X-StereoLab is an open source stereo matching and stereo 3D object detection toolbox based on PyTorch.
- GOOGLE HITNET model pytorch training code is released.

- GOOGLE HITNET model pytorch KITTI2015 submission: http://www.cvlibs.net/datasets/kitti/eval_scene_flow_detail.php?benchmark=stereo&result=226494ba5559e9f5f46bdbd681d1564fee78409e ranking 145 with 80GMAC
All the codes are tested in the following environment:
- Ubuntu 16.04
- Python 3.7
- PyTorch 1.1.0 or 1.2.0 or 1.3.0
- Torchvision 0.2.2 or 0.4.1
(1) Clone this repository.
git clone git@github.com:meteorshowers/X-StereoLab.git && cd X-StereoLab
(2) Setup Python environment.
conda activate -n xstereolab
pip install -r requirements.txt --user
## conda deactivate xstereolab
(1) Please download the KITTI dataset.
ln -s /path/to/KITTI_DATA_PATH ./data/kitti/
ln -s /path/to/OUTPUT_PATH ./outputs/
The training scripts support multi-processing distributed training, which is much faster than the typical PyTorch DataParallel interface.
python3 tools/train_net_disp.py --cfg ./configs/config_xxx.py --savemodel ./outputs/MODEL_NAME -btrain 4 -d 0-3 --multiprocessing-distributed
The training models, configuration and logs will be saved in the model folder.
To load some pretrained model, you can run
python3 tools/train_net_disp.py --cfg xxx/config.py --loadmodel ./outputs/MODEL_NAMEx --start_epoch xxx --savemodel ./outputs/MODEL_NAME -btrain 4 -d 0-3 --multiprocessing-distributed
If you want to continue training from some epochs, just set the cfg, loadmodel and start_epoch to the respective model path.
Besides, you can start a tensorboard session by
tensorboard --logdir=./outputs/MODEL_NAME/tensorboard --port=6666
and visualize your training process by accessing https://localhost:6666 on your browser.
on working ...
</tbody>
| Methods | Epochs | Train Mem (GB/Img) | Test Mem (GB/Img) | EPE | D1-all | Models |
|---|---|---|---|---|---|---|
| HITNET (kitti) | 4200 | 2.43% | GoogleDrive | |||
| HITNET (sceneflow) | 200 | 0.65 | GoogleDrive | |||
| stereonet (sceneflow) | 20 | 1.10 | GoogleDrive | |||
| ActiveStereoNet | 10 | GoogleDrive | ||||
| SOS |
on working...
| Methods | Epochs | Train Mem (GB/Img) | Test Mem (GB/Img) | 3D AP | BEV AP | 2D AP | Models |
|---|---|---|---|---|---|---|---|
| PLUME | GoogleDrive |
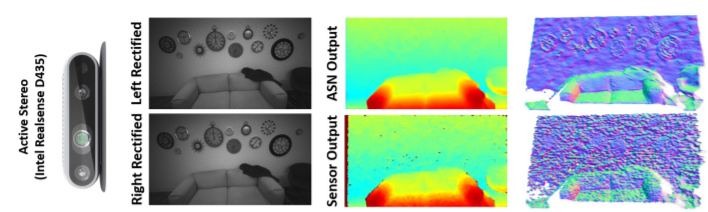
We provide a video demo for showing the result of X-StereoLab. Here we show the predicted disparity map of activastereonet.
- Multiprocessing GPU training
- TensorboardX
- Reduce training GPU memory usage
- eval and test code
- Result visualization
- Still in progress
If you find our work useful in your research, please consider citing:
* refercence[1]
@article{tankovich2020hitnet,
title={HITNet: Hierarchical Iterative Tile Refinement Network for Real-time Stereo Matching},
author={Tankovich, Vladimir and H{\"a}ne, Christian and Fanello, Sean and Zhang, Yinda and Izadi, Shahram and Bouaziz, Sofien},
journal={arXiv preprint arXiv:2007.12140},
year={2020}
}
* refercence[2]
@inproceedings{tankovich2018sos,
title={Sos: Stereo matching in o (1) with slanted support windows},
author={Tankovich, Vladimir and Schoenberg, Michael and Fanello, Sean Ryan and Kowdle, Adarsh and Rhemann, Christoph and Dzitsiuk, Maksym and Schmidt, Mirko and Valentin, Julien and Izadi, Shahram},
booktitle={2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={6782--6789},
year={2018},
organization={IEEE}
}
 vtankovich |
- Thanks to vtankovich
- Thanks to SamehKhamis
If you have any questions or suggestions about this repo, please feel free to contact me (xuanyili.edu@gmail.com). Wechat:
 XUANYILI |