ground_extarct_in_country_road
基于激光线性特征进行可行驶路径粗提取
-
VLP32C mode(当前), dual VLP16 mode, VLP32C+ dual VLP16 mode
-
dependency:
ecl-geometry包
sudo apt install ros-kinetic-ecl-geometry
-
VLP32C line feature mode (currently adopt)
-
只接受未补偿激光原始32线数据作为输入,因激光角度值用于激光线数判断和每点yaw值计算
-
ground_detect.launch 所选用最低的线数 <arg name="low_lines" default="4" /> 判断为路面的线段距离主线段的最大z轴差距 <arg name="z_threshold" default="0.06" /> 成为线段间相邻点的距离阈值(key param) <arg name="distance_threshold" default="0.20" /> 采用输出的坐标系选择 <!-- map_tf:1. velo_middle 2. geometry_center--> <arg name="map_tf" default="geometry_center" /> 成为线段的最小点数 <arg name="lowest_segment_point_num" default="12" /> 路径生成中噪点忽略阈值 <arg name="abandon_min_points_num" default="6" />
-
roslaunch ground_detect ground_detect.launch -
-
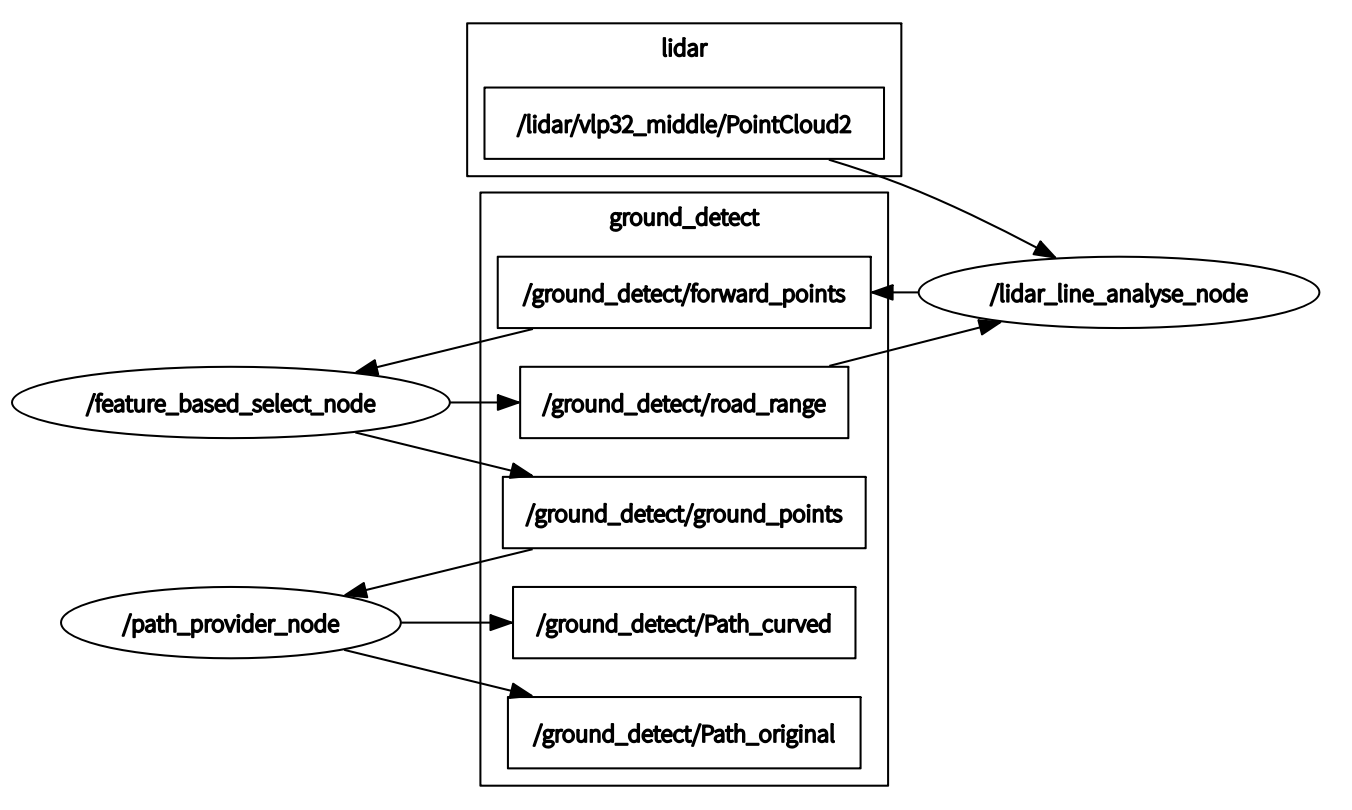
/lidar_line_nanlyse_node:
将原始激光点
