URDF, xml : All links and joints are manually reverse engineered using assembly file from GRABCAD https://grabcad.com/library
Installation : GYM, MUJOCO, stablebaselines3 + (Linux)
PATH : ~/python3.8/site-packages/gym/envs/
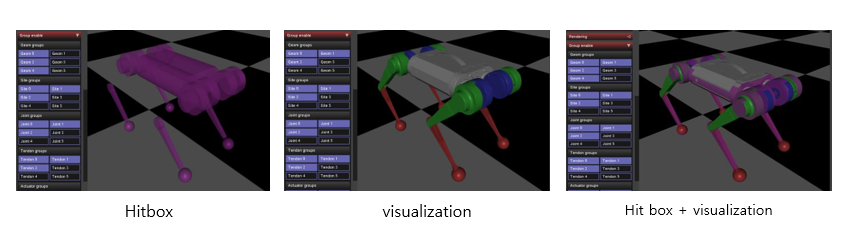
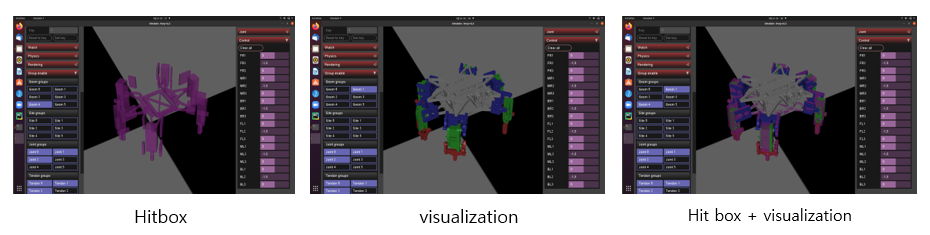
using basic shape (Box, cylinder, sphere..)
you can see the code for specific MDP setting(S,A,R..) info

you can see the code for specific MDP setting(S,A,R..) info
