The Official PyTorch implementation of "Learning Multi-View Interactional Skeleton Graph for Action Recognition" [IEEEXplore] in TPAMI 2020. The arXiv version of our paper is coming soon.
- Current Status
- Overview and Advantages
- Requirements
- Installation
- Data Preparation
- Training
- Evaluation
- Results
- Citation
- Acknowledgement
- NTU-RGB+D
- Data Preparation
- Models
- SPGNet
- HPGNet
- MV-HPGNet
- NTU-RGB+D 120
-
Lighter Network with Higher Accuracy
- Smaller Model
- You only need
2.5 Mto save our model
- You only need
- Faster Inference (on
single NVidia 2080 Ti)8 sinference time on Cross-View validation set of NTU-RGB+D1min 20straining time per epoch on Cross-View training set of NTU-RGB+D
- Higher Accuracy
- Please refer to the Results
- Smaller Model
-
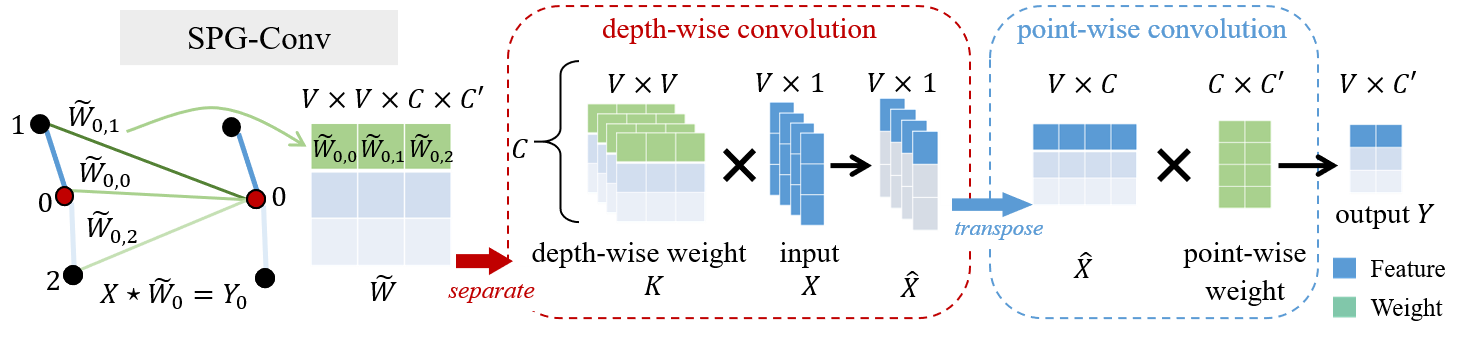
Efficient Unit: SPGConv for Richer Context Modeling
- The key code of SPGConv
# set graph dw_gcn_weight = self.dw_gcn_weight.mul(self.A) # depth-wise conv x = torch.einsum('nctv,cvw->nctw', (x, dw_gcn_weight)) # point-wise conv x = torch.einsum('nctw,cd->ndtw', (x, self.pw_gcn_weight))
- Illustration
- The key code of SPGConv
-
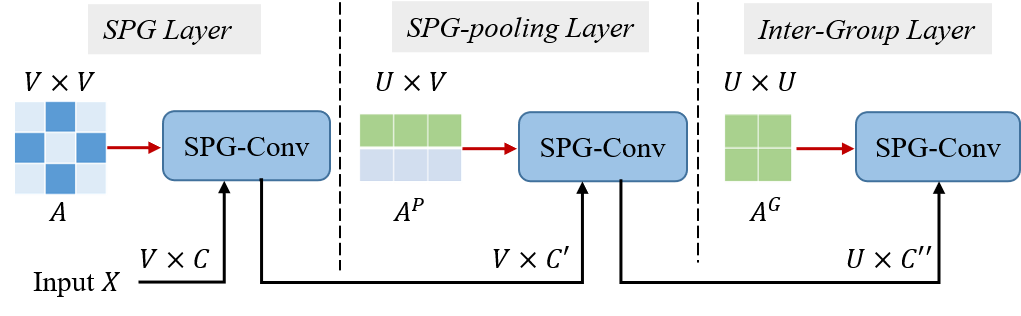
Unified Framework: Easy to Implement


We only test our code on the following environment:
- Python == 3.7
- PyTorch == 1.2.0 (Our code runs slow when PyTorch >=1.4.0)
- CUDA == 10.0 or 10.1
# Install python environment
$ conda create -n mvignet python=3.7
$ conda activate mvignet
# Install Pytorch 1.2.0 with CUDA 10.0 or 10.1
$ pip install torch==1.2.0 torchvision==0.4.0
# Download our code
$ git clone https://github.com/niais/mv-ignet
$ cd mv-ignet
# Install torchlight
$ cd torchlight; python setup.py install; cd ..
