This is the official source code for PVN3D: A Deep Point-wise 3D Keypoints Voting Network for 6DoF Pose Estimation, CVPR 2020. (PDF, Video_bilibili, Video_youtube).

- We've released the source code of our CVPR2021 oral work, FFB6D in this repo, which is faster and more accurate for 6D pose estimation! FFB6D introduce a general framework for representation learning from a single RGBD image, and we cascade prediction headers of PVN3D for 6D pose estimation.
- We optimized and applied PVN3D to a robotic manipulation contest OCRTOC (IROS 2020: Open Cloud Robot Table Organization Challenge) and got 2nd place! The model was trained on synthesis data generated from rendering engine and only a few frames (about 100 frames) of real data but generalize to real scenes during inference, revealing its capability of cross-domain generalization.
- The following setting is for pytorch 1.0.1. For pytorch 1.5 & cuda 10, switch to branch pytorch-1.5.
- Install CUDA9.0
- Set up python environment from requirement.txt:
pip3 install -r requirement.txt
- Install tkinter through
sudo apt install python3-tk - Install python-pcl.
- Install PointNet++ (refer from Pointnet2_PyTorch):
python3 setup.py build_ext
-
LineMOD: Download the preprocessed LineMOD dataset from here (refer from DenseFusion). Unzip it and link the unzipped
Linemod_preprocessed/topvn3d/datasets/linemod/Linemod_preprocessed:ln -s path_to_unzipped_Linemod_preprocessed pvn3d/dataset/linemod/
-
YCB-Video: Download the YCB-Video Dataset from PoseCNN. Unzip it and link the unzipped
YCB_Video_Datasettopvn3d/datasets/ycb/YCB_Video_Dataset:ln -s path_to_unzipped_YCB_Video_Dataset pvn3d/datasets/ycb/
- First, generate synthesis data for each object using scripts from raster triangle.
- Train the model for the target object. Take object ape for example:
The trained checkpoints are stored in
cd pvn3d python3 -m train.train_linemod_pvn3d --cls apetrain_log/linemod/checkpoints/{cls}/,train_log/linemod/checkpoints/ape/in this example.
- Start evaluation by:
You can evaluate different checkpoint by revising
# commands in eval_linemod.sh cls='ape' tst_mdl=train_log/linemod/checkpoints/${cls}/${cls}_pvn3d_best.pth.tar python3 -m train.train_linemod_pvn3d -checkpoint $tst_mdl -eval_net --test --cls $cls
tst_mdlto the path of your target model. - We provide our pre-trained models for each object at onedrive link, baiduyun link (access code(提取码): 8kmp). Download them and move them to their according folders. For example, move the
ape_pvn3d_best.pth.tartotrain_log/linemod/checkpoints/ape/. Then revisetst_mdl=train_log/linemod/checkpoints/ape/ape_pvn3d_best.path.tarfor testing.
- After training your models or downloading the pre-trained models, you can start the demo by:
The visualization results will be stored in
# commands in demo_linemod.sh cls='ape' tst_mdl=train_log/linemod/checkpoints/${cls}/${cls}_pvn3d_best.pth.tar python3 -m demo -dataset linemod -checkpoint $tst_mdl -cls $cls
train_log/linemod/eval_results/{cls}/pose_vis
- Preprocess the validation set to speed up training:
cd pvn3d python3 -m datasets.ycb.preprocess_testset - Start training on the YCB-Video Dataset by:
The trained model checkpoints are stored in
python3 -m train.train_ycb_pvn3d
train_log/ycb/checkpoints/
- Start evaluating by:
You can evaluate different checkpoint by revising the
# commands in eval_ycb.sh tst_mdl=train_log/ycb/checkpoints/pvn3d_best.pth.tar python3 -m train.train_ycb_pvn3d -checkpoint $tst_mdl -eval_net --test
tst_mdlto the path of your target model. - We provide our pre-trained models at onedrive link, baiduyun link (access code(提取码): h2i5). Download the ycb pre-trained model, move it to
train_log/ycb/checkpoints/and modifytst_mdlfor testing.
