NOTE: SDK v8.0+ is required to use this
NOTE: an OpenRC-based SDK is NOT required to use this
Finally, a straightforward and easy way to use OpenCV on an FTC robot! With this library, you can go from a stock SDK to running a sample OpenCV OpMode, with either an internal or external camera, in just a few minutes!
Features at a glance:
- Supports concurrent streaming from:
- An internal camera and a webcam
- Two webcams
- Two internal cameras (select devices; internal cameras must not share the same bus)
- Supports Driver Station camera preview feature introduced in SDK v5.1
- Supports tapping on the viewport to cycle through the various stages of a pipeline (see PipelineStageSwitchingExample)
- Supports using webcams directly with OpenCV instead of going through a Vuforia instance
- Supports changing pipelines on-the-fly (while a streaming session is in flight)
- Supports dynamically pausing/resuming live viewport to save battery and CPU time
- Support for rotating stream based on physical camera orientation (e.g. use a webcam in portrait without having to mess with rotation yourself)
- Loads 10MB native library for OpenCV from internal storage to prevent bloating the APK
Unfortunately, due to a known bug with OpenCV 4.x, EasyOpenCV is only compatible with devices that run Android 5.0 or higher. For FTC, this means that it is incompatible with the ZTE Speed. EasyOpenCV will work fine on all other FTC-legal devices (including the new Control Hub).
IMPORTANT NOTE: EasyOpenCV delivers RGBA frames, but desktop OpenCV (what you may be used to) delivers BGR frames. Beware when porting code between the two!
- Go to the Releases page, find the latest release, and download the OBJ AAR bundle file from the assets section
- In the OnBotJava console, click the Upload Files button (to the left of the trash can), select the
.aarfile you just downloaded, and wait while OnBotJava processes the library - Congrats, you're ready to go! Now check out the example OpModes and other documentation in the Documentation Section.
IMPORTANT NOTE: These instructions assume you are starting with a clean SDK project. This library includes the OpenCV Android SDK, so if you have already installed OpenCV in your project through the traditional means, you will need to remove it first. Otherwise, you will get a compiler error that multiple files define the same class.
IMPORTANT NOTE #2: Do NOT locally clone and/or import this project unless you want to develop this library itself! If you're just a normal user, follow the below instructions verbatim.
-
Open your FTC SDK Android Studio project
-
Add maven repository containing required libraries.
-
Open the
build.dependencies.gradlein the root of the project: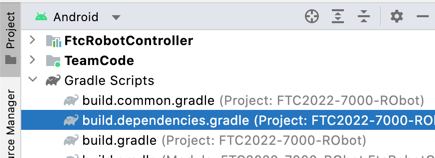
-
Add a local maven repository at the end of the repositories block.
maven { url = 'https://nowireless.github.io/maven/' }Before:
repositories { mavenCentral() google() // Needed for androidx maven { url = 'https://maven.brott.dev/' } flatDir { dirs rootProject.file('libs') } }After:
repositories { mavenCentral() google() // Needed for androidx maven { url = 'https://maven.brott.dev/' } maven { url = 'https://nowireless.github.io/maven/' } flatDir { dirs rootProject.file('libs') } }
-
-
Open the
build.gradlefile for the TeamCode module: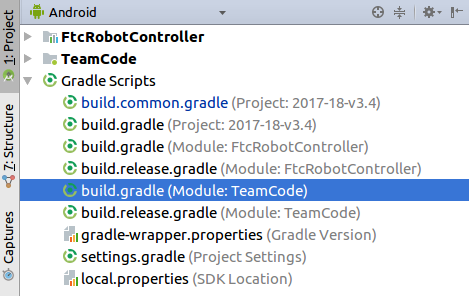
-
At the bottom, add this:
dependencies { implementation 'org.nowireless:easyopencv:1.5.2-contrib' }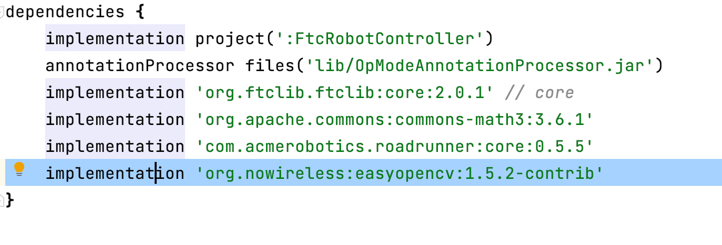
-
Open the
build.common.gradlefile, scroll down until you find this part: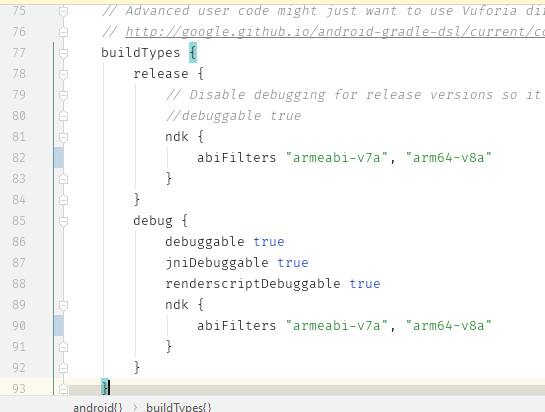
-
Remove both references to
"arm64-v8a"described in debug and release blocks, leaving"armeabi-v7a"untouched: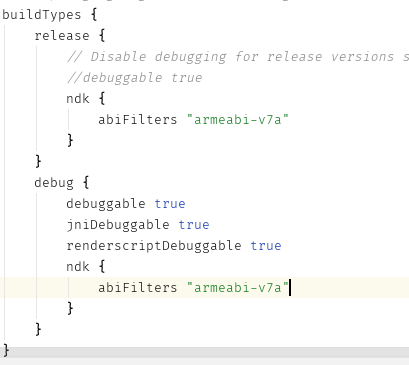





*If you already had "arm64-v8a" removed, no further changes are needed
**This step is needed because the OpenCV native library is compiled for 32-bit, and Android applications cannot load both 32-bit and 64-bit libraries at the same time. Otherwise, a warning will be shown when opening the app, indicating that OpenCV-enabled OpModes will crash.
