




python drive.py
打开远程遥控器,控制开始或结束



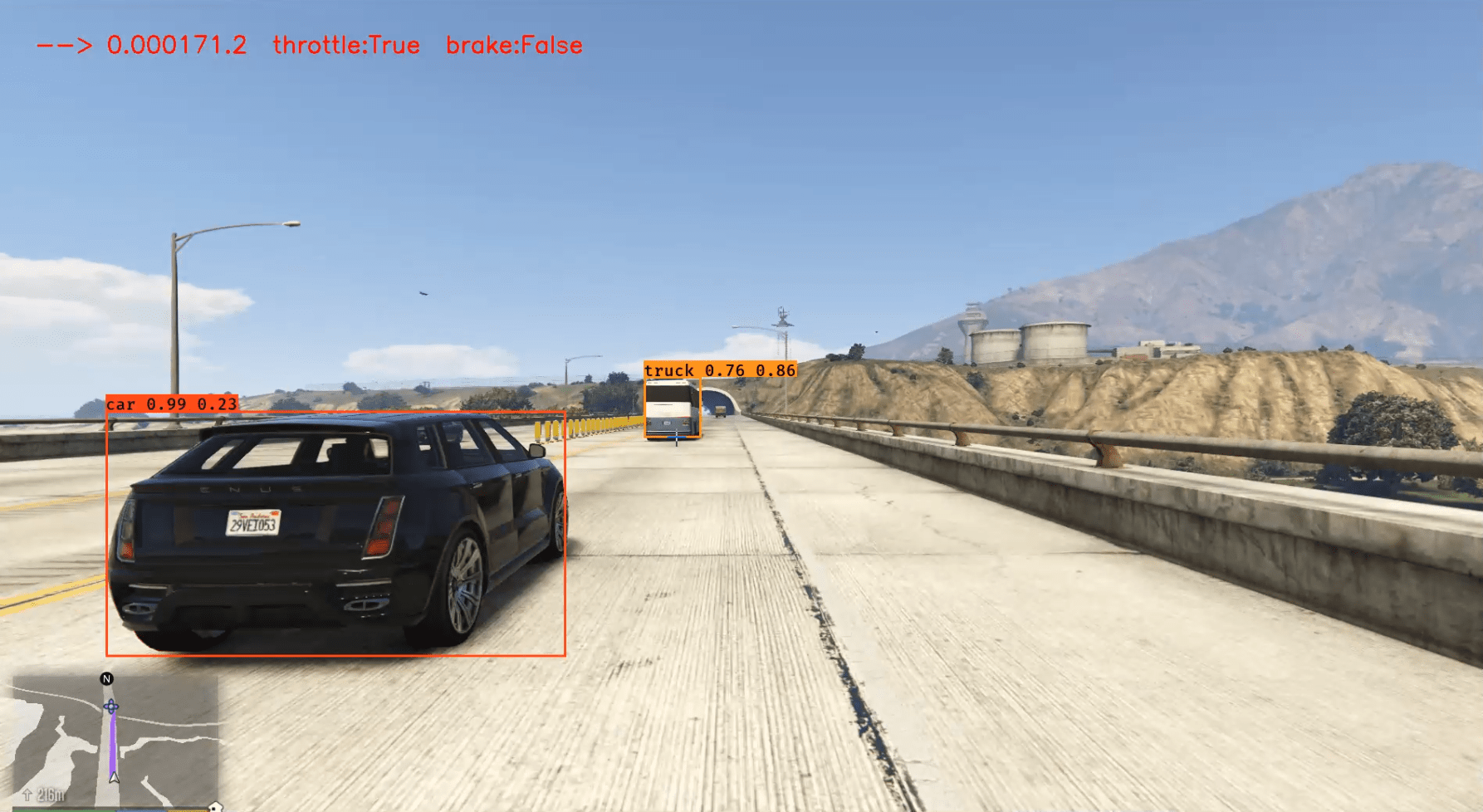
控制GTA5中的汽车运行:使用DeepGTAV控制车辆速度,以及转弯角度。
绘制卷积神经网络图像:draw_convnet,keras的plot_model函数
基于纯视觉端到端深度学习的自动驾驶系统代码库
python drive.py
打开远程遥控器,控制开始或结束
控制GTA5中的汽车运行:使用DeepGTAV控制车辆速度,以及转弯角度。
绘制卷积神经网络图像:draw_convnet,keras的plot_model函数
基于纯视觉端到端深度学习的自动驾驶系统代码库
MIT License