Walkino
Programming your Walkera R/C receiver with the Arduino IDE.
Objectives
Basic idea for this project was to develop alternate firmwares for some Walkera R/C receivers. After analyzing two popular receivers, one the RX2634H from the QR-Ladybird and the other the RX2635H from the Hoten-X both based on the Atmel XMEGA32A4 it looked feasible that this could be done.
And whats the easiest way today to develop software for microcontrollers? Right! It's the Arduino IDE. So this project provides all thats needed to integrate these board into the Arduino IDE.
Successful tests where performed with legacy IDEs version 1.6.5 up to the current version (as of this writing) 1.8.19. as well as current Arduino IDE v2.0.3. Linux and Windows are equally supported, MAC OS was not tested.
Additional information about the hardware of both receivers as well as for this project could be found in a series of blog posts about Walkino.
Even if you are not into R/C quadcopters this project could be interesting. The boards are relatively cheap available on platforms like Amazon or ebay and provide a great platform for Atmel XMEGA based development and contain a lot of interesting sensors.
Installation
First install Arduino IDE. Next you have two options to install this project.
Install as board package
This is the standard way to install Walkino.
-
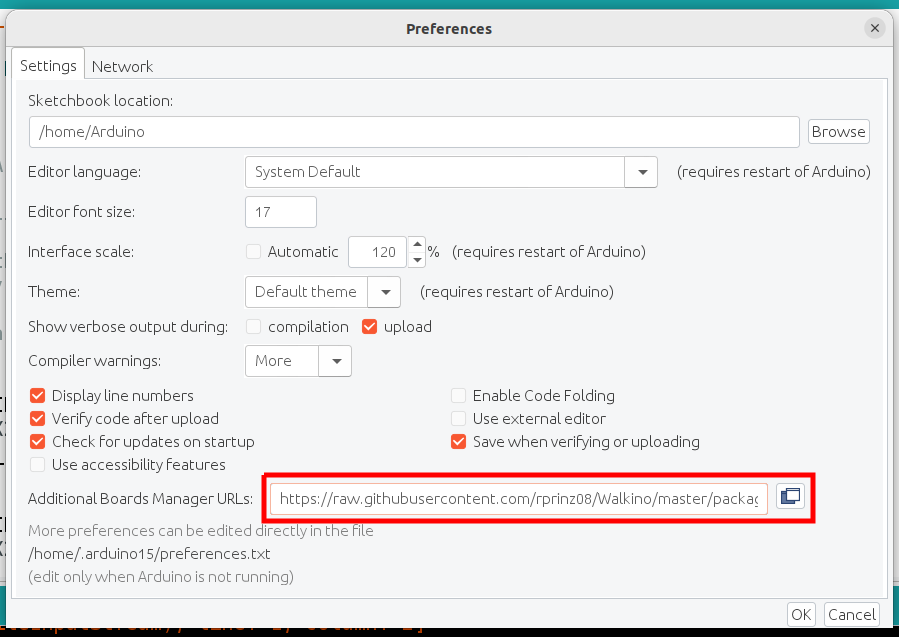
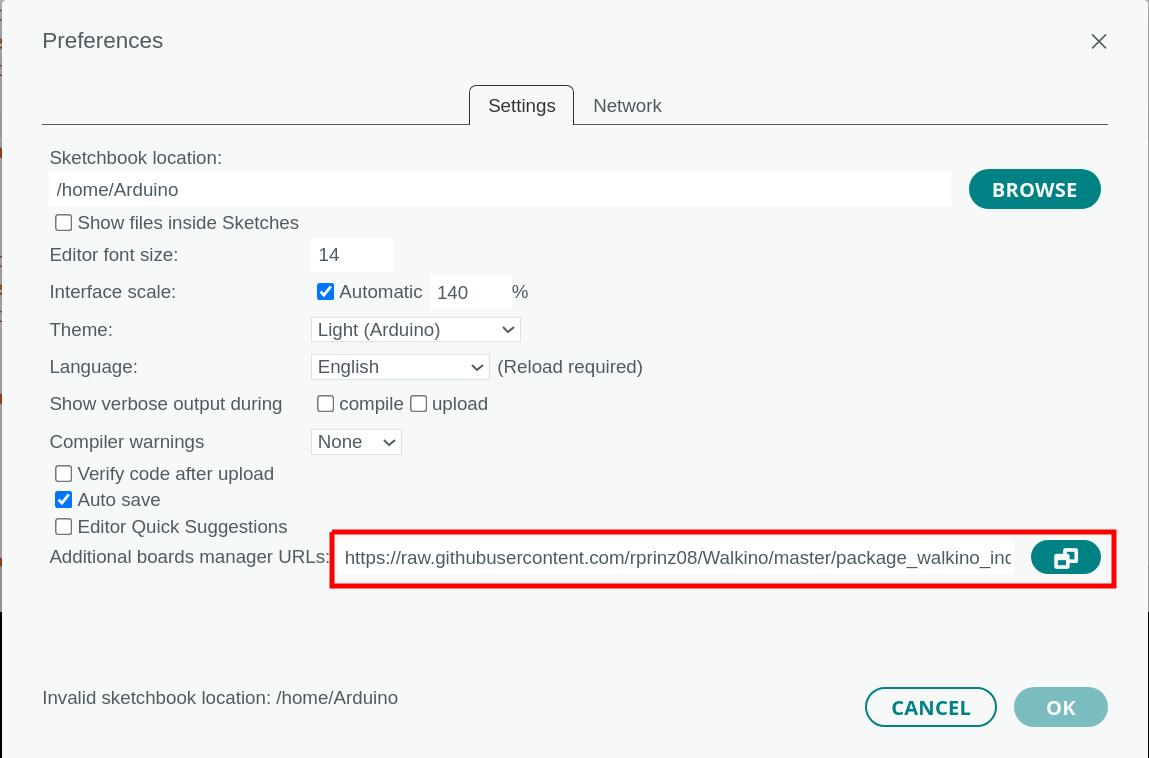
Add the Walkino board index URL
https://raw.githubusercontent.com/rprinz08/Walkino/master/package_walkino_index.jsonto the list of indices in the Arduino IDE settings as shown in the pictures below:
a. for IDE v1.x
File/Preferences
b. for IDE v2.x
File/Preferences
-
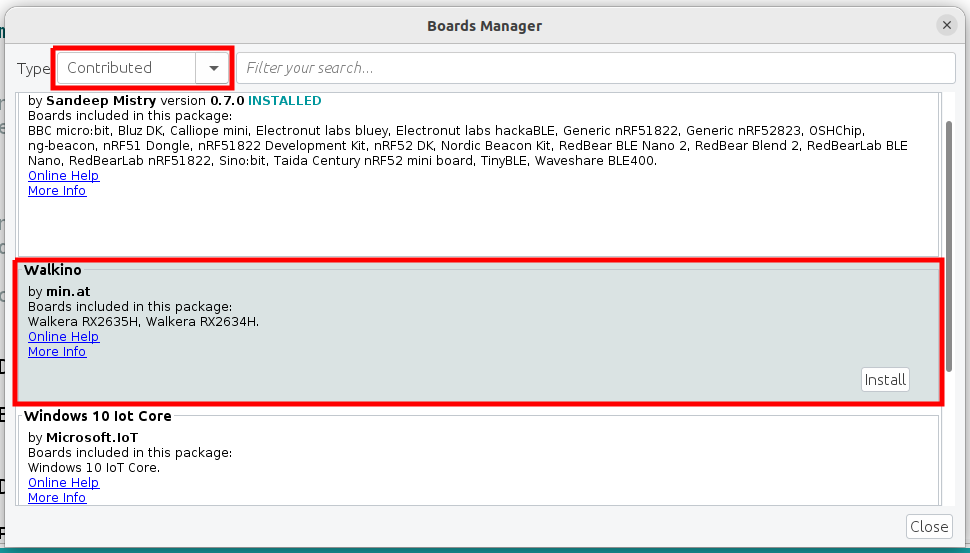
Install Walkino via board manager:
a. for IDE v1.x
Tools/Board/Boards Manager
b. for IDE v2.x
Tools/Board/Boards Manager
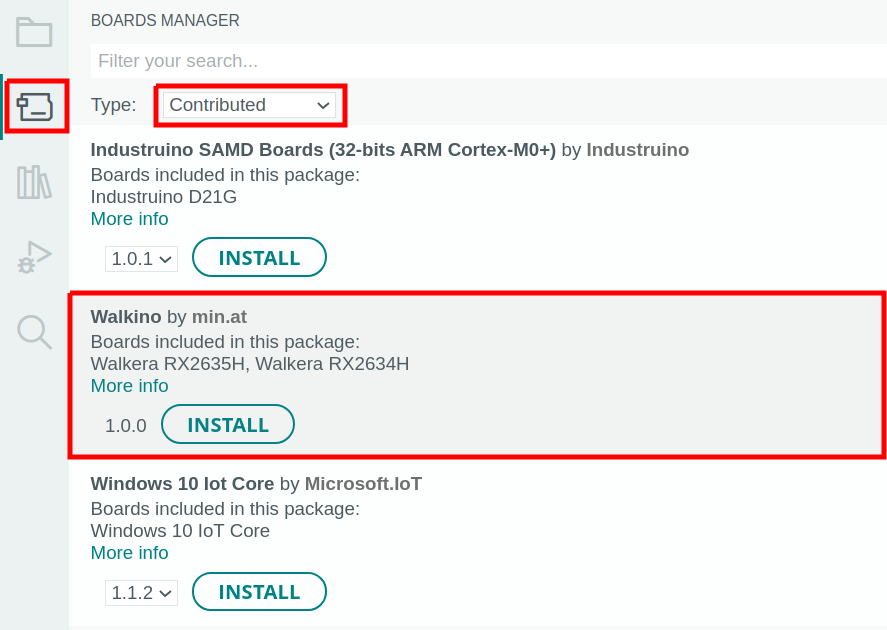
This also automatically installs the required uploader tool UP42 for the host platform.