-
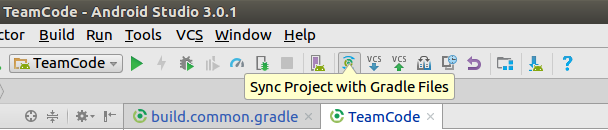
Now perform a Gradle Sync:
-
Because EasyOpenCv depends on OpenCV-Repackaged, you will also need to copy
libopencv_java455_contrib.sofrom the/doc/native_libsfolder of that repo into theFIRSTfolder on the USB storage of the Robot Controller (i.e. connect the Robot Controller to your computer with a USB cable, put it into MTP mode, browse the contents of the file system, and drag 'n drop the file into the "FIRST" folder at the top level of the filesystem). Note that Control Hubs default to MTP mode and thus should be recognized immediately upon plugging it in. For Mac, you will either need to use the Android File Transfer program, or you can use the built-in file explorer side pane in Android Studio. -
Congrats, you're ready to go! Now check out the example OpModes and other documentation in the Documentation Section.

- Switch to use forked version of OpenCV-Repackaged by @nowireless that includes the OpenCV contrib modules.
- Fixes compatibility with SDK v8.0. You MUST use v1.5.2 (or later) for SDK 8.0. Previous versions Will not work!! Backwards compatibility is NOT maintained for this release unfortunately!
- Fixes possible leak of framebuffer when viewport render thread was restarted
- Fixes crash with SDK v7.0 when memory leak warning was generated
- Fixes compatibility with SDK v7.0
- You MUST use 1.5.0 (or later) for SDK 7.0. Previous versions Will not work!!
- Backwards compatibility with SDK v6.1 is maintained.
- First release supporting OnBotJava! (See setup instructions)
- API CHANGE: OpenCV core upgraded to OpenCV v4.5.3 (transitive dependency on
opencv-repackagedupdated to4.5.3-B)- This change also requires an updated native library to be copied to the device (see installation instructions above)
- Failure to open the camera device is now properly handled (previously, the
onOpened()callback would be called even in the case of failure)- API CHANGE: User-defined
AsyncCameraOpenListenerinstances must now also implement thevoid onError(int errorCode)function
- API CHANGE: User-defined
- Change webcam opening timeout to be user-configurable (new function
void setMillisecondsPermissionTimeout(int ms)added) - Fix race condition when closing camera which could cause the camera worker thread to crash with a null pointer when trying to send a frame to the viewport
- Fix issue with viewport where user-drawn parts of the image (e.g. rect boxes) would not appear in the correct color unless an alpha parameter for the color was specified
- Fix bug where Camera2 backend was broken on some devices due to reading the image timestamp after closing the Image object
- Samples moved to
org.firstinspires.ftc.teamcodepackage
- Add support for Vuforia passthrough mode, which allows running Vuforia and OpenCV simultaneously on the same camera. Please see OpenCvAndVuforiaOnSameCameraExample.
- IMPORTANT NOTE: SDK v6.1 or higher is now required!
- Add support for additional webcam controls introduced in SDK v6.1
- Add
saveMatToDiskFullPath()method to pipeline class - Add
TimestampedOpenCvPipelineclass which extendsOpenCvPipelineand delivers capture time timestamps along with frames. See newTimestampedPipelineExamplefile.
- Add ability to set FocusMode to Internal camera v1 API
- General improvements to Internal camera v2 API
- Make startStreaming() check to make sure camera is opened
- Make startStreaming() check to make sure requested resolution is supported
- Fix potential failure to release mutex
- Cleaned up the conversion of raw camera data into the Mat by using some native C++ code
- Viewport improvements
- Image is now centered inside the SurfaceView
- Unused space of the surface view is set to the same color as the activity background color
- Added optional GPU-accelerated rendering mode for viewport
- Warn instead of throwing when setting viewport rendering policy for webcams
- Optimized webcam frame delivery by using some native C++ code to avoid unnecessary hidden
memcpyoperations - Add API for recording pipelines to a video file
- This is a BETA API and may be unstable, and subject to change! Caveat emptor.
