![]()
![]()
This is the Pi In The Sky (pits) device-side software.
To install the device software directly from GitHub, or build against it:
pip3 install pinthesky
You can also use the guided install from your work station to remotely configure a RPi via ssh. Some pre-requisites are:
- Need to be able to
sudoif selected to assume root - Make your life easier with
ssh-copy-id user@ipfor pub key auth - Have the
awsCLI on your workstation with permission to create things, roles, S3 buckets, and policies - Run
shlocally to enter the guide:
mkdir -p $HOME/bin \
&& wget -O $HOME/bin/pitsctl https://raw.githubusercontent.com/philcali/pits-device/main/service/mainv2.sh \
&& chmod +x $HOME/bin/pitsctl \
&& pitsctl -h
The current pinthesky application is still using the legacy camera module and is only compatible with:
- raspbian OS < 12 (bookworm)
- ArduCam 1.1 and 1.2 (< 1.3)
Until #46 is fixed, you must stick to the legacy OS and camera modules.
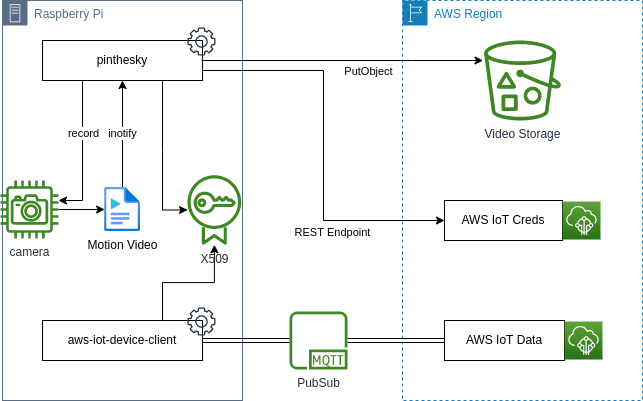
The pinthesky daemon is very light-weight. The entirety of the application runs on 3 threads (optionally 4 with cloudwatch):
- Single thread to manage the camera
- Single thread to poll an event queue
- Single thread to poll inotify
- (Optional) Single thread to upload logs to CloudWatch
The camera thread detects motion vectors in the recording. The buffer is flushed and an event is
signaled to combine the buffered video with the live stream. The h264 file triggers an event
to begin an upload to S3, if S3 was configured. The following camera configuration flags exists:
--combine-dir COMBINE_DIR
the directory to combine video, defaults to
motion_videos
--rotation ROTATION rotate the video, valid arguments [0, 90, 180, 270]
--resolution RESOLUTION
camera resolution, defaults 640x480
--framerate FRAMERATE
framerate of the camera, defaults to 20
--buffer BUFFER buffer size in seconds, defaults to 15
--sensitivity SENSITIVITY
sensitivity of the motion detection math, default 10
Where does inotify come into play? An optional integration with
aws-iot-device-client exists to handle the MQTT related connections to AWS IoT. Through
the aws-iot-device-client, the pinthesky can read MQTT published messages from a file. These
events will populate the internal event queue. This is useful for manually triggering a video upload.
The aws-iot-device-client can also listen to AWS IoT Shadow Document updates. These updates
are written to a file which pinthesky can read to reconfigure the camera (buffer, framerate, etc).
The follow configuration is used to poll inotify for changes:
--event-input EVENT_INPUT
file representing external input, default input.json
--event-output EVENT_OUTPUT
file representing external output, default output.json
--configure-input CONFIGURE_INPUT
file for configuration input, default config-
input.json
--configure-output CONFIGURE_OUTPUT
file for configuration output, default config-
output.json
The integration with AWS is entirely optional through AWS IoT device configuration. Running the daemon with the following commands allow the device to exchange temporary AWS V4 credentials with a X509 certificate:
--thing-name THING_NAME
the AWS IoT ThingName for use in upload
--thing-cert THING_CERT
the AWS IoT certificate associated to the Thing
--thing-key THING_KEY
the AWS IoT certificate pair associated to the Thing
--ca-cert CA_CERT the root CA certificate to authenticate the
certificate
--credentials-endpoint CREDENTIALS_ENDPOINT
the AWS IoT Credentials Provider endpoint
--role-alias ROLE_ALIAS
the AWS IoT Role Alias to pull credentials
Once credentials are obtained, the pinthesky daemon will attempt to upload to an S3 bucket
location. These values are configured with:
--bucket-name BUCKET_NAME
the S3 bucket to upload motion detection files
--bucket-prefix BUCKET_PREFIX
the prefix to upload the motion files to, default
motion_videos
An entirely optional integration exists with CloudWatch, where device
logs and metrics are uploaded to a desired LogGroup. The integration
works in conjuction with a connection to AWS. By turning on the
integration with --cloudwatch specify the LogGroup with:
--cloudwatch-log-group <GroupName>. It will, by default, flush
logs to CloudWatch serially. To background buffer these entries, use
the --cloudwatch-thread which reserves a thread for flushing the
log events. By default, the application will use logs for
--cloudwatch-event-type which matches how logs are normally written
for the daemon. To enable EMF style metrics, use
--cloudwatch-event-type emf. The daemon will manage the LogStream
associated to the LogGroup, by "{year}/{month}/{day}". It will
delineate the stream by thing_name. To disable this behavior, use
--disable-cloudwatch-stream-split.
--cloudwatch enable the cloudwatch upload, default false
--cloudwatch-region CLOUDWATCH_REGION
the AWS region name override for CloudWatch
--cloudwatch-thread enable cloudwatch logs to upload in background, default false
--cloudwatch-event-type CLOUDWATCH_EVENT_TYPE
event type to upload: logs,emf,all
--cloudwatch-metric-namespace CLOUDWATCH_METRIC_NAMESPACE
metric namespace when using emf event type, default Pits/Device
--cloudwatch-log-group CLOUDWATCH_LOG_GROUP
uploads to this cloudwatch log group
--disable-cloudwatch-stream-split
disables splitting the log stream by thing name
Note: These can be configured correctly for you if you follow the guided pitsctl installation
wizard.
The pitsctl entry point can handle three targets:
install: Installs or updates software and agents for running the camera controlremove: Removes all configuration, cloud resources, software and agentsview: Inpects the installation on the device
Usage: pitsctl - v0.8.2: Install or manage pinthesky software
-h,--help: Prints out this help message
-m,--host: Client machine connection details
-t,--text: Enable a no color, text only view of the application
-r,--root: Assume root permission for management
-l,--level: Changes the logging verbosity for pitsctl
-v,--version: Prints the version and exists
The pits-infra package can be used to deploy a complete and working AWS cloud infrastructure to support the device configuration and integration. The infrastructure contains the following:
- Storage configuration
- Policy and device authorization
- Control Plane deployment
- Console deployment
- Console authorization through Cognito
Follow the re-use section in the README to deploy it for at no charge or 50 cents a month if a custom domain is included.
Adjusting the bitrate, buffer, resolution, framerate, etc... It's a lot to take in.
The default values work, but you will find the buffer doesn't quite mesh with a zero.
- resolution=640x480
- framerate=20
- bitrate=17000000 (17Mbps)
- profile=high
- level=4
For a first gen PiZero, these settings might be too high. I've seen success with
- resolution=640x480
- framerate=15
- bitrate=5000000 (5Mbps)
- profile=high
- level=2.2
This reduces the file size by 60% and aligns buffering to clock time a little more accurately.