- After training your model or downloading the pre-trained model, you can start the demo by:
The visualization results will be stored in
# commands in demo_ycb.sh tst_mdl=train_log/ycb/checkpoints/pvn3d_best.pth.tar python3 -m demo -checkpoint $tst_mdl -dataset ycb
train_log/ycb/eval_results/pose_vis
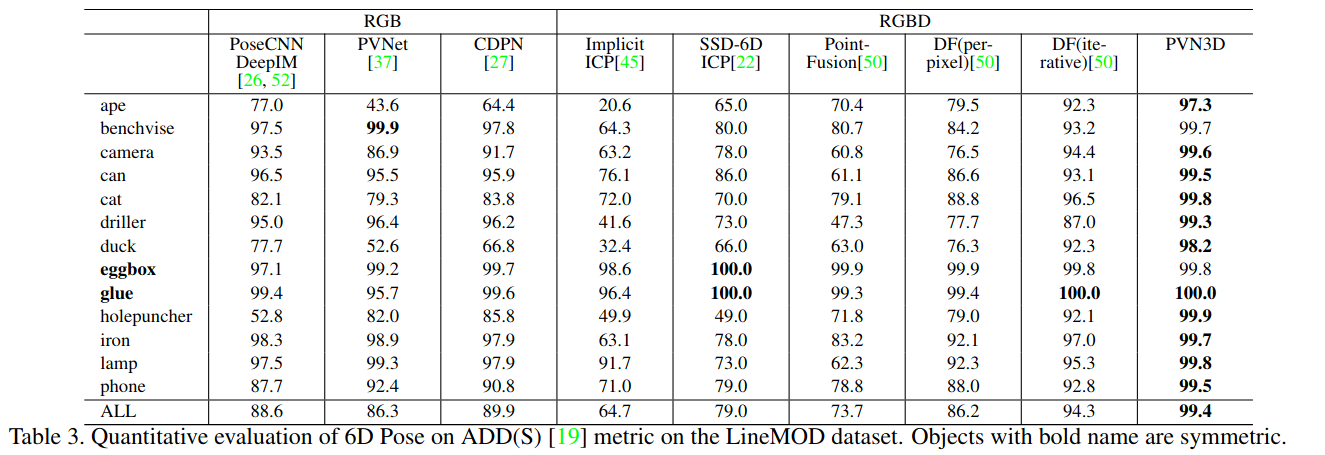
- Evaluation result on the LineMOD dataset:
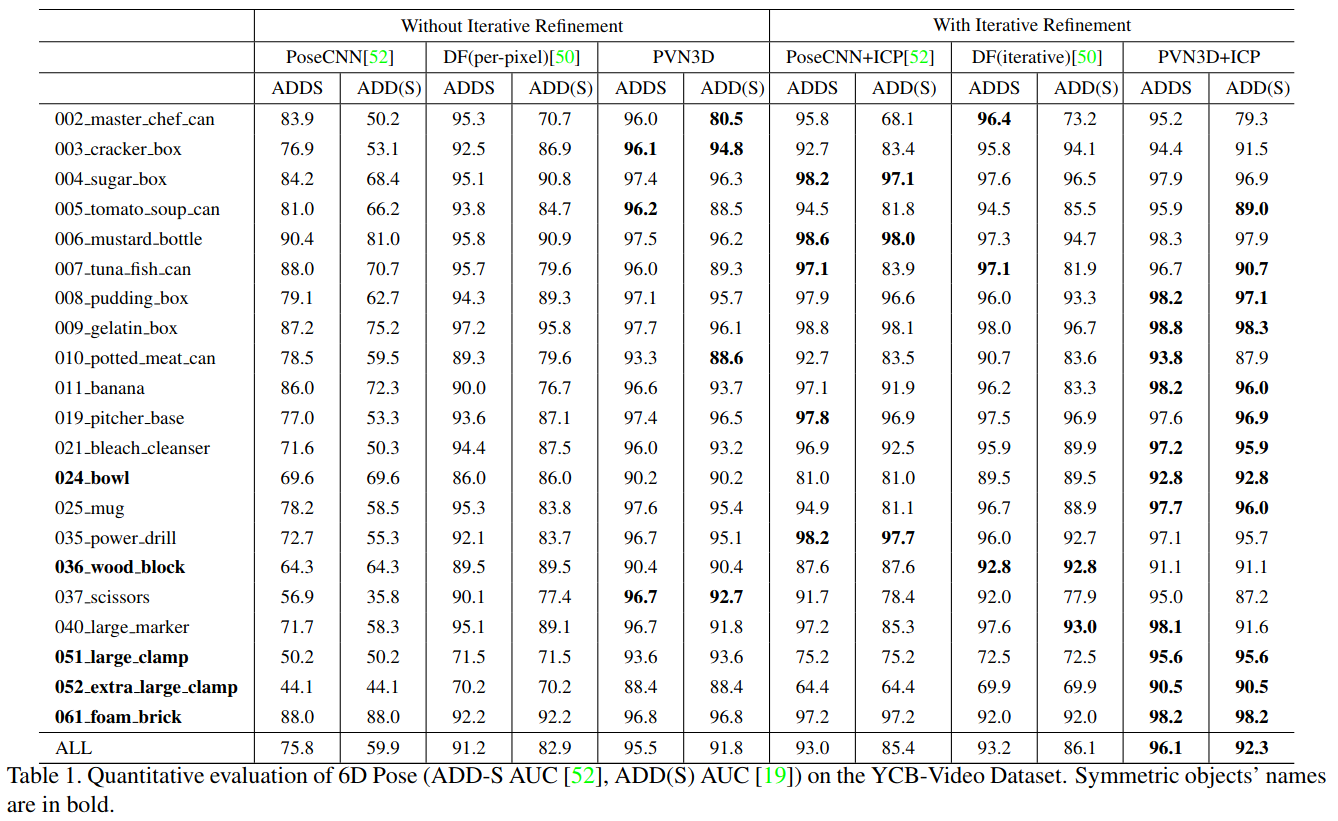
- Evaluation result on the YCB-Video dataset:
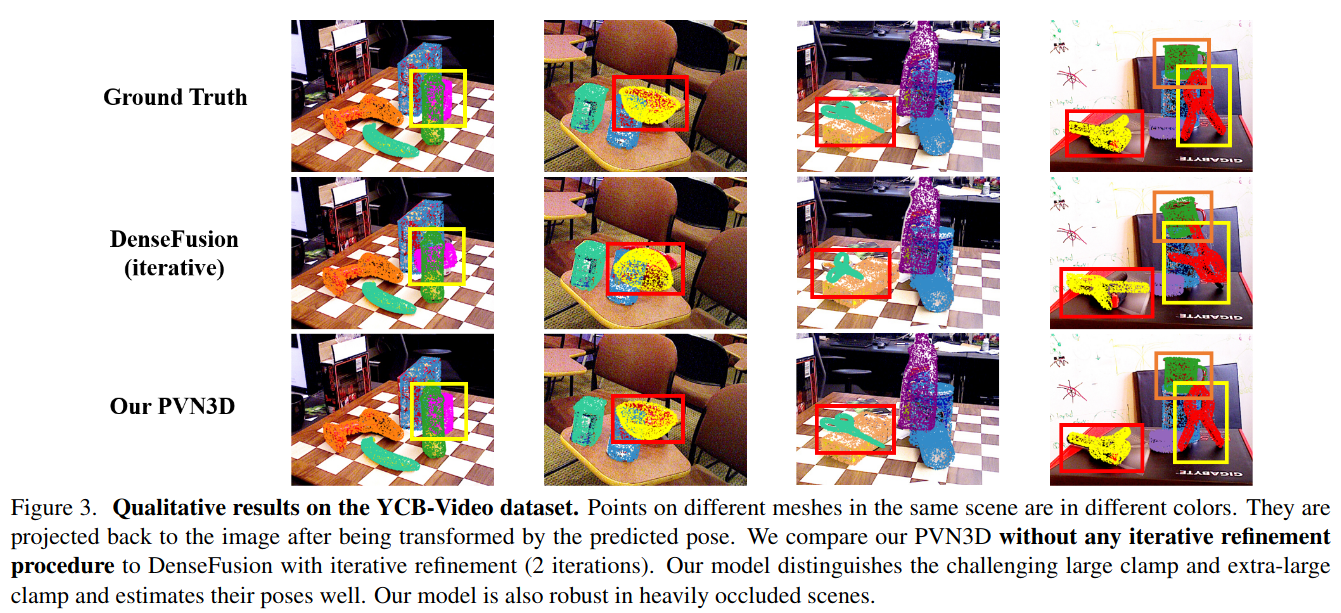
- Visualization of some predicted poses on YCB-Video dataset:
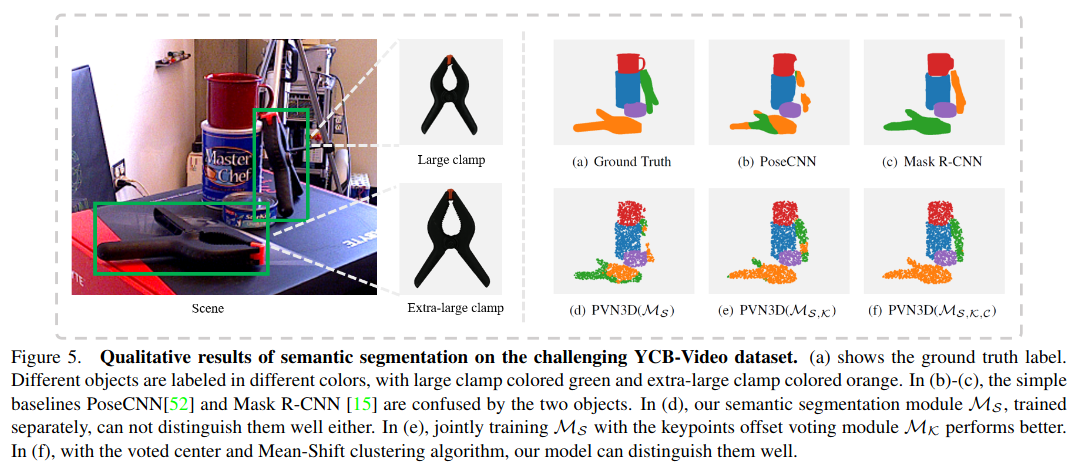
- Joint training for distinguishing objects with similar appearance but different in size:




- Compile the FPS scripts (refer from clean-pvnet):