# Install other python libraries
$ pip install -r requirements.txt-
NTU RGB+D: only the 3D skeleton (5.8GB) modality is required in our experiments. You can put the raw data in the directory
<path to nturgbd+d_skeletons>and build the database as:# generate raw database $ python tools/ntu_gendata.py --data_path <path to nturgbd+d_skeletons> # process the above raw data for our method $ python feeder/preprocess_ntu.py
-
Example for training MV-HPGNet on
ntu-xview. You can train other models by using.yamlfiles atconfig/folder.# train hpgnet with physical graph $ python main.py rec_stream --config config/mv-ignet/ntu-xview/train_hpgnet_simple.yaml --device 0 1 # train hpgnet with complement graph $ python main.py rec_stream --config config/mv-ignet/ntu-xview/train_hpgnet-complement_simple.yaml --device 2 3
-
About multi-view training: you need train two models as above, with a skeleton graph and its complement graph respectively. We save the complement graph in
complement_graph_1.npzfor convenient and you can compute it yourself:- how to use
complement_graph_1.npz:import numpy as np saved_graph = np.load('complement_graph_1.npz') # 'cA' is the adjacent matrix and 'norm_cA' is its normalization cA, norm_cA = saved_graph['a'], saved_graph['na']
- how to compute it yourself:
# given the adjacent matrix A, its complement cA can be computed by: cA = 1.0 - A
- how to use
-
Trained Models: we have put our checkpoints on NTU-RGB+D dataset at
weights/folder:# checkpoints on NTU-RGB+D dataset weights ├── xsub │ ├── xsub_HPGNet_epoch120_model.pt │ └── xsub_HPGNet-complement_epoch120_model.pt └── xview ├── xview_HPGNet_epoch120_model.pt └── xview_HPGNet-complement_epoch120_model.pt
- Example for
single modelevaluation (HPGNet model):# evaluate hpgnet model with physical graph $ python main.py rec_stream --phase test --config config/mv-ignet/ntu-xview/train_hpgnet_simple.yaml --weights <path to weights> # evaluate hpgnet model with complement graph $ python main.py rec_stream --phase test --config config/mv-ignet/ntu-xview/train_hpgnet-complement_simple.yaml --weights <path to weights>
- Example for
multi modelevaluation (MV-HPGNet model):Note that before evaluating# we provide 'eval_ensemble.sh' file to do this simply $ python main.py rec_ensemble \ --config config/mv-ignet/ntu-xview/test_hpgnet_ensemble_simple.yaml \ --weights <path to model-1 weights> \ --weights2 <path to model-2 weights>
multi-view model, you must have trained two models with the skeleton graph and its complement graph respectively in Training.
The expected Top-1 accuracy results on NTU-RGB+D 60 dataset are shown here:
| Model | Cross View (%) | Cross Subject (%) |
|---|---|---|
| ST-GCN | 88.8 | 81.6 |
| SPGNet | 94.3 | 86.8 |
| HPGNet | 94.7 | 87.2 |
| MV-HPGNet | 95.8 | 88.6 |
Please cite our paper if you find this repo useful in your resesarch:
@article{wang2020learning,
title={Learning Multi-View Interactional Skeleton Graph for Action Recognition},
author={Wang, Minsi and Ni, Bingbing and Yang, Xiaokang},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2020},
publisher={IEEE}
}The framework of current code is based on the old version of ST-GCN (Its new version is MMSkeleton).