Syma helicopter IR protocol receiver
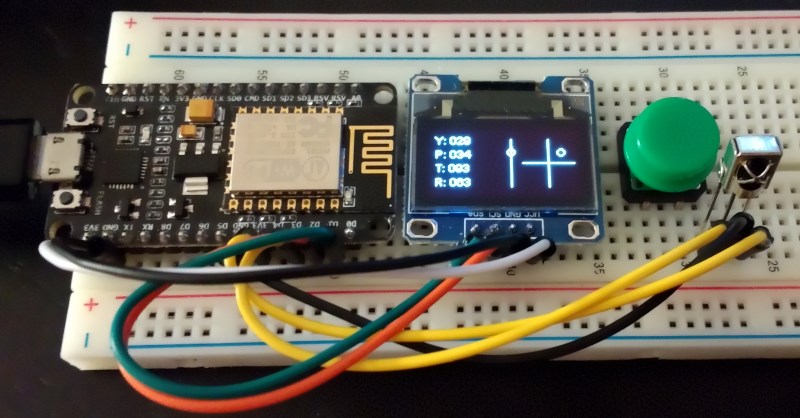
This is another simple project that I built to learn how to use more arduino and esp8266 libraries. This time it's semi-useful: it displays the controls of a Syma helicopter IR remote.
Had some fun decoding the protocol. Only after digging quite far did I find this invaluable article by Jim Hung which explains how the protocol works in great detail.
I would like to think that my implementation of decoding is much simpler. Just count the time between impulse rising edge (or falling since I'm using inverting output of 38khz IR receiver IC) and push those bits into a uint32_t. After 32 impulses (not counting the preambula bit) you are done. Your yaw, pitch, throttle and trim are encoded into the 4 bytes of uint32_t type in MSB to LSB order.
The rest of the code is just display output including some nice visuals of the controls.
Dependencies:
- Brzo I2C:
platformio lib install 335 - ESP8266_SSD1306 driver:
platformio lib install 562
To make it work connect SDA and SCL to D1 and D2 respectively, hook up IR receiver output to D3 and that's it.