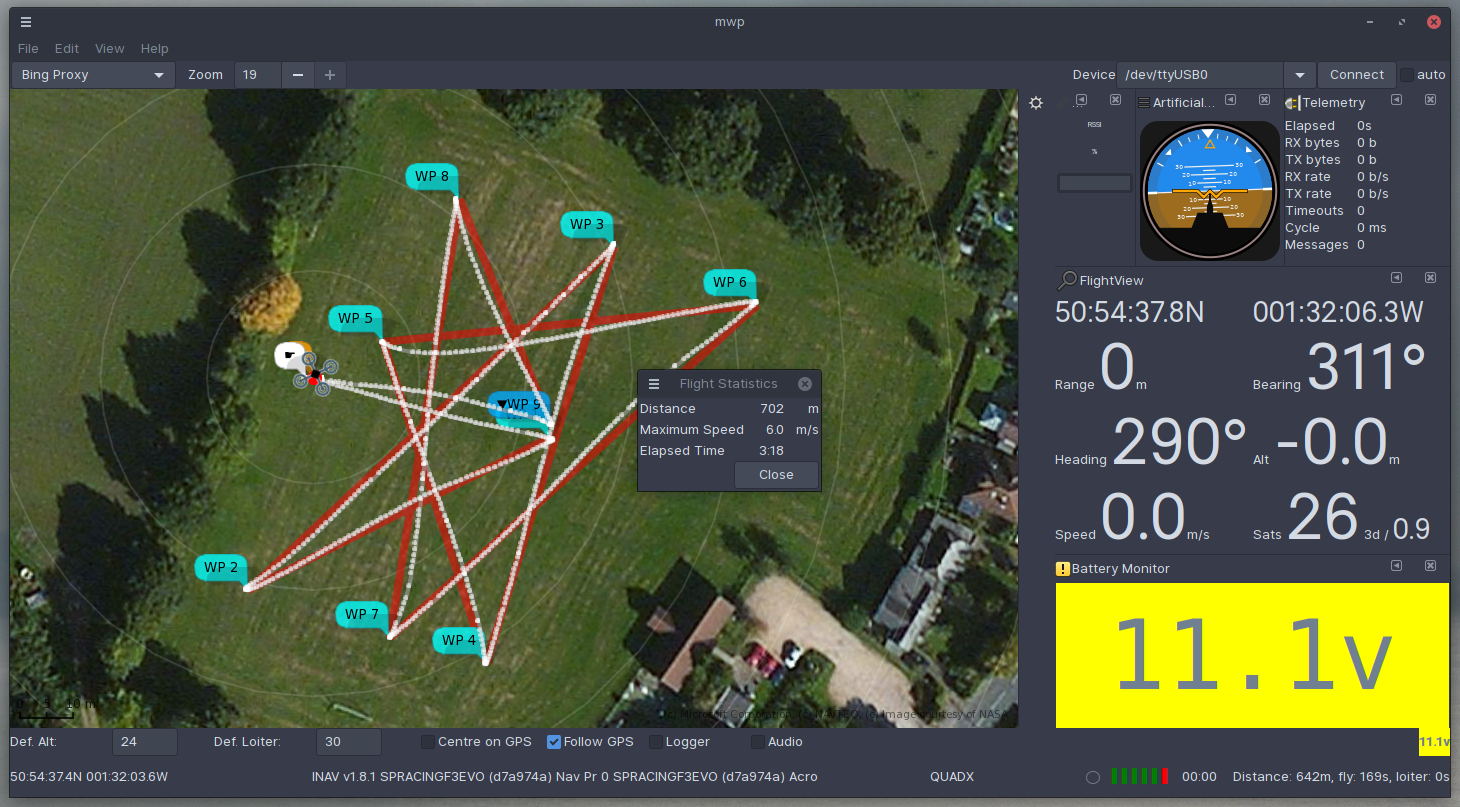
mwptools provides a mission planner, ground control station, real time flight logger and log replay / blackbox replay functions for the inav FC firmware.
mwptools supports the full set of inav and multiwii WP types.
mwp supports the following telemetry protocols:
- MSP (MultiWii Serial Protocol)
- LTM (Lightweight Telemetry)
- MAVLink (iNav subset)
- Smartport
mwp also supports the real-time display of adjacent aircraft using:
- inav-radar (INAV UAS)
- MAVlink Traffic Report (e.g. full-size aviation, typically ADS-B via a device such as uAvionix PingRX)
mwp also provides logging and the replay of:
- mwp log files
- Blackbox logs
- OpenTX CSV sdcard logs
In addition, mwp proivdes legacy suport for multiwii navigation functions.
Tools
- mwp : "A mission planner for the rest of us". Simple mission planning and monitoring. Mission Planning is provided for inav and MW-NAV (MW 2.4+). Monitoring, logging and recording for inav and MultiWii
- fc-cli : Manage backup and restoration of CLI dump and diff (fc-set, fc-get)
Miscellaneous
- Tools to transform mwp log files to SQL, GPX and KML, analyse black box logs, Ublox GPS and more.
Platforms and OS
The tools are designed to be portable and as far as possible platform and architecture agnostic. The suite is developed on Arch Linux and is tested on Debian (Buster, Sid), Ubuntu (latest and most recent LTS), Fedora (current) and FreeBSD (current release). mwp also runs on MS Windows, but is less well tested.
mwp should build and running on any platform that supports (recent versions of):
- gtk+3.0 (3.18 or later);
- vala and gcc;
- Clutter (software GL is fine);
- libchamplain;
- libespeak;
- libgdl;
- POSIX API
- mspsim requires Posix pseudo-terminals.
Please see the docs directory for specific development requirements for individual OS.The docs directory also contains a user guide / manual in ODT and PDF formats (docs/mwptools.{odt,pdf}).
mwptools is tested on x86_64, ia32 and ARM32 devices (Linux / FreeBSD).
It is also possible to build and run mwp on MS Windows using:
- Cygwin
- Windows 10 / WSL
- A virtual machine with a Linux guest.
The wiki provides further guidance.
Other OS / See also
For OS not supported by mwp (e.g. MacOS, IOS, Andriod), see also https://github.com/stronnag/impload for a mission format converter and upload application.
Installation
-
Review / install the dependencies for your platform. The documentation directory lists dependencies for Fedora and Debian/Ubuntu like systems.
-
Clone the repository
git clone https://github.com/stronnag/mwptools.git -
Compile and install
cd mwptools make && sudo make install
If you're new to Linux (or just new to mwp), see also the easy install wiki page, which describes installing to an Ubuntu VM using VirtualBox hosted on a Windows computer.
Support questions are best asked in the RC Groups board
Updating
As mwptools makes no formal releases, you can update your installation from the master branch:
cd mwptools # the initial installation directory
git pull && make && sudo make install
Arch Linux
Arch users can install mwptools from the AUR package mwptools-git
Compatibility
As well as supporting inav, mwp aims to be compatible with EOSBandi's WinGUI for MW. It used the same XML mission file format (with mwp extensions) and aims to provide similar functionally where it is possible to reverse engineer the required protocol formats.
Licence
GPL v3 or later