cd ckpts && split -b 90m TrackNet_best.pt partTrack
每个分块(当然,最后一个不保证)大小都是50k,基本不可读。任何类型文件都可以用这种切割模式。 三、文件合并 不管用什么方式切割,合并方法不变。
cd ckpts && cat partTrack* > TrackNet_best.pt
-
生成视频
!cd TrackNetV3 && python predict.py --video_file test.mp4 --tracknet_file ckpts/TrackNet_best.pt --inpaintnet_file ckpts/InpaintNet_best.pt --save_dir prediction --output_video -
不生成视频
!cd TrackNetV3 && python predict.py --video_file test.mp4 --tracknet_file ckpts/TrackNet_best.pt --inpaintnet_file ckpts/InpaintNet_best.pt --save_dir prediction -
修改
prediction.py: 1num_workers = 0 # fixme: 不是0的话在 colab 上面会崩溃 # args.batch_size if args.`
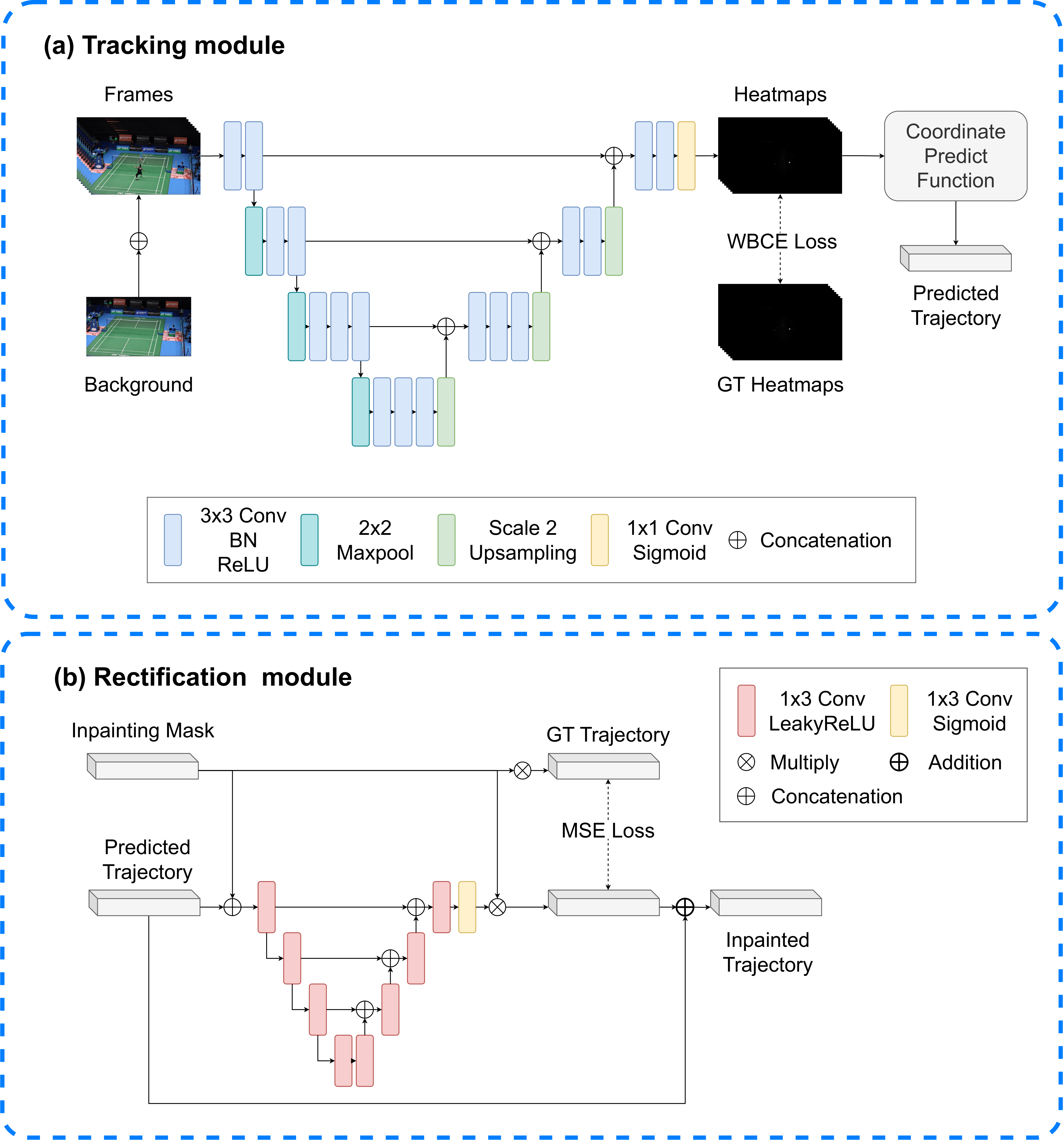
We present TrackNetV3, a model composed of two core modules: trajectory prediction and rectification. The trajectory prediction module leverages an estimated background as auxiliary