DWA can not add parameter
LGK199408 opened this issue · comments

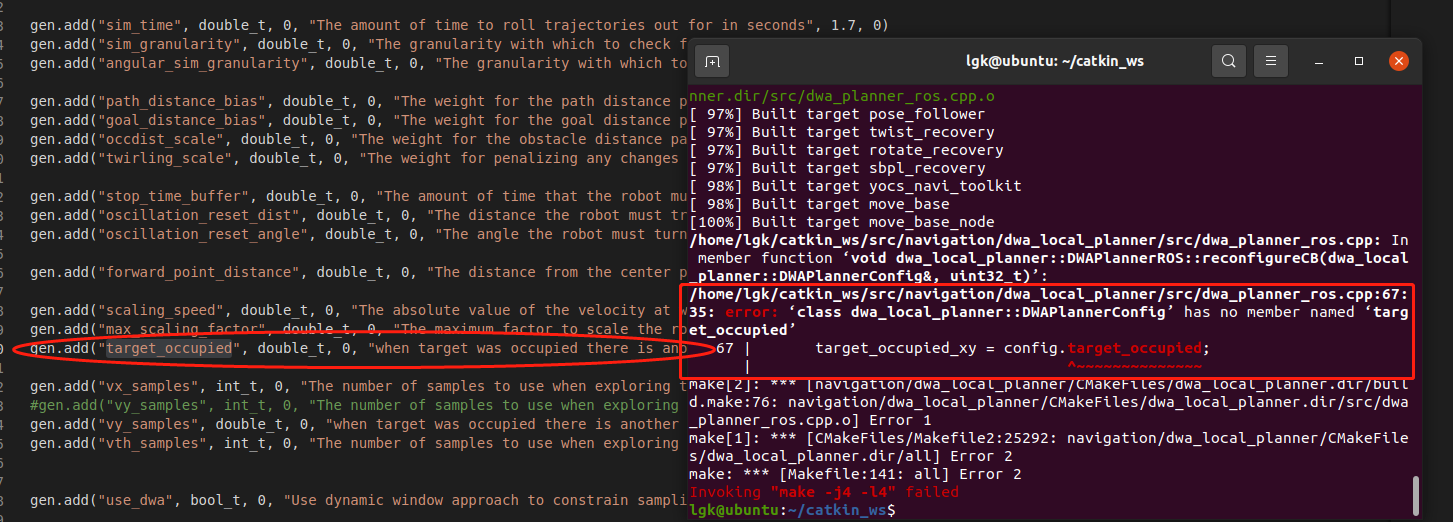
I had added a parameter into DWAPlanner.cfg in line 30
gen.add("target_occupied", double_t, 0, "when target was occupied there is another xy_goal_tolerance", 0.5, 0.0, 1.0)
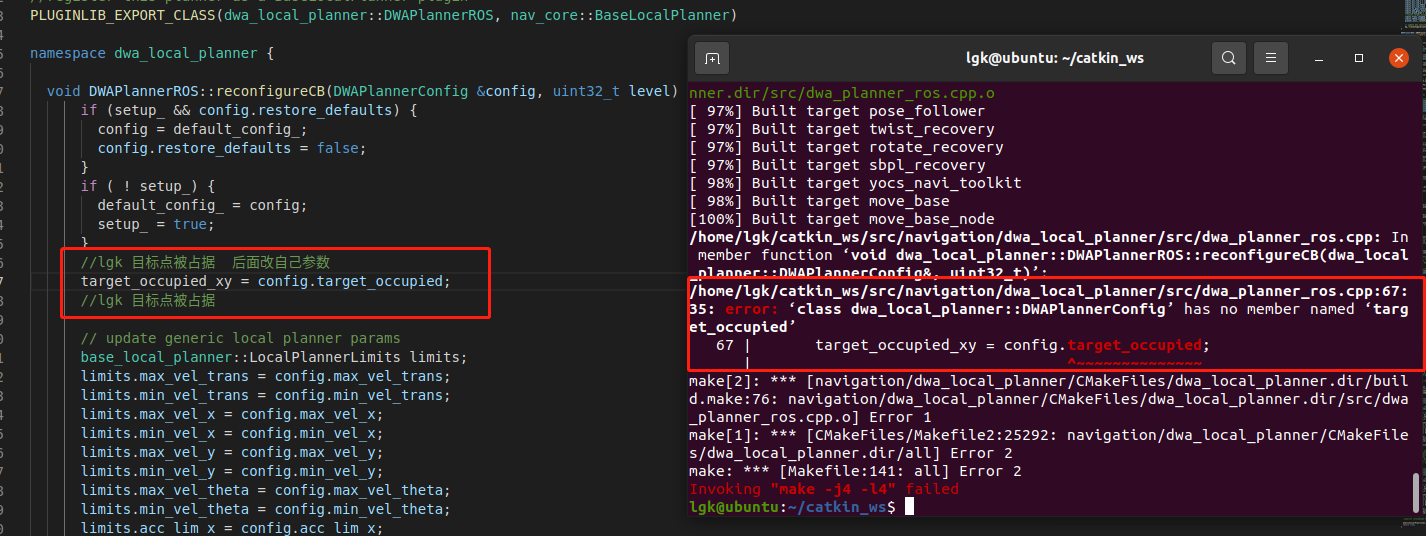
and then invoked the parameter in dwa_planner_ros.cpp in line 67
double target_occupied_xy1 = config.target_occupied;
and then catkin_make
error was occured...
home/lgk/catkin_ws/src/navigation/dwa_local_planner/src/dwa_planner_ros.cpp: In member function ‘void dwa_local_planner::DWAPlannerROS::reconfigureCB(dwa_local_planner::DWAPlannerConfig&, uint32_t)’: /home/lgk/catkin_ws/src/navigation/dwa_local_planner/src/dwa_planner_ros.cpp:67:43: error: ‘class dwa_local_planner::DWAPlannerConfig’ has no member named ‘target_occupied’ 67 | double target_occupied_xy1 = config.target_occupied; | ^~~~~~~~~~~~~~~

Does the error persist if you try building again?
Yes @DLu

This appears to be some issue with your local workspace - not a bug in the navigation stack (this repo). Please post to answers.ros.org as there are many more folks over there to help out with debugging.