Installation : GYM, MUJOCO, Stable-Baselines3 + (Linux)
- Move to :
YOUR_PATH/python3.X/site-packages/gym/
- Clone this repository in
YOUR_PATH/python3.X/site-packages/gym/envs/
- Move [train_test_] directory to :
YOUR_PATH/python3.X/site-packages/gym/
- Train/Test
cd YOUR_PATH/python3.X/site-packages/gym/train_test_
(Training v1) python PPO_train.py
(Training v2) python PPO_train_custum-v3.py
(Test) python PPO_check.py
Our main Our fundamental goal is to control the robot in simulation using a vision-based RL algorithm.
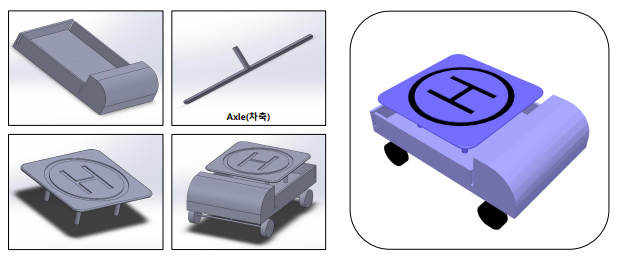
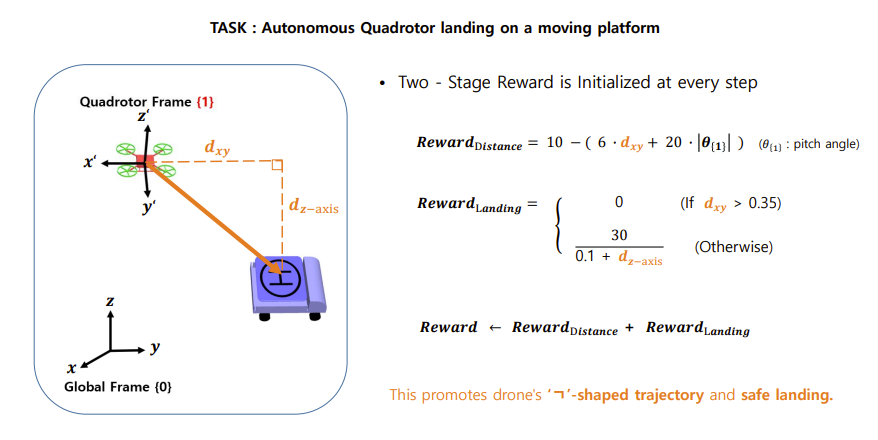
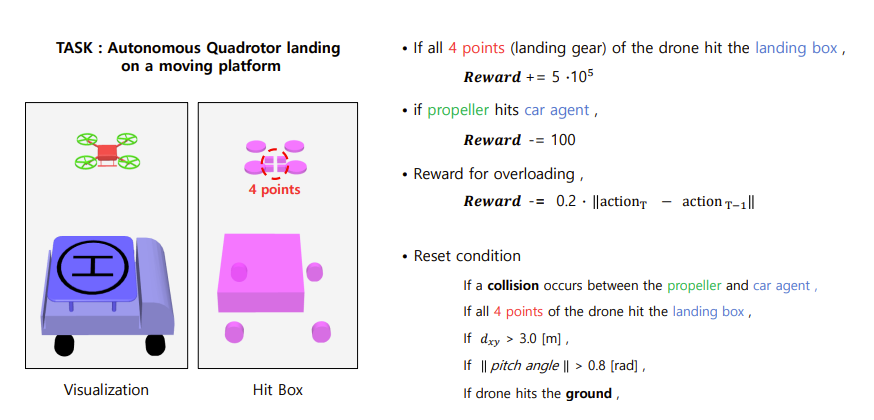
TASK : Autonomous Quadrotor landing on a moving platform

Control Input(=Neural network output) and Constraints

Design Tool : Solidworks (+ SWtoURDF)
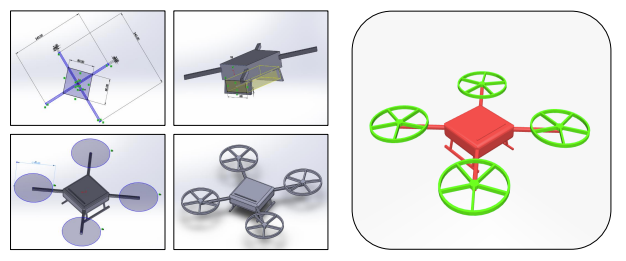

For mounting Camera on Robot Model, you can see the file in gym/mujoco/assets/Drone_ver_1.0/assets
To get RGB data from camera for observation, you can see the file in gym/mujoco/drone_v2.py
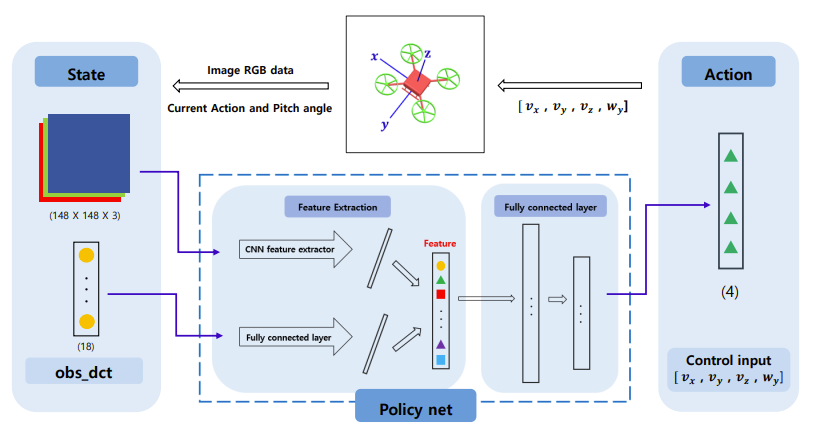
• Input : Image RGB data + Current Action and Pitch angle [Vx, Vy, Vz, Pitch angle]
• Output : Vx, Vy, Vz, Wy
• RL algorithm : PPO
you can see the code for specific MDP setting(S,A,R..) info
YOUR_PATH/python3.X/site-packages/gym/envs/mujoco/
drone_v1.py : Simplified vector verification
drone_v2.py : TASK
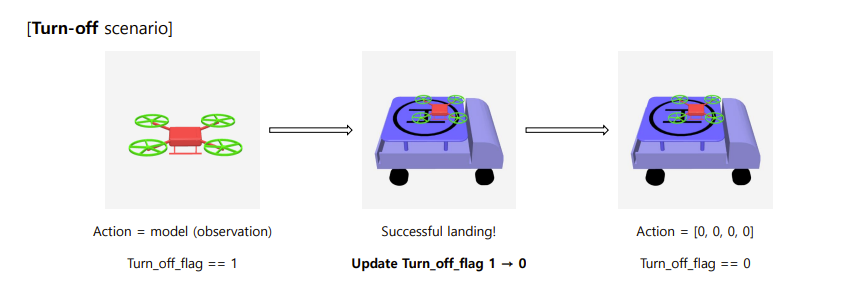
If the drone's four points touch the landing box, the propeller no longer needs to rotate
- So, Let’s set all control inputs to zero. (= Turn off)
- This algorithm is implemented using the Turn-off flag.
Video : YOUTUBE link
You can watch video through the link above.