The official implementation of the ICCV 2023 paper Robust Object Modeling for Visual Tracking

[Models and Raw Results] (Google Drive) [Models and Raw Results] (Baidu Netdisk: romt)
[September 21, 2023]
- We release Models and Raw Results of ROMTrack.
- We refine README for more details.
[August 6, 2023]
- We release Code of ROMTrack.
[July 14, 2023]
- ROMTrack is accepted to ICCV2023.
- Code for ROMTrack
- Model Zoo and Raw Results
- Refine README
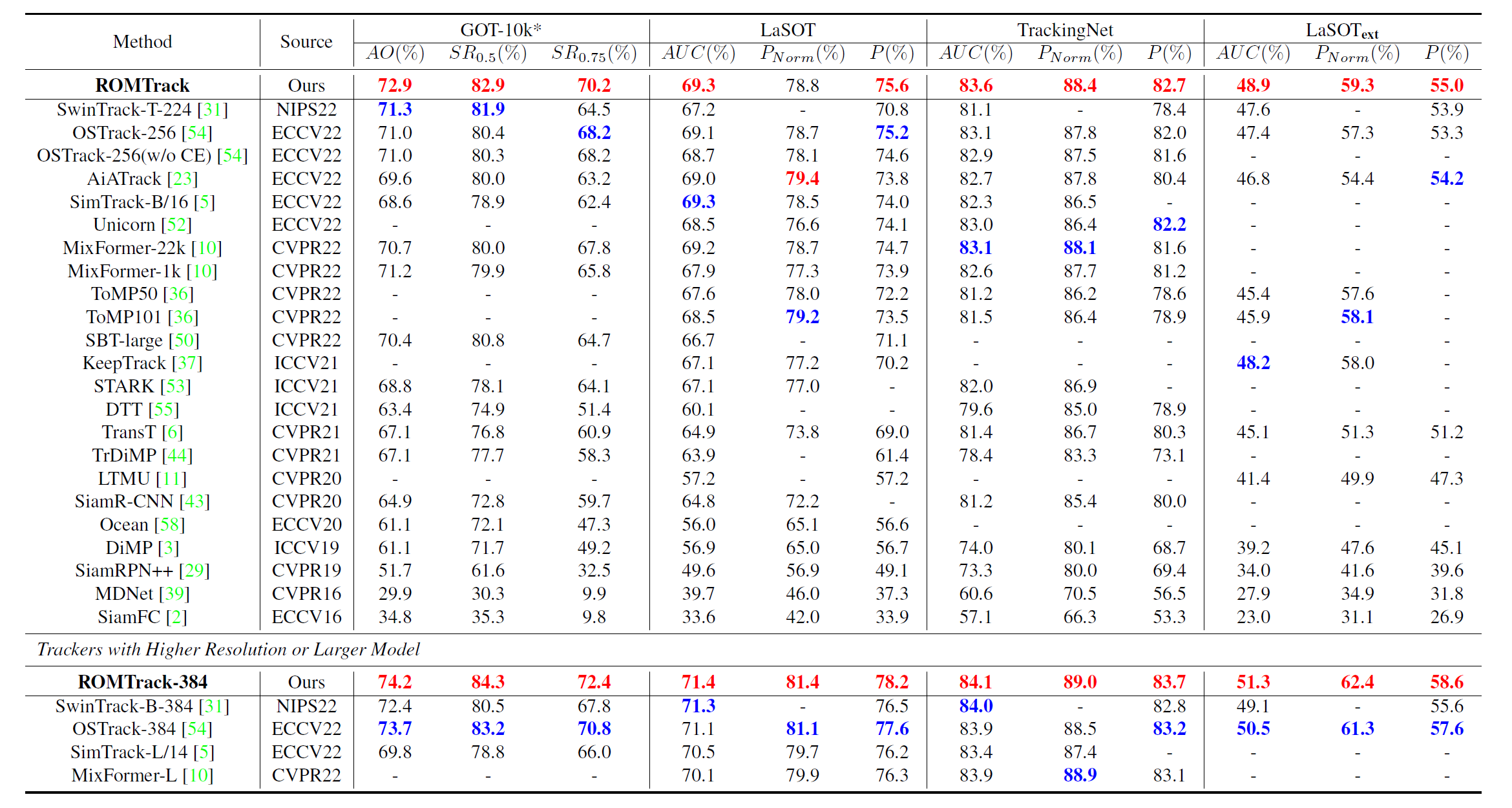
- ROMTrack employes a robust object modeling design which can keep the inherent information of the target template and enables mutual feature matching between the target and the search region simultaneously.