/lidar/vlp32_middle/PointCloud2进行线数判断(复用intensity字段整数部分),yaw角计算(复用intensity字段小数部分),距离选取,并根据上一帧路面点的每一线的角度范围/ground_detect/road_range,在当前帧中筛选潜在路面点/ground_detect/forward_points后发布 -
/feature_based_select_node:
在潜在路面点
/ground_detect/forward_points中寻找线段组并进行合并作为每一线的路面点,,计算每一线的路面点的角度范围/ground_detect/road_range并发布,以及选定路面点/ground_detect/ground_points -
/path_provider_node:
根据选定路面点
/ground_detect/ground_points求取每一线点的重心,存入缓冲区,并依据多帧结果给出当前帧当前线的路面重心点作为路径点。对所选中线数的路径点进行三次样条拟合,并生成path后发布/ground_detect/Path_curved,拟合前path/ground_detect/Path_original
-
-
-
dual VLP16 mode
-
roslaunch ground_detect ground_detect_2VLP16.launch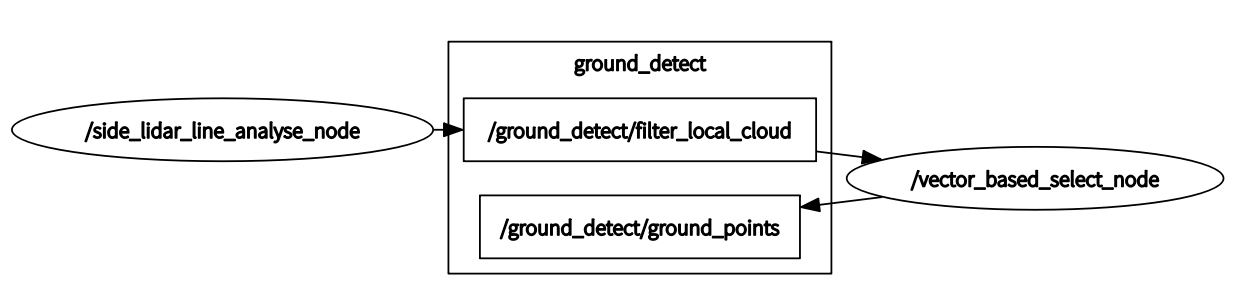
-
-
VLP32C+ dual VLP16 grid map mode
-
roslaunch ground_detect ground_detect_grid_map.launch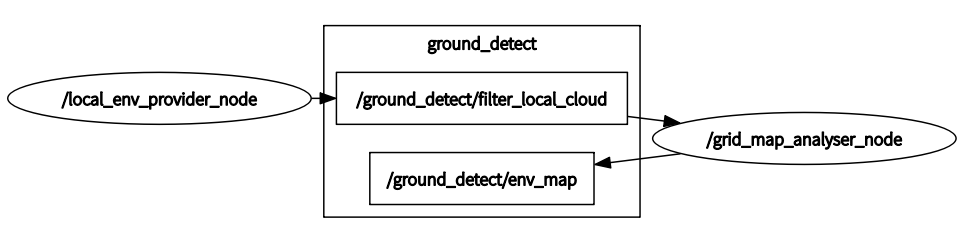
-
-
VLP32C+ dual VLP16 ransac get_plane mode
roslaunch ground_detect ground_detect_ransac.launch


