Official PyTorch implementation of LCDNet.
You can install LCDNet locally on your machine, or use the provided Dockerfile to run it in a container. The environment_lcdnet.yml file is meant to be used with docker, as it contains version of packages that are specific to a CUDA version. We don't recommend using it for local installation.
- Install PyTorch (make sure to select the correct cuda version)
- Install the requirements
pip install -r requirements.txt - Install spconv <= 2.1.25 (make sure to select the correct cuda version, for example
pip install spconv-cu113==2.1.25for cuda 11.3) - Install OpenPCDet
- Install faiss-cpu - NOTE: avoid installing faiss via pip, use the conda version, or build it from source alternatively.
Tested in the following environments:
- Ubuntu 18.04/20.04/22.04
- cuda 10.2/11.1/11.3
- pytorch 1.8/1.9/1.10
- Open3D 0.12.0
We noticed that the RANSAC implementation in Open3D version >=0.15 achieves bad results. We tested our code with Open3D versions between 0.12.0 and 0.14.2, please use one of these versions, as results might be very different otherwise.
We also noticed that spconv version 2.2 or higher is not compatible with the pretrained weights provided with this repository. Spconv version 2.1.25 or lower is required to properly load the pretrained model.
- Install Docker and NVIDIA-Docker (see here for instructions)
- Download the pretrained model (see Pretrained model section) in the same folder as the Dockerfile
- Build the docker image
docker build --tag lcdnet -f Dockerfile . - Run the docker container
docker run --gpus all -it --rm -v KITTI_ROOT:/data/KITTI lcdnet - From inside the container, activate the anaconda environment
conda activate lcdnetand change directory to the LCDNet foldercd LCDNet - Run the training or evaluation scripts (see Training and Evaluation sections). The weights of the pretrained model are copied inside the container under
/pretreined_models/LCDNet-kitti360.tar.
Download the SemanticKITTI dataset and generate the loop ground truths:
python -m data_process.generate_loop_GT_KITTI --root_folder KITTI_ROOT
where KITTI_ROOT is the path where you downloaded and extracted the SemanticKITTI dataset.
NOTE: although the semantic labels are not required to run LCDNet, we use the improved ground truth poses provided with the SemanticKITTI dataset.
Download the KITTI-360 dataset (raw velodyne scans, calibrations and vehicle poses) and generate the loop ground truths:
python -m data_process.generate_loop_GT_KITTI360 --root_folder KITTI360_ROOT
where KITTI360_ROOT is the path where you downloaded and extracted the KITTI-360 dataset.
To achieve better results, it is suggested to preprocess the datasets by removing the ground plane:
python -m data_process.remove_ground_plane_kitti --root_folder KITT_ROOT
python -m data_process.remove_ground_plane_kitti360 --root_folder KITT_ROOT360
If you skip this step, please remove the option --without_ground in all the following steps.
The training script will use all the available GPUs, if you want to use only a subset of the GPUs, use the environment variable CUDA_VISIBLE_DEVICES. If you don't know how to do that, check here.
To train on the KITTI dataset:
python -m training_KITTI_DDP --root_folder KITTI_ROOT --dataset kitti --batch_size B --without_ground
To train on the KITTI-360 dataset:
python -m training_KITTI_DDP --root_folder KITTI360_ROOT --dataset kitti360 --batch_size B --without_ground
To track the training progress using Weights & Biases, add the argument --wandb.
The per-GPU batch size B must be at least 2, and a GPU with at least 8GB of RAM is required (12GB or more is preferred). In our experiments we used a batch size of 6 on 4 x 24GB GPUs, for a total batch size of 24.
The network's weights will be saved in the folder ./checkpoints (you can change this folder with the argument --checkpoints_dest), inside a subfolder named with the starting date and time of the training (format %d-%m-%Y_%H-%M-%S), for example: 20-02-2022_16-38-24
To evaluate the loop closure performance of the trained model on the KITTI dataset:
python -m evaluation.inference_loop_closure --root_folder KITTI_ROOT --dataset kitti --validation_sequence 08 --weights_path WEIGHTS --without_ground
where WEIGHTS is the path of the pretrained model, for example ./checkpoints/20-02-2022_16-38-24/checkpoint_last_iter.tar
Similarly, on the KITTI-360 dataset:
python -m evaluation.inference_loop_closure --root_folder KITTI360_ROOT --dataset kitti360 --validation_sequence 2013_05_28_drive_0002_sync --weights_path WEIGHTS --without_ground
To evaluate the loop closure performance of the trained model on the KITTI and KITTI-360 dataset:
python -m evaluation.inference_yaw_general --root_folder KITTI_ROOT --dataset kitti --validation_sequence 08 --weights_path WEIGHTS --ransac --without_ground
python -m evaluation.inference_yaw_general --root_folder KITTI360_ROOT --dataset kitti360 --validation_sequence 2013_05_28_drive_0002_sync --weights_path WEIGHTS --ransac --without_ground
To evaluate LCDNet (fast), remove the --ransac argument.