- Robustness Comparison with SOTA methods (bounding box only) on VOT2020.


- Performance on Benchmarks
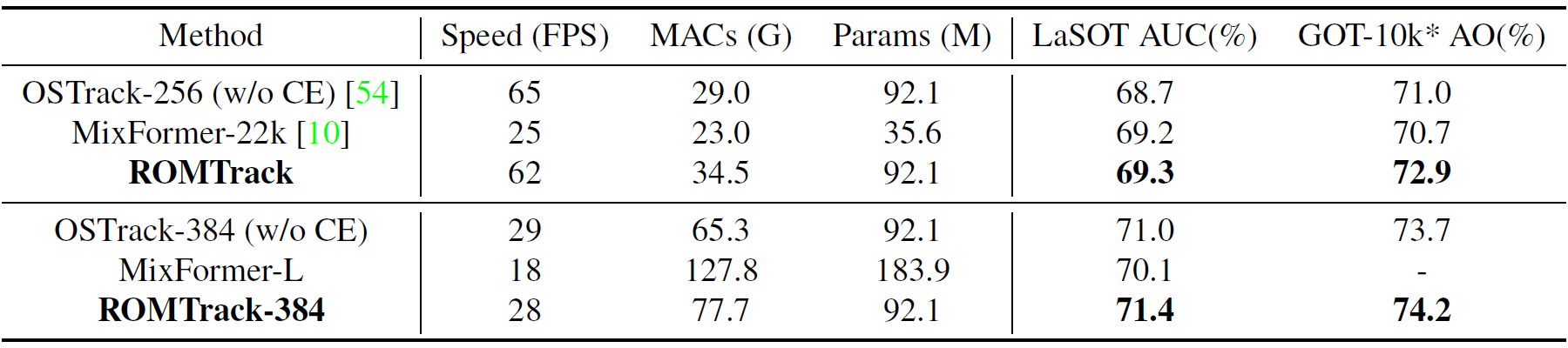
- Speed, MACs, Params (Test on 1080Ti)


Use the Anaconda
conda create -n romtrack python=3.6
conda activate romtrack
bash install_pytorch17.sh
Put the tracking datasets in ./data. It should look like:
${ROMTrack_ROOT}
-- data
-- lasot
|-- airplane
|-- basketball
|-- bear
...
-- lasot_ext
|-- atv
|-- badminton
|-- cosplay
...
-- got10k
|-- test
|-- train
|-- val
-- coco
|-- annotations
|-- train2017
-- trackingnet
|-- TRAIN_0
|-- TRAIN_1
...
|-- TRAIN_11
|-- TEST
Run the following command to set paths for this project
python tracking/create_default_local_file.py --workspace_dir . --data_dir ./data --save_dir .
After running this command, you can also modify paths by editing these two files
lib/train/admin/local.py # paths about training
lib/test/evaluation/local.py # paths about testing
Training with multiple GPUs using DDP. More details of other training settings can be found at tracking/train_romtrack.sh
bash tracking/train_romtrack.sh
- LaSOT/LaSOT_ext/GOT10k-test/TrackingNet/OTB100/UAV123/NFS30. More details of test settings can be found at
tracking/test_romtrack.sh
bash tracking/test_romtrack.sh
python tracking/profile_model.py --config="baseline_stage1"
We provide attention maps and feature maps for several sequences on LaSOT. Detailed analysis can be found in our paper.

- Thanks for STARK, PyTracking and MixFormer Library, which helps us to quickly implement our ideas and test our performances.
- Our implementation of the ViT is modified from the Timm repo.
If our work is useful for your research, please feel free to star:star: and cite our paper:
@article{DBLP:journals/corr/abs-2308-05140,
author = {Yidong Cai and
Jie Liu and
Jie Tang and
Gangshan Wu},
title = {Robust Object Modeling for Visual Tracking},
journal = {CoRR},
volume = {abs/2308.05140},
year = {2023}
}