data to locate the shuttlecock in spite of the fluctuating visual interferences. This module also incorporates mixup data augmentation to formulate complex scenarios to strengthen the network’s robustness. Given that a shuttlecock can occasionally be obstructed, we create repair masks by analyzing the predicted trajectory, subsequently rectifying the path via inpainting. [paper]
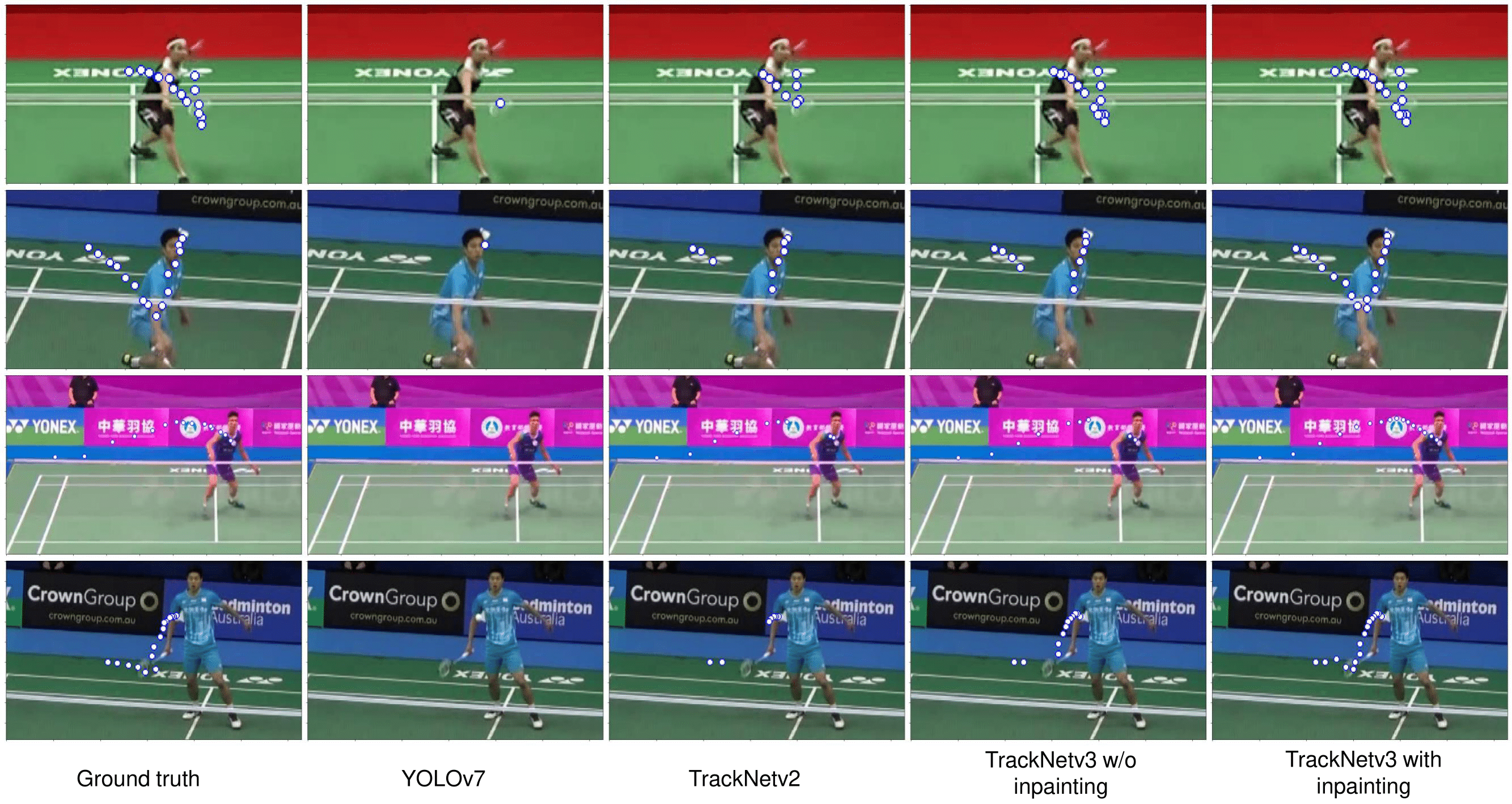
- Performance on the test split of Shuttlecock Trajectory Dataset.
| Model | Accuracy | Precision | Recall | F1 | FPS |
|---|---|---|---|---|---|
| YOLOv7 | 57.82% | 78.53% | 59.96% | 68.00% | 34.77 |
| TrackNetV2 | 94.98% | 99.64% | 94.56% | 97.03% | 27.70 |
| TrackNetV3 | 97.51% | 97.79% | 99.33% | 98.56% | 25.11 |
-
Develop Environment
Ubuntu 16.04.7 LTS Python 3.8.7 torch 1.10.0 -
Clone this reposity.