A model pretrained on the KITTI-360 dataset can be found here
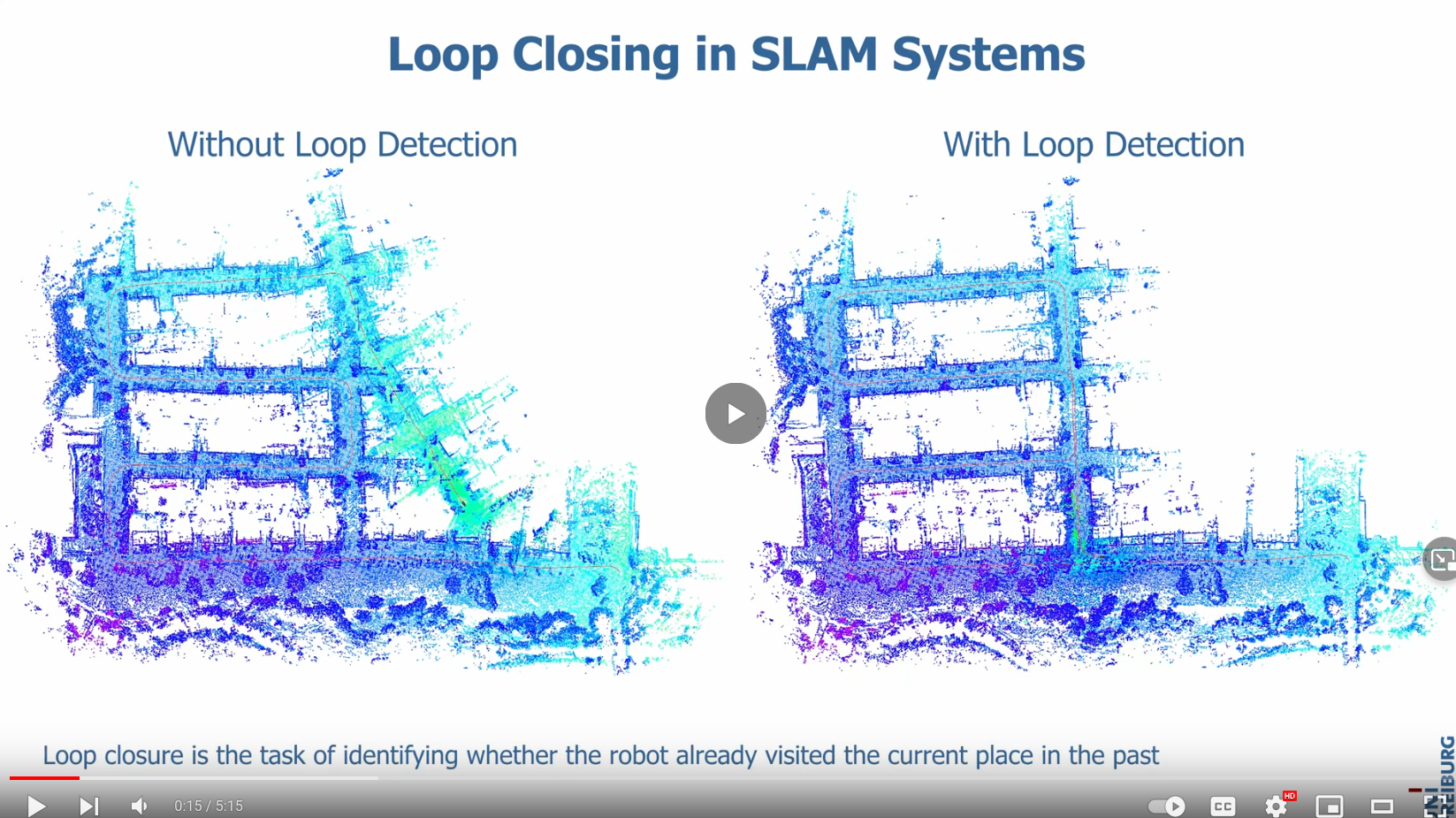
"LCDNet: Deep Loop Closure Detection and Point Cloud Registration for LiDAR SLAM"
If you use LCDnet, please cite:
@ARTICLE{cattaneo2022tro,
author={Cattaneo, Daniele and Vaghi, Matteo and Valada, Abhinav},
journal={IEEE Transactions on Robotics},
title={LCDNet: Deep Loop Closure Detection and Point Cloud Registration for LiDAR SLAM},
year={2022},
volume={38},
number={4},
pages={2074-2093},
doi={10.1109/TRO.2022.3150683}
}
For academic usage, the code is released under the GPLv3 license. For any commercial purpose, please contact the authors.