Legacy install
The legacy install is usefull for older IDE's which dont support installation of board packages.
This method is deprecated and only available for documentation purposes.
-
Download the distribution ZIP file end extract it into the root directory of the Arduino IDE (the folder which contains the file arduino which starts the IDE).
-
The other way is to clone the GIT repository right into the IDE folder. This has the advantage that updates could be easily done using git update.
Both methods do not overwrite or change any files of the standard IDE installation and can be completely removed using the provided walkino-remove.sh (for Linux or walkino-remove.cmd for Windows) script.
Included in this project are compiled binaries of the UP42 utility which is needed to transfer compiled sketches to the receiver. This is only required for legaxy install! You could also compile it yourself from source for security reasons if you want. Versions for Windows and Linux are provided as 32bit and 64bit binaries. If you are on a 32bit system you have to manually rename the 32bit versions up42-32 to up42 as the default is 64bit. These utilities could be found in the hardware/tools/walkera/linux or hardware/tools/walkera/windows folders inside the Arduino IDE folder.
To connect the receiver boards to the development PC either an original Walkera UP02 or a USB to serial converter is needed.
More infos about that topic are available here and here.
Usage

Select one of the two new boards which are available After installation under the Tools/Board menu. Then select the serial port where the board is connected.
To start you can select one of the available examples under menu File / Examples / Walkino
Contributing / Developing
Walkino is not 100% complete or bug free. If you found any bug or have an idea for improvements - great! Feel free to contribute.
- Fork it on github!
- Create your feature branch:
git checkout -b my-new-feature - Commit your changes:
git commit -am 'Add some feature' - Push to the branch:
git push origin my-new-feature - Submit a pull request :-)
To start development no dependencies except the Arduino IDE are needed. I personally develop using Visual Studio Code as an editor and this project includes a workspace settings folder for it. If you prefer another editor just ignore this folder.
-
Open root folder of Arduino IDE with vscode and start coding. Especially files under hardware/walkera/xmega/ are relevant if you would like to understand or modify things.
-
Press CTRL+SHIFT+B in vscode builds project dist ZIP file.
Notes
Most of the receivers hardware is already supported by Walkino. Serial port, red LED on RX2635H and red/green LED on RX2634H, two I2C and one SPI bus works. Components like ITG-3205 mems gyro and MMA-8452 are accessible via I2C and libraries are included. The wireless USB CYRF-6936 is accessible via SPI but currently not supported as no library is included in Walkino. Also measuring the current battery voltage is supported.
The used receiver boards still use the original Walkera bootloader so it's possible to flash back original Walkera receiver firmware and use them for what they were intended: as R/C quadcopter receivers.
The original bootloader supports the feature to specify an 80 byte identification string which is shown by the bootloader ID command. Such an ID could be specified with the FW_ID preprocessor macro. Any string can be used as long as it is less then or equal to 80 bytes (including NULL C-string termination character) and starts with "Name:". It's valid if the ID does not start with "Name:". In such a case the bootloader does not report it back and uses an empty string instead (even if the ID is included in the firmware).
History
- Alpha Version 17.2.2016
- First Public Beta 7.10.2016
- Update to support Arduino IDE v2 3.1.2023
Credits
Credits go to all used components libraries. Especially for some parts of https://github.com/XMegaForArduino/arduino
Portions of this work are from the XMegaForArduino project and are Copyright (c) 2015 by S.F.T. Inc. - all rights reserved
License
This software is provided 'as-is' with no warranty, implied or otherwise.
Walkino copyright richard.prinz@min.at 2015 - 2023
This project is under GNU GPLv3. See file gpl-3.0-walkino.txt in this project or http://www.gnu.org/licenses/gpl-3.0.html