cd lib/utils/dataset_tools/fps/
python3 setup.py build_ext --inplace
- Generate information of objects, eg. radius, 3D keypoints, etc. in your datasets with the
gen_obj_info.pyscript:
cd ../
python3 gen_obj_info.py --help
- Modify info of your new dataset in
PVN3D/pvn3d/common.py - Write your dataset preprocess script following
PVN3D/pvn3d/datasets/ycb/ycb_dataset.py(for multi objects of a scene) orPVN3D/pvn3d/datasets/linemod/linemod_dataset.py(for single object of a scene). Note that you should modify or call the function that get your model info, such as 3D keypoints, center points, and radius properly. - (Important!) Visualize and check if you process the data properly, eg, the projected keypoints and center point, the semantic label of each point, etc. For example, you can visualize the projected center point (blue point) and selected keypoints (red points) as follow by running
python3 -m datasets.linemod.linemod_dataset.
- For inference, make sure that you load the 3D keypoints, center point, and radius of your objects in the object coordinate system properly in
PVN3D/pvn3d/lib/utils/pvn3d_eval_utils.py.

Please cite PVN3D if you use this repository in your publications:
@InProceedings{He_2020_CVPR,
author = {He, Yisheng and Sun, Wei and Huang, Haibin and Liu, Jianran and Fan, Haoqiang and Sun, Jian},
title = {PVN3D: A Deep Point-Wise 3D Keypoints Voting Network for 6DoF Pose Estimation},
booktitle = {IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2020}
}