- Fix memory leak detector to trip only after settle delay, instead of only before settle delay.
- Transitive dependency on OpenCV-Repackged updated to 4.1.0-C, which specifically handles error case of failure to load 32-bit library when FTC Robot Controller app has already loaded another native library as 64-bit
- Fixes issue which prevented webcams from initializing in v1.4.0 which was found in prerelease testing, fixed, and yet somehow didn't make it into git...
- Adds support for Android Camera2 API
- New
OpenCvInternalCamera2interface. Camera2 instances can be obtained fromOpenCvCameraFactory, just like other types - Supports manual control over sensor parameters:
- ISO (gain)
- Exposure
- Focus
- White balance
- Frame interval (FPS)
- New
- Make
OpenCvCamerainterface extendCameraStreamSourceso that casting to implementation objects isn't required to use a camera as a stream source for something other than the DS - Adds
setViewportRenderingPolicy()API toOpenCvCamera interface, provides option to:MAXIMIZE_EFFICIENCYKeep viewport behavior as it always has been, OROPTIMIZE_VIEWAt the expense of CPU time (and viewport smoothness), automatically orient preview image such that it's not constantly 90 degrees out from expected with an internal camera when the physical device orientation does not match the streaming orientation
- Add memory leak detector for pipelines
- Not 100% accurate but, seems to be fairly effective
- Has a crude garbage collector run detector
- Can be enabled/disabled or have parameters tweaked by modifying superclass variables from your pipeline constructor
- Add
init(Mat m)method to pipeline class, which will be called with the first frame from the camera, allowing you to initialize submats and the like for your pipeline - Adds pipeline utility function for saving Mats to disk.
- Save function clones input mat and writes to disk asynchronously to prevent stalling pipeline
- Up to 5 save operations can be running simultaneously; once this limit is reached, the pipeline will be stalled until one has completed
- Adds APIs for closing and opening the camera asynchronously. This is now the recommended way to open and close, as it can help to prevent
stuckInXYZ()issues and the like. Please consult theOpenCvCamerainterface javadoc for details - Adds support for switchable webcams
- New
OpenCvSwitchableWebcaminterface. Instances can be obtained fromOpenCvCameraFactory, just like other types
- New
- Fix deadlock when closing webcams
- Increase webcam open timeout to 2 seconds. This increases compatibility with random nobrand cameras.
- Adds new
OpenCvWebcaminterface which exposes some additional functionality for webcams- Instances can be obtained from
OpenCvCameraFactory, just like other types - Support for exposure control & focus control, using the SDK UVC driver's built-in interfaces
- Instances can be obtained from
- Adds new samples demonstrating some of the new functionality
- Library version now printed to logcat when creating camera instance
- Misc. bug fixes
- Resolutions >480p are now possible with webcams (at reduced framerates)
- Add exposure compensation and autoexposure lock APIs for internal camera
- Fix blank display when user pipeline returned cropped mat of type CV_8UC1 (e.g. masks)
- Print supported resolutions when user selects illegal resolution for camera
- Transitive dependency on OpenCV-Repackged updated to 4.1.0-B, which drastically improves error handling when loading native library
- Add official support for multiple concurrent camera streams (was possible before but required manual activity UI modifications)
- Also allows for running Vuforia alongside EasyOpenCV
- Add "TrackerAPI" classes (ability to run multiple OpenCV algorithms in the same pipeline, and switch between which output is rendered to the screen in realtime by tapping the viewport)
- Add support for rendering cropped returns from user pipeline
- A little internal code cleanup
- Optimise viewport to re-use existing framebuffer memory
- Fix issue where if a user pipeline created a submat from the input Mat, the submat would be de-linked from the input buffer on the next frame
- Added ability to use some advanced features for internal cameras:
- Added ability to set "recording hint"
- Added ability to set "hardware frame timing range"
- Added ability to control zoom
- Added ability to control flashlight
- Added support for using double buffering (default; can improve FPS)
- API change: camera instances are now created by invoking
OpenCvCameraFactory.getInstance().create... - Add examples:
- InternalCameraAdvancedFeaturesExample
- MultipleCameraExample
- MultipleCameraExampleOpenCvAlongsideVuforia
- TrackerApiExample
- HOTFIX: implement workaround for SDK bug of RenderScript failing to initialize on some devices which prevented the webcam frames from being forwarded through the JNI to the Java side (See issue #1)
- SDK v5.1 or higher now required
- Add support for stream preview on Driver Station
- Fix bug where internal camera was not correctly released
- Fix bug where a null pipeline caused a crash
- API change: user pipelines now need to
extends OpenCvPipelineinstead ofimplements OpenCvPipeline - Add ability for user pipeline to override
onViewportTapped()to be notified if the user taps the viewport - Add
PipelineStageSwitchingExampleto show how to useonViewportTapped()to change which stage of your pipeline is drawn to the viewport for debugging purposes. It also shows how to get data from your pipeline to your OpMode.
- Initial release