git clone https://github.com/qaz812345/TrackNetV3.git -
Install the requirements.
pip install -r requirements.txt
-
Download the checkpoints
-
Unzip the file and place the parameter files to
ckptsunzip TrackNetV3_ckpts.zip -
Predict the label csv from the video
python predict.py --video_file test.mp4 --tracknet_file ckpts/TrackNet_best.pt --inpaintnet_file ckpts/InpaintNet_best.pt --save_dir prediction -
Predict the label csv from the video, and output a video with predicted trajectory
python predict.py --video_file test.mp4 --tracknet_file ckpts/TrackNet_best.pt --inpaintnet_file ckpts/InpaintNet_best.pt --save_dir prediction --output_video
- Download Shuttlecock Trajectory Dataset
- Set the data root directory to
data_dirindataset.py. - Data Preprocessing
python preprocess.py - The
framedirectories and thevaldirectory will be generated after preprocessing. - Check the estimated background images in
<data_dir>/median- If available, the dataset will use the median image of the match; otherwise, it will use the median image of the rally.
- For example, you can exclude
train/match16/median.npzdue to camera angle discrepancies; therefore, the dataset will resort to the median image of the rally within match 16.
- The preprocessed dataset will be cached using npy files, so please ensure that you delete these files if you make any modifications to the dataset.
- Dataset File Structure:
data
├─ train
| ├── match1/
| │ ├── csv/
| │ │ ├── 1_01_00_ball.csv
| │ │ ├── 1_02_00_ball.csv
| │ │ ├── …
| │ │ └── *_**_**_ball.csv
| │ ├── frame/
| │ │ ├── 1_01_00/
| │ │ │ ├── 0.png
| │ │ │ ├── 1.png
| │ │ │ ├── …
| │ │ │ └── *.png
| │ │ ├── 1_02_00/
| │ │ │ ├── 0.png
| │ │ │ ├── 1.png
| │ │ │ ├── …
| │ │ │ └── *.png
| │ │ ├── …
| │ │ └── *_**_**/
| │ │
| │ └── video/
| │ ├── 1_01_00.mp4
| │ ├── 1_02_00.mp4
| │ ├── …
| │ └── *_**_**.mp4
| ├── match2/
| │ ⋮
| └── match26/
├─ val
| ├── match1/
| ├── match2/
| │ ⋮
| └── match26/
└─ test
├── match1/
├── match2/
└── match3/
- Attributes in each csv files:
Frame, Visibility, X, Y
-
Train the tracking module from scratch
python train.py --model_name TrackNet --seq_len 8 --epochs 30 --batch_size 10 --bg_mode concat --alpha 0.5 --save_dir exp --verbose -
Resume training (start from the last epoch to the specified epoch)
python train.py --model_name TrackNet --epochs 30 --save_dir exp --resume_training --verbose
- Generate predicted trajectories and inpainting masks for training rectification module
- Noted that the coordinate range corresponds to the input spatial dimensions, not the size of the original image.
python generate_mask_data.py --tracknet_file ckpts/TrackNet_best.pt --batch_size 16
-
Train the rectification module from scratch.
python train.py --model_name InpaintNet --seq_len 16 --epoch 300 --batch_size 32 --lr_scheduler StepLR --mask_ratio 0.3 --save_dir exp --verbose -
Resume training (start from the last epoch to the specified epoch)
python train.py --model_name InpaintNet --epochs 30 --save_dir exp --resume_training
-
Evaluate TrackNetV3 on test set
python generate_mask_data.py --tracknet_file ckpts/TrackNet_best.pt --split_list test python test.py --inpaintnet_file ckpts/InpaintNet_best.pt --save_dir eval -
Evaluate the tracking module on test set
python test.py --tracknet_file ckpts/TrackNet_best.pt --save_dir eval -
Generate video with ground truth label and predicted result
python test.py --tracknet_file ckpts/TrackNet_best.pt --video_file data/test/match1/video/1_05_02.mp4
-
Evaluate TrackNetV3 on test set and save the detail results for error analysis
python test.py --tracknet_file ckpts/TrackNet_best.pt --inpaintnet_file ckpts/InpaintNet_best.pt --save_dir eval --output_pred -
Add json path of evaluation results to the file list in
error_analysis.py30 # Evaluation result file list 31 if split == 'train': 32 eval_file_list = [ 33 {'label': label_name, 'value': json_path}, ⋮ ⋮ ] elif split == 'val': eval_file_list = [ {'label': label_name, 'value': json_path}, ⋮ ] elif split == 'test': eval_file_list = [ {'label': label_name, 'value': json_path}, ⋮ ] else: raise ValueError(f'Invalid split: {split}') -
Run Dash application
python error_analysis.py --split test --host 127.0.0.1
